Dispositivo de recuperación quirúrgico.
Un aparato de recuperación quirúrgico que comprende:
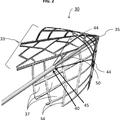
una pluralidad de miembros formados orientados radialmente (14,
15) que se extienden sustancialmente separados a una misma distancia alrededor de un eje (18) desde un primer extremo hasta un segundo extremo respectivo y se mantienen en un acoplamiento fijo alrededor del eje (18) mediante los medios (17); donde dicha pluralidad de miembros formados orientados radialmente (14, 15) son alambres formados de un material con memoria de forma; y
en donde la posición radial separada y la forma de los miembros formados (14, 15) en dicho acoplamiento fijo definen una cesta de captura (11) que tiene una forma de cesta con una pluralidad de aberturas (26) formadas entre dicha pluralidad de miembros formados orientados radialmente (14, 15); dicho primer extremo y dicho segundo extremo de dicha pluralidad de miembros formados orientados radialmente que constituyen, respectivamente, un primer extremo y un segundo extremo de dicha cesta de captura; además en donde dicho primer extremo de la cesta de captura (11) se acopla al extremo distal de un alambre de control (20) acoplado trasladablemente dentro de un conducto que corre a través de un catéter (16) que permite repetidamente el despliegue y la posición colapsada de la cesta (11); el segundo extremo del alambre de control (20) que corre hasta un actuador manipulable por el cirujano;
además en donde una boca de dicha cesta de captura se define por una abertura formada por un primer par de dichos miembros formados orientados radialmente (14, 15) en dicho acoplamiento al eje central (18) y posicionados opuestos entre sí en el mismo plano a 180 grados, así que forman una boca plana que tiene una forma de boca y un área de boca; además en donde dicha cesta de captura (11) es adecuada para capturar un componente objetivo a través de dicha boca y además en donde dicho aparato comprende además una trampa de cauterización (22) acoplada en dicho segundo extremo de dicha cesta de captura, dicha trampa formada por dos miembros laterales formados opuestos que definen una abertura de trampa en el medio y una forma de abertura de trampa; dichos miembros laterales de trampa posicionados para ocupar dicho plano; dicha trampa que se proyecta lejos de dicho primer extremo de dicha cesta de captura en una posición de proyección.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/012474.
Solicitante: Saleh, Rafic.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 291 Circle D, Aguadilla Puerto Rico 00603 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SALEH, RAFIC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/22 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Instrumentos para comprimir úlceras o similares situadas sobre órganos internos del cuerpo; Utensilios para el legrado de las cavidades de los órganos del cuerpo, p. ej. de los huesos; para la eliminación o la destrucción invasiva de cálculos mediante la utilización de vibraciones mecánicas; para la eliminación de obstrucciones en los vasos sanguíneos no prevista en otro lugar.
PDF original: ES-2542526_T3.pdf
Fragmento de la descripción:
Dispositivo de recuperación quirúrgico Campo de la invención
El dispositivo descrito se refiere a dispositivos de recuperación para usar en cirugías. El dispositivo mejora particularmente la captura y/o recuperación de tejido tal como pólipos u otras piezas de materia orgánica o inorgánica posicionadas dentro del cuerpo.
Antecedentes de la invención
Las cirugías laparoscópicas o similares donde se emplea un tubo con una luz y una lente de cámara en el extremo (laparoscopio) para examinar órganos, buscar anomalías, o realizar cirugías mínimo invasivas son una alternativa deseable para técnicas quirúrgicas anteriores que requieren incisiones grandes. De una forma similar, los procedimientos en gastroenterología emplean tales dispositivos para buscar y remover pólipos colorectales los cuales se forman sobre el revestimiento del intestino.
