Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículos.
Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículo,
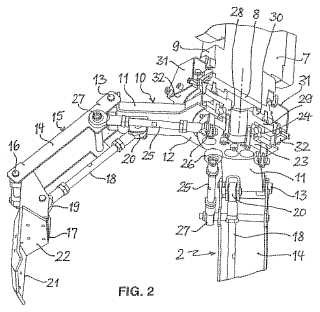
con un robot demanipulación que presenta una mano robótica móvil sobre varios ejes con una brida accionable de manera giratoria,y con una pinza colocada en la mano robótica que presenta un cuerpo de base y al menos dos brazos de pinzamóviles de manera radial al eje medio de la pinza, estando los brazos de pinza acoplados a un dispositivosincronizador que sincroniza el movimiento radial de los brazos de pinza, en el cual el dispositivo sincronizadorpresenta un disco (23) montado en el elemento de base (10) de la pinza (2) y giratorio sobre su eje central yaccionado giratoriamente mediante un motor y elementos de acoplamiento (25) fijados al disco (23) y a los brazos depinza (15) mediante articulaciones (26, 27), de tal manera que un giro del disco (23) produce un movimiento radialsincronizado de los brazos de pinza (15), caracterizado porque el cuerpo de base (10) de la pinza (2) es fijado a labrida (8) accionable giratoriamente de la mano robótica (7) y porque el disco (23) montado de manera giratoria en elcuerpo de base (10) es accionable giratoriamente mediante un motor (35) separado fijado al cuerpo de base.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07120731.
Solicitante: SCHENCK ROTEC GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LANDWEHRSTRASSE 55 64293 DARMSTADT ALEMANIA.
Inventor/es: ROGALLA, MARTIN, LEHR,WERNER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › con tres o más elementos en forma de dedos.
- B60C25/05 B […] › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › B60C 25/00 Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02). › Máquinas.
- B60C25/132 B60C 25/00 […] › para montar y desmontar los neumáticos (únicamente para posicionar los talones sobre la llanta B60C 25/12; únicamente para despegar los talones de la llanta B60C 25/125).
PDF original: ES-2410600_T3.pdf
Fragmento de la descripción:
Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículos.
La invención se refiere a un dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículo, con un robot de manipulación que presenta una mano robótica móvil sobre varios ejes con una brida accionable de manera giratoria, y con una pinza colocada en la mano robótica que presenta un cuerpo de base y al menos dos brazos de pinza móviles de manera radial al eje medio de la pinza, estando los brazos de pinza acoplados a un dispositivo sincronizador que sincroniza el movimiento radial de los brazos de pinza.
Por el documento US 6 626 476 B1 se conoce una pinza robótica de clase genérica con un carril, un actuador giratorio y elementos deslizantes que están retenidos de manera móvil sobre el carril y tienen, cada uno, un dedo de pinza. El actuador giratorio tiene un brazo giratorio cuyos extremos están conectados, en cada caso, de tal manera a un elemento deslizante por medio de una barra de acoplamiento y articulaciones que un giro del brazo aproxima o aleja los elementos deslizantes uno del otro de manera sincronizada, según el sentido de giro.
Además, por el documento DE 35 21 821 A1 se conoce una pinza de un dispositivo manipulador de piezas que se compone de una carcasa de accionamiento de pinzas y una carcasa de engranaje de pinzas que contiene un elemento de acoplamiento accionable giratoriamente y barras de tracción para una acción en sentido opuesto de dos dedos de sujeción. Para ello, los dedos de sujeción están conducidos móviles en guías rectas de la carcasa de engranaje de pinzas.
Además, por el documento JP 53018165 A se conoce una pinza con dedos de pinza móviles paralelamente. Para ello, los dedos de pinza están montados en dos barras de guía dispuestas yuxtapuestas paralelas en una carcasa y móviles de manera sincronizada mediante un accionamiento giratorio acoplado a los dedos de pinza por medio de elementos de acoplamiento y articulaciones.
Un procedimiento para el montaje automático de neumáticos sobre llantas usando un robot de manipulación ha resultado muy ventajoso y es objeto de la solicitud de patente DE 10 2005 030 692.6. Con este procedimiento, la manipulación y el montaje de neumáticos se producen con ayuda de una pinza fijada al brazo pivotante o a la mano robótica del robot de manipulación y que puede agarrar y sujetar el neumático de manera apropiada. En este caso ha resultado ser ventajoso cuando los neumáticos son agarrados por la pinza en el contorno exterior en el sector de la banda de rodadura y cuando el neumático se apoya con un costado en la pinza. Además, es necesario que los dedos o brazos de pinza que rodean el neumático sean aproximados o alejados de manera sincronizada para que los neumáticos agarrados estén siempre en una posición central definida respecto de la pinza y, en consecuencia, también respecto de la mano robótica. Además, ha de ser posible agarrar neumáticos de diferentes diámetros exteriores. Por lo tanto, las pinza debe poder ser aplicada con un intervalo grande de diámetros. A sewr posible, el movimiento de agarre de la pinza debe ser rápida y las fuerzas para la retención de los neumáticos deben ser variables.
