Perno de medición de fuerza.
Perno de medición de fuerza que comprende en la dirección longitudinal axial al menos un vástago (1) para la absorción de fuerza o la introducción de fuerza y axialmente adyacente a él al menos un sector de apoyo (2) aproximadamente redondo para introducir fuerza o para absorber fuerza,
en el que la fuerza (F) que se va a medir es introducida perpendicularmente a la dirección longitudinal, en el que están previstas en el sector de apoyo (2) redondo varias cavidades (4) con galgas extensométricas (5) aplicadas en su interior, caracterizado por que el sector de apoyo redondo (2) presenta tres elevaciones (3) redondeadas desplazadas tangencialmente 120º y que por dentro en el sector de apoyo (2) están previstas tres cavidades (4) desplazadas tangencialmente 120° que en la dirección longitudinal se extienden simétricas y paralelas a las elevaciones (3) y cuyas zonas de unión radiales forman cuerpos de deformación (17), en cuyas superficies laterales interiores (10) está aplicada, respectivamente, al menos una galga extensométrica (5) como captador de la tensión de flexión.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11001403.
Solicitante: HOTTINGER BALDWIN MESSTECHNIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Im Tiefen See 45 64293 Darmstadt ALEMANIA.
Inventor/es: SCHUSTER,HANS, JAUCH,CHRISTIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01L1/22 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 1/00 Medida de fuerzas o tensiones, en general (medida de la fuerza producida por un choque G01L 5/00). › utilizando calibres de sujeción de resistencia.
PDF original: ES-2530867_T3.pdf
Fragmento de la descripción:
Perno de medición de fuerza.
La invención se refiere a un perno de medición de fuerza según el preámbulo de la reivindicación 1.
Los pernos de medición de fuerza de este tipo son empleados en la técnica de medición industrial dondequiera que en un eje o un perno deban ser medidas fuerzas o cargas perpendicularmente a su dirección longitudinal.
Así, por el documento DE 35 00 891 C1 es conocido un perno de medición que a través de una barra basculante transmite una carga a dos paredes de soporte. Por una cara frontal del perno está labrada una escotadura que consiste en al menos dos superficies de medición planas que se extienden paralelas a la dirección de carga del perno y están dispuestas simétricamente con respecto a un eje neutro. En estas superficies planas de la escotadura son aplicadas galgas extensométricas opuestas que detectan la tensión de cizallamiento en caso de una carga del perno de medición en dirección perpendicular. Este perno de medición funciona según el principio de medición de la fuerza de cizalladura pero debido a su cuerpo de deformación aplanado por dentro que determina la dirección de medición, precisa de un auxiliar de giro costoso con el que el perno sea girado siempre en la dirección de carga.
Por el documento DE 33 40 438 C2 es conocida una disposición de medición para mediciones de fuerza en un soporte de un objeto de pesaje. Esta disposición de medición incluye igualmente un perno de medición de fuerza, que contiene al menos dos perforaciones continuas perpendiculares al eje longitudinal y simétricas respecto a una pieza central, en cuyas superficies de pared interior son aplicadas galgas extensométricas opuestas con las que puede ser detectada una carga del perno de medición de fuerza. Dado que este perno de medición de fuerza está montado de forma giratoria entre una horquilla y un bloque de soporte de tipo pinza, pueden ser medidas con él también fuerzas de peso que no estén alineadas verticalmente, lo que, sin embargo, conduce a un error de ángulo.
Otro perno de medición de fuerza es conocido por el documento DE 25 18 548 C3, el cual está previsto en particular para la medición de la fuerza de cabos de barcos. Este perno de medición está dispuesto de forma giratoria en la dirección de tracción entre un soporte del cabo y un gancho del cabo. En este caso, el perno de medición de fuerza está realizado como una varilla redonda de una sola pieza, en cuya parte central está montado giratorio el soporte de cabo y en cuyas zonas finales colindantes lo está el gancho del cabo. Entre estos dos puntos de apoyo por un sector rectangular de una ranura periférica se crea una zona de deformación en la que dos sectores superficiales opuestos están aplanados. En estos sectores de superficie planos opuestos son aplicadas en total ocho galgas extensométricas opuestas como receptores de fuerza de cizallamiento. En el caso de una carga del cabo el perno de medición se alinea en correspondencia con la dirección de la tracción y detecta esta a través del receptor de fuerza de cizallamiento. Sin embargo, en el perno de medición ya conocido se produce un error de medición cuando las zonas deformación rectangulares no siempre están orientadas en la dirección de medición.
Por el documento US 4, 364, 279 es conocido otro perno de medición de fuerza que está realizado como perno redondo de una sola pieza. En este perno de medición de fuerza están previstas cuatro escotaduras en forma de cavidad opuestas axialmente entre los tres lugares de apoyo perpendiculares a la dirección longitudinal que forman sectores superficiales planos paralelos interiores como cuerpos deformación que representan una pared longitudinal. En esta pared longitudinal están dispuestos, respectivamente, dos captadores de fuerza de cizallamiento opuestos, de manera que con un perno de medición de fuerza de este tipo puede ser detectada una carga de fuerza lineal. Para la orientación en la dirección de la carga del perno de medición de fuerza están previstas perforaciones roscadas en la dirección de los cuerpos de deformación, por lo que los elementos de introducción de fuerza y captación de fuerza son fijados en el perno de medición de fuerza, con lo que ya no es posible un giro.
