Sensor de desplazamiento.
Sensor de desplazamiento con un cuerpo sensor (1) móvil relativamente y un circuito receptor o circuito de evaluación que coopera con ello,
el cual genera una señal de salida dependiente del desplazamiento o de la situación del cuerpo sensor (1), estando el cuerpo sensor (1) eléctricamente conductor dispuesto entre bobinas estacionarias de una disposición de bobinas de reactancia diferencial y reaccionando el circuito de evaluación a la impedancia de las bobinas de reactancia dependiente del cuerpo sensor,
caracterizado por que
las bobinas de reactancia (2', 2'') eléctricamente están dispuestas en una conexión en serie, que en el funcionamiento es atacada con una tensión rectangular de alta frecuencia, de manera que entre las bobinas de reactancia pueden tomarse impulsos de tensión alterna de alta frecuencia, y por que el circuito de evaluación evalúa una diferencia entre elevaciones de tensión de impulsos consecutivos y la convierte en una indicación de desplazamiento, siendo registradas las elevaciones de tensión respectivamente con retraso predeterminado con respecto a los flancos de inicio positivos o negativos de los impulsos de tensión consecutivos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11188164.
Solicitante: EBE Elektro-Bau-Elemente GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Sielminger Strasse 63 70771 Leinfelden-Echterdingen ALEMANIA.
Inventor/es: DILGER,STEFAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/22 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen diferencialmente sobre dos bobinas.
PDF original: ES-2543390_T3.pdf
Fragmento de la descripción:
Sensor de desplazamiento
El invento se refiere a un sensor de desplazamiento según el preámbulo de la reivindicación 1.
Un sensor de desplazamiento de esta naturaleza es conocido por el documento EP 0 348 259 A1 y tiene un cuerpo sensor eléctricamente conductor dispuesto entre bobinas estacionarias de una disposición de bobinas de reactancia diferencial, así como un circuito de evaluación que genera la señal transmitida por la situación del cuerpo sensor. Un sensor de desplazamiento semejante se describe en el documento US 2004/222801.
Por principio es deseable en el caso de sensores de desplazamiento conseguir una precisión de medida muy alta.
Este problema es solucionado en un sensor de desplazamiento del género indicado al principio mediante las particularidades de la caracterización de la reivindicación 1.
En ello el invento utiliza el conocimiento de que la sensibilidad del circuito de evaluación y con ello la precisión de medida del sensor de desplazamiento pueden ser claramente aumentadas si las bobinas son atacadas con una tensión alterna de alta frecuencia, puesto que las variaciones de impedancia provocadas por el cuerpo sensor se hacen especialmente claras.
Además en el invento está previsto que las bobinas de reactancia eléctricamente estén dispuestas en una conexión en serie, que en el funcionamiento es atacada con una tensión rectangular de alta frecuencia, de manera que entre las bobinas de reactancia pueden tomarse impulsos de tensión alterna de alta frecuencia, evaluando el circuito de evaluación una diferencia entre elevaciones de tensión de impulsos consecutivos y convirtiéndola en una indicación de desplazamiento.
Finalmente en el invento está previsto registrar las elevaciones de tensión respectivamente con retraso predeterminado con respecto a los flancos de inicio positivos o negativos de los impulsos de tensión alterna consecutivos. De esta manera no es necesario calcular las extraordinariamente altas amplitudes de los impulsos de tensión alterna, más bien se calcula un valor característico en el flanco de caída de los respectivos impulsas. Esto es realizable en la técnica de medida con alta precisión y de manera sencilla.
En el resultado se evalúan por lo tanto diferencias entre puntos característicos de los flancos de caída de los impulsos de tensión. En ello según una forma de realización preferida del invento existe la posibilidad de formar respectivamente un valor medio mediante un número predeterminado de las diferencias calculadas. Puesto que las elevaciones de tensión presentan la misma frecuencia que la tensión alterna de alta frecuencia que ataca las bobinas de reactancia, la formación del valor medio puede efectuarse mediante comparativamente muchas diferencias, sin embargó se obtiene aún una alta frecuencia de señal para la indicación del circuito de evaluación.
Por lo demás en cuanto a las características preferidas del invento se hace remisión a las reivindicaciones y a la subsiguiente explicación del dibujo, con ayuda de una forma de realización especialmente preferida del invento es explicado en detalle.
Se reivindica protección no sólo para las combinaciones de características indicadas o representadas, sino también para por principio cualesquiera combinaciones de las características individuales indicadas o representadas.
En el dibujo muestra
La Figura 1 una representación esquematizada del sensor de desplazamiento según el invento,
la Figura 2 un diagrama de conexiones esquematizado del sensor de desplazamiento según el invento o de su circuito de evaluación y
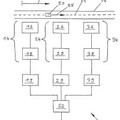
la Figura 3 diagramas de las tensiones eléctricas aplicadas o que pueden tomarse en puntos de conexión A, B y C.