Tales procedimientos generalmente emplean una cámara pequeña adyacente a los instrumentos insertados a través de pequeñas incisiones en el cuerpo del paciente, o dentro de cavidades del cuerpo del paciente. Tales procedimientos pueden involucrar la eliminación de tejido para una dolencia específica, tal como la vesícula biliar, o pueden ser de naturaleza exploratoria donde se toman y extraen muestras de tejido del cuerpo para su examen y pruebas. Sólo unas cuantas de tales operaciones incluyen, pero no se limitan a, una polipectomía, una broncoscopia, un bulboscopia, una colonoscopia, un duodenoscopia, una endoscopia y una gastroscopia. En vez de un dispositivo de tipo catéter, cuando se usan para procedimientos poco invasivos a través del intestino inferior, tales dispositivos se especializan además como para una endoscopia o en muchas otras versiones especializadas que incluyen pero no se limitan a un gastroscopio, o colonoscopio, o sigmoidoscopio o broncoscopio. Estos tipos de dispositivos generalmente tiene el componente de vídeo que sigue una trayectoria colineal en un conducto flexible común.
Los dispositivos quirúrgicos operables manualmente empleados para tales procedimientos dentro del cuerpo de un paciente por un cirujano desde una posición fuera del paciente están generalizados y son bien conocidos. En un procedimiento convencional, los componentes de corte y recuperación empleados por el cirujano se localizan en el extremo distal del instrumento quirúrgico. En un procedimiento de eliminación de pólipo convencional, un endoscopio se inserta dentro de una cavidad interna de un paciente y se manipula para buscar cualquier crecimiento de tejido anormal tal como pólipos. Si un tejido tal como un pólipo se localiza para la eliminación, un alambre que se extiende a través de una trayectoria alargada en el canal de biopsia del endoscopio se traslada hacia el extremo distal del dispositivo para proyectar un lazo de cauterización conectado al alambre desde el extremo distal de la trayectoria que corre a través del endoscopio. Mediante el uso de una pantalla de vídeo el cirujano manipula entonces el lazo y el endoscopio desde afuera del paciente para acoplar el lazo con el pólipo. El alambre se posiciona alrededor de la base del pólipo después de lo cual una corriente eléctrica se comunica al lazo para cortar y cauterizar la región.
Como puede determinarse, en tal procedimiento donde el tejido se elimina para el muestreo o como un objetivo del procedimiento, es imperativo que el cirujano sea capaz de ver el tejido en cuestión en el extremo distal del dispositivo quirúrgico desplegado dentro del paciente. La observación se logra convencionalmente a través de un enlace de fibra óptica desde un lente hasta una pantalla de vídeo vista por los cirujanos afuera del cuerpo del paciente
Evitar la interferencia con la visión del cirujano es particularmente importante cuando se eliminan pequeñas muestras de tejido, tal como una polipectomía, puesto que los pólipos que se eliminan son pequeños y fáciles de perder. Además, una vez eliminados, ellos deben localizarse y recuperarse con un componente de recuperación. Sin embargo, los dispositivos de captura de tejido convencionales para este propósito se forman de redes o redes en una malla fina. La malla, especialmente en los confines pequeños de las cavidades del cuerpo tales como el intestino, puede deteriorar gravemente la visión del cirujano del tejido mediante el bloqueo de este desde la vista de la cámara. Además, la malla de interconexión de tales dispositivos se comunica eléctricamente u ofrece el potencial para tal, y por lo tanto tales dispositivos se inhiben de funcionar como ambos, la trampa o el instrumento de eliminación de tejido así como también la cesta de captura en conjunto.
Como tal, mediante el uso de componentes de recuperación de estilo de red de malla convencionales, posterior a la localización y eliminación de un pólipo u otra porción de tejido mediante la trampa electrificada, la recuperación y eliminación del tejido puede ser difícil debido un deterioro de la visión. Adicionalmente, la mayoría de tales componentes de recuperación de estilo de red no pueden posicionarse fácilmente alrededor del tejido puesto que la red que se acopla
alrededor de la boca de la red deteriora o evita el poslclonamlento y rotación de la boca en los confines pequeños de un intestino u otra cavidad del cuerpo pequeña.
El dispositivo y método descrito en la presente descripción enseña un componente de captura de tejido formado de alambres orientados radialmente que se extienden desde una porción de la boca alrededor de un eje central que se extiende hacia adelante a partir del alambre que lo acopla. A diferencia de la mayoría de los componentes de recolección de cesta de red o malla, los alambres orientados radlalmente que forman la cesta de captura del dispositivo descrito en la presente pueden retraerse completamente dentro de los tubos en los cuales ellos se extienden dentro del cuerpo. Además, una vez trasladados desde el extremo distal del tubo o conducto que los transporta, la boca formada y los alambres desconectados orientados radialmente que forman la cesta de captura se hacen girar fácilmente incluso dentro de la cavidad más pequeña, puesto que los alambres curvos se adaptan a colapsar para obtener un diámetro alrededor del eje tan pequeño como sea necesario.