Otro perno de medición de fuerza es conocido por el documento DE 10 2006 047 392.
Por consiguiente, la invención se propone el objeto de mejorar un perno de medición de fuerza del tipo mencionado al principio, de manera que posibilite una medición de fuerza relativamente exacta sin un aseguramiento frente al giro, y esto incluso cuando la dirección de introducción de la fuerza difiera de la dirección de captación de la fuerza.
Este objeto se consigue por la invención indicada en la reivindicación 1. Perfeccionamientos y ejemplos de realización ventajosos de la invención se indican en las reivindicaciones dependientes.
La invención tiene la ventaja de que por el perfil de sección transversal de los sectores de apoyo con las tres elevaciones distribuidas simétricamente siempre puede ser detectada con precisión la carga perpendicular, y de hecho con independencia de la posición de giro del perno de medición de fuerza. Por tanto, un perno de medición de fuerza de este tipo ventajosamente no requiere tampoco un aseguramiento frente al giro adicional para medir una fuerza perpendicular en dirección lineal que sea independiente del ángulo respecto a las cavidades.
La invención tiene además la ventaja de que por las galgas extensométricas dispuestas en las cavidades pueden ser cerrados con estanqueidad hermética los elementos de medición eléctricos sensibles, de manera que el perno de medición de fuerza puede ser empleado incluso en condiciones ambientales desfavorables. Por las cavidades dispuestas en los sectores de apoyo es ventajoso que los sectores de apoyo pueden ser empleados simultáneamente para la introducción de fuerza o para la captación de fuerza, de manera que no es necesario un
espacio de construcción axial separado entre los elementos de introducción de fuerza y los elementos de captación de fuerza, y por ello pueden ser realizados pernos de medición de fuerza compactos de construcción reducida.
Por las cavidades desplazadas simétricamente respecto al eje longitudinal en el elemento de apoyo, la invención tiene la ventaja de que incluso en caso de fuerzas nominales pequeñas a través de los elementos de apoyo que se atirantan perpendicularmente por dentro, el perno de medición de fuerza presenta una resistencia a la rotura relativamente alta, que ofrece una alta seguridad mecánica.
Una realización particular de la invención con dos elementos de apoyo dispuestos en los extremos tiene la ventaja de que estos se puede utilizar como pernos montados por dos lados para la medición del peso en dispositivos de pesaje que cuelgan libremente o en instalaciones de máquinas expuestas al cizallamiento para la medición de carga, sin que exista dependencia de la posición de giro del perno de medición de fuerza. En este caso tanto los elementos de apoyo como el vástago puede ser realizados con una construcción casi circular, de manera que ambas piezas pueden ser dispuestas ventajosamente de forma giratoria en apoyos de giro, por lo que también en caso de giro del perno de medición de fuerza sigue siendo posible una medición exacta de la fuerza.
Otra realización particular de la invención de tipo tornillo tiene la ventaja de que puede ser empleada como un tornillo convencional en zonas potencialmente peligrosas de la máquina para de forma fácil detectar cargas perpendiculares admisibles o inadmisibles por medio de un elemento de apoyo entre la cabeza del tornillo y la rosca.
La invención se explicará con más detalle utilizando un ejemplo de realización que está representado en el dibujo. Muestran:
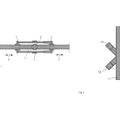
Fig. 1, un alzado lateral de un perno de medición de fuerza con un vástago central y dos sectores de apoyo en los extremos, en una representación en sección parcial;
Fig. 2, una representación en sección como vista frontal de un sector de apoyo;
Fig. 3, un fragmento A representado a escala ampliada como vista frontal con una cavidad y elevación opuesta;
Fig. 4, una representación esquemática de la vista frontal de un perno de medición de fuerza con un anillo de apoyo y vectores de introducción de fuerza y de absorción de fuerza, Fig. 5, un perno de medición de fuerza de tipo tornillo con un vástago y un sector de apoyo por el extremo, y Fig. 6, una representación en sección del perno de medición de fuerza de tipo tornillo.
En la Fig. 1 del dibujo está representado un perno de medición de fuerza con un vástago central 1 y dos sectores de... [Seguir leyendo]
Reivindicaciones:
1. Perno de medición de fuerza que comprende en la dirección longitudinal axial al menos un vástago (1) para la absorción de fuerza o la introducción de fuerza y axialmente adyacente a él al menos un sector de apoyo (2) aproximadamente redondo para introducir fuerza o para absorber fuerza, en el que la fuerza (F) que se va a medir es introducida perpendicularmente a la dirección longitudinal, en el que están previstas en el sector de apoyo (2) redondo varias cavidades (4) con galgas extensométricas (5) aplicadas en su interior, caracterizado por que el sector de apoyo redondo (2) presenta tres elevaciones (3) redondeadas desplazadas tangencialmente 120º y que por dentro en el sector de apoyo (2) están previstas tres cavidades (4) desplazadas tangencialmente 120º que en la dirección longitudinal se extienden simétricas y paralelas a las elevaciones (3) y cuyas zonas de unión radiales forman cuerpos de deformación (17) , en cuyas superficies laterales interiores (10) está aplicada, respectivamente, al menos una galga extensométrica (5) como captador de la tensión de flexión.