Para el cumplimiento de los requerimientos nombrados, la invención tiene el objetivo de crear un dispositivo apropiado del tipo nombrado al comienzo que se destaque por un modo de funcionamiento fiable y una estructura sencilla y económica.
El objetivo es conseguido mediante las características mencionadas en la reivindicación 1. Los perfeccionamientos ventajosos de la invención se indican en las reivindicaciones secundarias.
Según la invención, el dispositivo de sincronización presenta un disco montado en el elemento de base de la pinza y giratorio sobre su eje central y accionado giratoriamente mediante un motor y elementos de acoplamiento fijados al disco y a los brazos de pinza mediante articulaciones, de tal manera que un giro del disco produce un movimiento radial sincronizado de los brazos de pinza, estando el cuerpo de base de la pinza fijado a la brida accionable giratoriamente de la mano robótica y el disco montado de manera giratoria en el cuerpo de base es accionable giratoriamente mediante un motor separado fijado al cuerpo de base. Dicha configuración ofrece la posibilidad de girar la pinza, y con ello el neumático sujetado por la misma, sobre su eje de rotación. Ello es necesario, por ejemplo, cuando para el emparejamiento uniforme el neumático deba ser montado sobre la llanta en una posición angular definida. Entonces, esta función puede ser cumplimentada mediante la ayuda del dispositivo según la invención, estando justificado el mayor coste de construcción porque es posible prescindir de una máquina de emparejar autónoma. Preferentemente, la brida de la mano robótica está provista de un accionamiento de regulación y, mediante el mismo, es móvil a cualesquiera posiciones angulares de giro y enclavable en las posiciones angulares de giro. Además, mediante la configuración según la invención se ha creado con medios sencillos un accionamiento de los brazos de pinza que permite que sea integrado de manera particularmente ventajosa a un robot de manipulación de configuración habitual. El dispositivo de sincronización está compuesto de componentes económicos sencillos y bien apropiados para transmitir las fuerzas de sujeción necesarias. Mediante el uso de elementos de acoplamiento con articulaciones se garantiza un funcionamiento con un desgaste y mantenimiento reducidos.
Además, según la invención, puede estar previsto que cada brazo de pinza tenga dos conectores paralelos que,
cada uno, está conectado pivotante mediante articulaciones giratorias con un extremo al cuerpo de base y con el otro extremo a un dedo de pinza, de tal manera que los conectores formen una guía paralela de los dedos de pinza. De este modo se consigue que, por ejemplo, los dedos de pinza orientados paralelos al eje central de la pinza mantengan su alineación, independientemente del diámetro del neumático agarrado, y se apoyen en la banda de rodadura del neumático. La configuración posibilita, además, un bajo peso de la pinza y evitar problemas de fricción y mantenimiento que estarían relacionados con un guiado recto de los dedos de pinza.
Preferentemente, un conector de los brazos de pinza está respectivamente conectado en cada extremo, por un lado al cuerpo de base y por otro lado a un dedo de pinza, mediante dos articulaciones giratorias coaxiales dispuestas distanciadas una de otra, estando los ejes de las articulaciones giratorias orientadas tangencialmente al eje central de la pinza. Mediante dicha configuración se consigue una conexión rígida a la torsión entre los dedos de pinza y el cuerpo de base de la pinza. Según la invención, los dedos de pinza pueden tener placas de retención paralelas al eje central de la pinza para el contacto con la banda de rodamiento del neumático. Además, puede haber previstas superficies de contacto dispuestas en un plano radial común para el apoyo de los dedos de pinza en el costado de los neumáticos.
De acuerdo con otra propuesta de la invención puede estar previsto que el recorrido de cierre generado por un accionamiento para el giro del disco para ejercer presión de los dedos de pinza sobre un neumático sujetado por los mismos, sea ajustable. Mediante el recorrido de cierre, la fuerza de cierre puede estar limitada a la magnitud permitida para el tamaño del neumático respectivo.
A continuación, la invención se explica en detalle mediante los ejemplos de realización representados en el dibujo. Muestran:
La figura 1, una vista lateral de un dispositivo para el montaje de neumáticos según la invención,
la figura 2, un detalle de la pinza del dispositivo según la figura 1, parcialmente seccionado,
la figura 3, una vista de la pinza según la figura 2 en una posición abierta,
la figura 4, una vista de la pinza según la figura 2 en una posición cerrada,
la figura 5, otra forma de realización de una pinza para un dispositivo según la invención.