Adicionalmente, a diferencia de las redes de malla y los dispositivos de recolección de tejido de estilo de interconexión los cuales se comunican por toda el área de superficie que comprende la cesta, el dispositivo descrito en la presente emplea alambres orientados radialmente curvos y alargados o varillas que proporcionan aberturas ininterrumpidas entre estos. En consecuencia, un cirujano que ve el objetivo deseado mediante el uso de la cámara tiene una vista ininterrumpida del tejido que se va a eliminar o recuperar a través de las aberturas radiales del dispositivo descrito. La proporción de las aberturas crea una vista muy mejorada para el cirujano en la pantalla de visualización afuera del cuerpo del paciente. El cirujano puede así fácilmente ver incluso el tejido más pequeño que se va a recuperar, y puede hacer girar o manipular la boca de la cesta de captura formada radialmente sobre este.
Además, mediante el aislamiento de los alambres o varillas que forman la porción de la cesta debajo de esos que forman la boca, el dispositivo descrito en la presente puede funcionar como una combinación de un instrumento de eliminación de tejido de trampa y cauterización, así como también la cesta de captura para agarrar el tejido eliminado. En un modo particularmente preferido del dispositivo, el componente de eliminación de trampa operado eléctricamente puede proporcionarse mediante la boca de la cesta de captura. Esta modalidad de doble función del dispositivo se habilita por las mismas aberturas y separaciones entre los alambres o varillas que forman la cesta y la porción de la boca ya que la corriente eléctrica no se comunica a los otros alambres desde esos que forman la boca sobre las aberturas que mejoran la vista.
Todas las modalidades del dispositivo, ya sea como una combinación de trampa y cesta de captura, o empleado singularmente, disfrutan de utilidad adicional proporcionada por su formación de alambre orientado radialmente con aberturas orientadas radlalmente. A diferencia de la malla convencional y otros dispositivos de cesta de captura ¡nterconectados, los cuales una vez desplegados desde el tubo generalmente no se trasladarán de vuelta dentro del tubo o catéter, una simple traslación del alambre de control dentro del conducto que lo transporta colapsa ambos, la porción de la boca de la cesta de captura descrita y las porciones de alambre radiales de vuelta dentro del tubo desde un primer extremo hasta el extremo opuesto, de esta manera que colapsa... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de recuperación quirúrgico que comprende:
una pluralidad de miembros formados orientados radialmente (14, 15) que se extienden sustancialmente separados a una misma distancia alrededor de un eje (18) desde un primer extremo hasta un segundo extremo respectivo y se mantienen en un acoplamiento fijo alrededor del eje (18) mediante los medios (17); donde dicha pluralidad de miembros formados orientados radialmente (14, 15) son alambres formados de un material con memoria de forma; y
en donde la posición radial separada y la forma de los miembros formados (14, 15) en dicho acoplamiento fijo definen una cesta de captura (11) que tiene una forma de cesta con una pluralidad de aberturas (26) formadas entre dicha pluralidad de miembros formados orientados radialmente (14, 15); dicho primer extremo y dicho segundo extremo de dicha pluralidad de miembros formados orientados radialmente que constituyen, respectivamente, un primer extremo y un segundo extremo de dicha cesta de captura; además en donde dicho primer extremo de la cesta de captura (11) se acopla al extremo distal de un alambre de control (2) acoplado trasladablemente dentro de un conducto que corre a través de un catéter (16) que permite repetidamente el despliegue y la posición colapsada de la cesta (11); el segundo extremo del alambre de control (2) que corre hasta un actuador manipulable por el cirujano;
además en donde una boca de dicha cesta de captura se define por una abertura formada por un primer par de dichos miembros formados orientados radialmente (14, 15) en dicho acoplamiento al eje central (18) y posicionados opuestos entre sí en el mismo plano a 18 grados, así que forman una boca plana que tiene una forma de boca y un área de boca; además en donde dicha cesta de captura (11) es adecuada para capturar un componente objetivo a través de dicha boca y además en donde dicho aparato comprende además una trampa de cauterización (22) acoplada en dicho segundo extremo de dicha cesta de captura, dicha trampa formada por dos miembros laterales formados opuestos que definen una abertura de trampa en el medio y una forma de abertura de trampa; dichos miembros laterales de trampa posicionados para ocupar dicho plano; dicha trampa que se proyecta lejos de dicho primer extremo de dicha cesta de captura en una posición de proyección.