Según la Figura 1 a ambos lados de un cuerpo sensor 1 eléctricamente conductor, que es móvil en la dirección de la doble flecha B, están dispuestas bobinas de reactancia estacionarias 2 y 2", preferentemente coaxiales una con respecto a otra. Estas bobinas de reactancia están alojadas respectivamente en carcasas 3 en forma de cazoleta, que con sus aberturas están dirigidas una hacia otra. En el fondo de las carcasas 3 está en cada caso conformado un núcleo de bobina en forma de barra que pasa axialmente a través de la correspondiente bobina hasta su extremo frontal libre. Estas carcasas se componen de un material magnetizable, por ejemplo material de ferrita.
Según la Figura 2 las conexiones A y B de una conexión en serie formada por las bobinas de reactancia 2 y 2" están unidas con un generador de alta frecuencia 4, que ataca las conexiones A y B respectivamente con una tensión alterna rectangular de alta frecuencia. En ello la tensión alterna rectangular de alta frecuencia aplicada a la conexión B está desplazada en una media longitud de onda con respecto a la tensión alterna rectangular de alta frecuencia aplicada al
punto de conexión A en la misma frecuencia, por ejemplo 50 kHz. En el punto de conexión C entre las bobinas de reactancia 2 y 2" puede tomarse una tensión alterna de alta frecuencia marcadamente en forma de impulso, cuya frecuencia corresponde a la frecuencia de la tensión alterna rectangular de alta frecuencia aplicada a los puntos de conexión A y B. Cuando el cuerpo sensor 1 toma una situación central, las amplitudes positivas y negativas de la tensión alterna que puede tomarse en C tienen los mismos valores absolutos. En caso de desplazamiento del cuerpo sensor 1 fuera de la situación central resultan entonces relaciones de magnitud muy diferentes.
Conforme a la técnica de medida está previsto ahora según el invento en lugar de las amplitudes de los impulsos difícilmente registrables debido a su magnitud registrar los valores de tensión Sv, que tras un tiempo de retardo v se presentan tras el respectivo flanco de inicio del respectivo impulso. Desde ahora la diferencia entre los valores de tensión Sv es formada por impulsos de polaridad opuesta consecutivos en el tiempo, para generar una señal para el movimiento de desplazamiento del cuerpo sensor 1.
Esto puede realizarse conforme a la técnica de medida mediante un convertidor analógico-digital conectado en C en el lado de entrada, que para el registro de los flancos de entrada de los impulsos positivos o negativos recibe señales del generador de alta frecuencia 4, que reproducen los instantes de los flancos rectangulares de la tensión alterna rectangular de alta frecuencia. Estos instantes corresponden a los instantes de los flancos de inicio de los impulsos de tensión alterna en el punto de conexión C. Si ahora el convertidor analógico-digital calcula los valores de tensión Sv respectivamente con retardo de tiempo predeterminado tras las señales de tiempo del generador de alta frecuencia 4 para los flancos rectangulares y forma las correspondientes diferencias, se ofrece simultáneamente la posibilidad de someter un número predeterminado de diferencias calculadas sucesivamente a una formación de valor medio y/o a una adición. Por ejemplo en el caso de una frecuencia del generador de alta frecuencia de 50 kHz respectivamente pueden aprovecharse 1.000 diferencias consecutivas en el tiempo para una formación de valor medio o adición, sin embargo los valores medios o la adición siguen uno tras otro con una frecuencia de 50 kHz de manera que las variaciones de desplazamiento del cuerpo sensor 1 son registradas con frecuencia de señal adecuadamente alta (50 Hz).
Mediante una adición de diferencias consecutivas o valores medios consecutivos la sensibilidad de la evaluación puede ser elevada con todavía suficiente frecuencia de señal.
Las bobinas de reactancia 2 y 2" pueden estar dispuestas en una platina, que soporta todas las piezas de construcción eléctricas necesarias para la evaluación de las señales. Esta platina puede en principio de manera discrecional estar sujeta en una pieza de construcción de máquina, que por su parte sea móvil relativamente con respecto a una pieza de construcción de máquina adyacente, que por su parte soporta el cuerpo sensor 1. De esta manera fuerzas o momentos de giro activos entre las piezas de construcción de máquina pueden ser calculados con más alta precisión y pequeños gastos en cuanto a la técnica de medida.
Dado el caso el cuerpo sensor 1 puede estar también configurado y dispuesto a manera de una viga empotrada en un lado, siendo el extremo libre de la viga empotrada móvil entre las bobinas de reactancia 2 y 2". De esta manera las cargas de la viga pueden calcularse por ejemplo en una disposición de cuna con mucha precisión.