2. Perno de medición de fuerza según la reivindicación 1, caracterizado por que las tres cavidades (4) atraviesan axialmente el sector de apoyo (2) , están dispuestas paralelas una junto a otra y separadas entre sí por nervios transversales (18) y tienen una superficie final (9) plana que se extiende perpendicularmente a la dirección longitudinal.
3. Perno de medición de fuerza según la reivindicación 1 o 2, caracterizado por que las cavidades (4) presentan una sección transversal con forma elíptica o de riñón, extendiéndose la superficie lateral interior plana (10) de cada cavidad (4) aproximadamente paralela a la superficie lateral exterior (11) del perno de medición de fuerza.
4. Perno de medición de fuerza según una de las reivindicaciones anteriores, caracterizado por que los sectores de apoyo (2) presentan un perfil de sección transversal casi redondo que comprende levas (3) desplazadas 120º alrededor del eje longitudinal (8) como elevaciones que se elevan al menos de 3 μm hasta 3 mm respecto a una sección transversal circular.
5. Perno de medición de fuerza según una de las reivindicaciones anteriores, caracterizado por que dentro de las cavidades (4) en cada caso en una superficie lateral interior (10) dirigida radialmente hacia fuera está aplicada al menos una galga extensométrica (5) simétricamente respecto de una línea que representa un eje de simetría (12) de la sección transversal de la cavidad y en su superficie lateral exterior (11) opuesta está dispuesta la leva (3) .
6. Perno de medición de fuerza según una de las reivindicaciones anteriores, caracterizado por que el sector de apoyo (2) está montado en un manguito de apoyo circular (13) o en un anillo de apoyo circular, cuyo diámetro interior corresponde al menos al diámetro exterior del elemento de apoyo (2) , incluyendo las elevaciones (3) .
7. Perno de medición de fuerza según una de las reivindicaciones 1 a 6, caracterizado por que está realizado de forma monolítica y comprende dos sectores de apoyo (2) en los extremos que están unidos por un vástago central (1) , en el que el vástago (1) tiene una sección transversal redonda o poligonal.
8. Perno de medición de fuerza según una de las reivindicaciones 1 a 6, caracterizado por que está realizado de forma monolítica y comprende en la dirección axial una parte de cabeza hueca (15) , un sector de apoyo (2) y un vástago redondo (1) con una rosca externa (16) .
Patentes similares o relacionadas:
Aparato de sensor de galga extensométrica y método de instalación asociado, del 3 de Junio de 2020, de Taiwan Hodaka Industrial Co., Ltd: Método de instalación para instalar un aparato de sensor de galga extensométrica con una ubicación de instalación en una bicicleta eléctrica , donde […]
Célula de pesaje para una balanza, del 25 de Diciembre de 2019, de Bizerba SE & Co. KG: Célula de pesaje para una balanza con un cuerpo de medición conformado monolíticamente , que presenta una sección de absorción de fuerza , una sección de aplicación […]
Célula de carga con protección contra sobrecargas, del 11 de Diciembre de 2019, de YAMATO SCALE CO., LTD.: Una célula de carga que es una célula de carga de tipo Roberval, que comprende: una sección de brazo superior que se extiende horizontalmente; una sección […]
Dispositivo de medición de fuerza, del 20 de Noviembre de 2019, de GTM Testing and Metrology GmbH: Dispositivo de medición de fuerza con un transductor de fuerza que presenta una zona de aplicación de fuerza y una zona de medición de fuerza […]
Dispositivo para la medición de fuerza en el rodamiento mediante capa de sensor, del 9 de Octubre de 2019, de Schaeffler Technologies AG & Co. KG: Cojinete de medición , en el que el cojinete de medición presenta un rodamiento , al menos un anillo de introducción de fuerza y un espacio de […]
 Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
Sensor de una característica física, que comprende preferentemente una estructura multicapas, del 11 de Septiembre de 2019, de CPC Technology: Sensor de una característica física, que comprende una estructura multicapa que comprende: - al menos una capa eléctricamente conductora, que comprende unas nanocargas […]
 Dispositivo de estimulación magnética que comprende una resistencia sensible a la fuerza, del 28 de Agosto de 2019, de Axilum Robotics (Société par Actions Simplifiée): Un dispositivo de resistencia sensible a la fuerza (FSR, Force Sensitive Resistor), compatible con una bobina de estimulación magnética y configurado y previsto para […]
Dispositivo de estimulación magnética que comprende una resistencia sensible a la fuerza, del 28 de Agosto de 2019, de Axilum Robotics (Société par Actions Simplifiée): Un dispositivo de resistencia sensible a la fuerza (FSR, Force Sensitive Resistor), compatible con una bobina de estimulación magnética y configurado y previsto para […]