2. Un aparato de recuperación quirúrgico de acuerdo con la reivindicación 1, donde la forma de los miembros orientados radialmente (14, 15) es circular, ovalada, creciente, de polígono o cualquier combinación de segmentos rectos, en ángulo o curvos, y la forma de la cesta de captura (11) se define respectivamente por la forma de los miembros formados (14, 15).
3. Un aparato de recuperación quirúrgico de acuerdo con las reivindicaciones 1 o 2, donde el primer par de los miembros formados (14) son eléctricamente conducibles y en comunicación eléctrica entre sí, dicho primer par de miembros formados en dicha comunicación que definen de esta manera una trampa de cauterización, los restantes de dicha pluralidad de miembros formados se aíslan eléctricamente.
4. Un aparato de recuperación quirúrgico de acuerdo con cualquiera de las reivindicaciones anteriores, donde el aparato incluye además medios para la rotación seleccionable del alambre de control (2) en dicho conducto y medios para hacer girar remotamente la cesta de captura (11) hasta 36 grados alrededor del eje (18).
5. Un aparato de recuperación quirúrgico de la reivindicación 4, que comprende además medios para proporcionar energía eléctrica al primer par de dichos miembros formados (14) para usar por determinados períodos de tiempo.
6. Un aparato de recuperación quirúrgico de acuerdo con la reivindicación 1, donde la trampa (22) es integral con los primeros alambres (14).
7. Un aparato de recuperación quirúrgico de la reivindicación 6, que comprende además medios para proporcionar energía eléctrica al primer par de dichos miembros formados para usar por determinados períodos de tiempo.
Patentes similares o relacionadas:
 Un dispositivo de captura de coágulos con múltiples cestas, del 29 de Julio de 2020, de DePuy Synthes Products, Inc: Un dispositivo de captura de coágulos con múltiples cestas , que comprende:
una cesta distal conectada a un cable , la cesta […]
Un dispositivo de captura de coágulos con múltiples cestas, del 29 de Julio de 2020, de DePuy Synthes Products, Inc: Un dispositivo de captura de coágulos con múltiples cestas , que comprende:
una cesta distal conectada a un cable , la cesta […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Herramienta de extracción para uso con dispositivo endoscópico, del 15 de Julio de 2020, de CONMED CORPORATION: Un aparato que comprende: un depósito expansible configurado para recibir un fluido compresible o incompresible […]
DISPOSITIVO PARA EL LEGRADO DE TRACTOS FISTULOSOS, del 2 de Julio de 2020, de SERVICIO ANDALUZ DE SALUD: La invención describe un dispositivo para el legrado de tractos fistulosos que está formado por un cuerpo cilíndrico que comprende: un […]
Asa, del 3 de Junio de 2020, de MEDICAL DEVICE TECHNOLOGIES, INC.: Un asa para enlazar un artículo, que comprende: bucles primero, segundo y tercero, cada uno de los bucles primero, […]
Aparato de trombectomía mecánica de inversión, del 13 de Mayo de 2020, de STRYKER CORPORATION: Un sistema de trombectomía mecánica para eliminar un coágulo de un vaso, comprendiendo el aparato: un catéter flexible que […]
Dispositivo de extracción de tejido contenido, del 29 de Abril de 2020, de Abreu, Christian: Un dispositivo de extracción de tejido para la introducción en una incisión en una región intracorpórea y para capturar y morcelar un tejido objetivo de la región […]
Transductor ultrasónico de resonancia, del 1 de Abril de 2020, de CHONGQING RONGHAI MEDICAL ULTRASOUND INDUSTRY LTD: Un transductor ultrasónico de resonancia que comprende una primera fuente de ultrasonidos para transmitir ultrasonidos y una unidad de reflexión […]