En todas las formas de realización es ventajoso que el circuito de evaluación pueda ser tarado en todo momento, de manera que en el transcurso de largos periodos de tiempo... [Seguir leyendo]
Reivindicaciones:
1. Sensor de desplazamiento con un cuerpo sensor (1) móvil relativamente y un circuito receptor o circuito de evaluación
que coopera con ello, el cual genera una señal de salida dependiente del desplazamiento o de la situación del cuerpo sensor (1), estando el cuerpo sensor (1) eléctricamente conductor dispuesto entre bobinas estacionarias de una disposición de bobinas de reactancia diferencial y reaccionando el circuito de evaluación a la impedancia de las bobinas de reactancia dependiente del cuerpo sensor,
caracterizado por que
las bobinas de reactancia (2, 2") eléctricamente están dispuestas en una conexión en serie, que en el funcionamiento es atacada con una tensión rectangular de alta frecuencia, de manera que entre las bobinas de reactancia pueden tomarse impulsos de tensión alterna de alta frecuencia, y por que el circuito de evaluación evalúa una diferencia entre elevaciones de tensión de impulsos consecutivos y la convierte en una indicación de desplazamiento, siendo registradas las elevaciones de tensión respectivamente con retraso predeterminado con respecto a los flancos de inicio positivos o negativos de los impulsos de tensión consecutivos.
2. Sensor de desplazamiento según la reivindicación 1, caracterizado por que
para la generación de la señal de desplazamiento se forma respectivamente un valor medio y/o una suma mediante un número predeterminado de las diferencias calculadas.
3. Sensor de desplazamiento según una de las reivindicaciones 1 y 2, caracterizado por que
el cuerpo sensor (1) está dispuesto con movilidad dependiente de la fuerza con relación a las bobinas de reactancia (2, 2").
4. Sensor de desplazamiento según una de las reivindicaciones 1 a 3, caracterizado por que
las bobinas de reactancia (2, 2") están dispuestas respectivamente en carcasas (3) en forma de cazoleta de material magnetizable y con un núcleo de bobina conformado en el fondo de la cazoleta, el cual pasa axialmente a través de la respectiva bobina (2, 2") y las aberturas de las cazoletas están dirigidas una hacia otra.
5. Sensor de desplazamiento según la reivindicación 4, caracterizado por que
las carcasas (3) en forma de cazoleta se componen de material de ferrita.
6. Sensor de desplazamiento según una de las reivindicaciones 1 a 5, caracterizado por que
las bobinas de reactancia (2, 2") están dispuestas coaxiales una con respecto a otra.
7. Sensor de desplazamiento según una de las reivindicaciones 1 a 6, caracterizado por que
el cuerpo sensor (1) es móvil en la dirección del eje de las bobinas.
Patentes similares o relacionadas:
Objetivo de medición magnética, del 28 de Agosto de 2019, de Safran Landing Systems: Objetivo de medición magnética adaptado para colocarse en el interior de un eje de vehículo y para actuar conjuntamente con al menos dos sensores magnéticos […]
Determinación de posición inductiva, del 21 de Agosto de 2019, de ZF FRIEDRICHSHAFEN AG: Dispositivo de determinación de posición inductiva que comprende: - una bobina ; - un elemento de posición ; - un equipo de exploración […]
Acoplamiento para dispositivo de indicación de posición, del 12 de Diciembre de 2018, de GENERAL ELECTRIC COMPANY: Un sistema de indicación de la posición para medir una posición de una válvula de vapor, que comprende dicho sistema: una pieza […]
Medida materializada así como dispositivo de medición de posición, del 28 de Noviembre de 2018, de DR. JOHANNES HEIDENHAIN GMBH: Medida materializada, para la medición inductiva de la posición a lo largo de una dirección de medición X, que comprende - un perfil de soporte de material eléctricamente […]
Sensor de ángulos, del 6 de Diciembre de 2017, de Diehl Defence GmbH & Co. KG: Sensor de ángulos que comprende un rotor que predetermina el ángulo a medir, un generador de campo magnético y un estator con al menos una bobina […]
Dispositivo para la medición en tiempo real de parámetros de un estado de tensión mecánica y propiedades biomecánicas de tejido biológico blando, del 6 de Septiembre de 2017, de Myoton AS: Un dispositivo para medir simultáneamente los parámetros que caracterizan el esfuerzo mecánico, la elasticidad, la rigidez dinámica y el […]
 Dispositivo y procedimiento para la determinación de la trayectoria de un blanco, del 4 de Noviembre de 2013, de PEPPERL + FUCHS GMBH: Dispositivo para determinar la posición de un blanco , especialmente metálico, especialmente para realizar el procedimiento según una de las reivindicaciones […]
Dispositivo y procedimiento para la determinación de la trayectoria de un blanco, del 4 de Noviembre de 2013, de PEPPERL + FUCHS GMBH: Dispositivo para determinar la posición de un blanco , especialmente metálico, especialmente para realizar el procedimiento según una de las reivindicaciones […]
 SISTEMA DE DETECCIÓN DE MOVIMIENTO DE CINTA DE IMPRESORA, del 30 de Mayo de 2011, de PRINTRONIX, INC: Sistema de detección de movimiento de cinta de impresora que comprende, un elemento rotativo que presenta por lo menos un elemento posicionado […]
SISTEMA DE DETECCIÓN DE MOVIMIENTO DE CINTA DE IMPRESORA, del 30 de Mayo de 2011, de PRINTRONIX, INC: Sistema de detección de movimiento de cinta de impresora que comprende, un elemento rotativo que presenta por lo menos un elemento posicionado […]