El dispositivo mostrado en la figura 1 comprende un robot de manipulación 1 y una pinza 2, movible por el mismo, que se usa para agarrar y retener neumáticos en el montaje sobre una llanta. El robot de manipulación 1 se compone de una estructura de base fija 3 sobre la que gira sobre un eje vertical A1 un carrusel 4 con una biela oscilante 5, un brazo 6 y una mano robótica 7. La biela oscilante 5 es giratoria en el carrusel 4 sobre un eje horizontal A2 y el brazo 6 es giratorio en la biela oscilante 5 sobre un eje horizontal A3. El brazo 6 se compone de dos partes que son giratorias una respecto de... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para el montaje de un neumático sobre una llanta de una rueda de vehículo, con un robot de manipulación que presenta una mano robótica móvil sobre varios ejes con una brida accionable de manera giratoria, y con una pinza colocada en la mano robótica que presenta un cuerpo de base y al menos dos brazos de pinza 5 móviles de manera radial al eje medio de la pinza, estando los brazos de pinza acoplados a un dispositivo sincronizador que sincroniza el movimiento radial de los brazos de pinza, en el cual el dispositivo sincronizador presenta un disco (23) montado en el elemento de base (10) de la pinza (2) y giratorio sobre su eje central y accionado giratoriamente mediante un motor y elementos de acoplamiento (25) fijados al disco (23) y a los brazos de pinza (15) mediante articulaciones (26, 27) , de tal manera que un giro del disco (23) produce un movimiento radial
sincronizado de los brazos de pinza (15) , caracterizado porque el cuerpo de base (10) de la pinza (2) es fijado a la brida (8) accionable giratoriamente de la mano robótica (7) y porque el disco (23) montado de manera giratoria en el cuerpo de base (10) es accionable giratoriamente mediante un motor (35) separado fijado al cuerpo de base.
2. Dispositivo según la reivindicación 1, caracterizado porque la brida (8) de la mano robótica (7) es movible con ayuda de un accionamiento de regulación a cualquier posición angular de giro y enclavable en la misma.
3. Dispositivo según una de las reivindicaciones precedentes, caracterizado porque cada brazo de pinza (15) tiene dos conectores (14, 18) paralelos que, cada uno, está conectado pivotante mediante articulaciones giratorias (13, 16, 19, 20) con un extremo al cuerpo de base (10) y con el otro extremo a un dedo de pinza (17) , de tal manera que los conectores (14, 18) forman una guía paralela para los dedos de pinza (17) .
4. Dispositivo según la reivindicación precedente, caracterizado porque un conector (14) del brazo de pinza (15) está
conectado en cada extremo con el cuerpo de base (10) y un dedo de pinza (17) mediante dos articulaciones giratorias (13, 16) coaxiales, estando los ejes de las dos articulaciones giratorias (13, 16) coaxiales orientadas tangencialmente al eje central de la pinza (2) .
5. Dispositivo según una de las reivindicación precedentes, caracterizado porque el disco giratorio (23) está montado en el cuerpo de base (10) mediante un rodamiento de bolas con cuatro puntos de contacto.
6. Dispositivo según una de las reivindicación precedentes, caracterizado porque los dedos de pinza (17) presentan placas de retención (21) paralelas respecto del eje central de la pinza (2) para el contacto con la banda de rodamiento de un neumático y superficies de contacto (22) dispuestas en un plano radial común para el apoyo de dedos de pinza en el costado de un neumático.
7. Dispositivo según una de las reivindicación precedentes, caracterizado porque el recorrido de cierre de los dedos 30 de pinza (17) es ajustable.
.
Patentes similares o relacionadas:
Aparato para montar y desmontar un neumático, del 10 de Julio de 2019, de NEXION S.p.A: Un aparato para montar y desmontar un neumático que se apoya operativamente sobre una superficie (S) de soporte, que comprende: - una […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 8 de Marzo de 2017, de ANDROID INDUSTRIES LLC: Un método de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende las etapas de: colocar […]
Estación de trabajo de inflado, del 18 de Enero de 2017, de ANDROID INDUSTRIES LLC: Una estación de trabajo de inflado para inflar un conjunto (TW) de neumático-rueda que incluye un neumático (T) montado en una rueda (W), […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 7 de Diciembre de 2016, de ANDROID INDUSTRIES LLC: Un aparato de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende: un miembro […]
 Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
 Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
ÚTIL DESMONTADOR DE NEUMÁTICOS, del 10 de Marzo de 2015, de MARTINEZ CAMPOS,JESUS MARIA: 1. Útil desmontador de neumáticos, el cual es del tipo de útiles desmontadores de neumáticos constituidos por una barra longitudinal metálica que en, al menos, […]
Dispositivo y procedimiento de montaje de un neumático con la ayuda de un robot, del 7 de Mayo de 2014, de SCHENCK ROTEC GMBH: Procedimiento para el montaje de un neumático sobre una llanta de base honda de una rueda de vehículo, en el que el neumático (R) es agarrado […]