Dispositivo de medición de la posición y procedimiento para la medición de la posición.
Instalación de medición de la posición con
- un código (C),
que está constituido por una secuencia de elementos de códigos (C1, C2, C3) dispuestos unos detrás de los otros en la dirección de medición X, en el que varios elementos de códigos (C1, C2, C3) sucesivos forman, respectivamente, una palabra de código (CW) con una información de la posición absoluta;
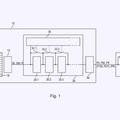
- una instalación de exploración (AE) con una unidad de detector (D) con varios elementos detectores (D1 a D11) para la exploración de los elementos de códigos (C1, C2, C3) que forman, respectivamente, una palabra de código (CW) y para la formación de al menos una señal de exploración analógica (S1A a S3B) dentro de un elemento de código (C1, C2, C3), respectivamente;
- una unidad de evaluación (AW) con instalaciones de evaluación (T1 a T12), en la que, respectivamente, a una de las instalaciones de evaluación (T1 a T12) es alimentada la al menos una señal de exploración (S1A a S3B) de un elemento de código (C1, C2, C3), y con la que se puede formar una información (B1, B2, B3, F) para el elemento de código (C1, C2, C3) correspondiente por medio de al menos un valor de referencia (+V, -V);
caracterizada por al menos una instalación de adaptación (R) para la determinación del valor de referencia (+V, -V) en función de señales de exploración (S1A a S3B) de los elementos de código (C1, C2, C3), en la que los elementos de código (C1, C2, C3) presentan propiedades configuradas complementarias entre sí, y los elementos de código (C1, C2, C3) están configurados y dispuestos de tal manera que al menos sobre la longitud de una zona de exploración respectiva, a partir de la cual se obtiene el valor de referencia (+V, -V), existe una relación al menos aproximadamente igual de estas propiedades diferentes
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08011308.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DR. JOHANNES-HEIDENHAIN-STRASSE 5 83301 TRAUNREUT ALEMANIA.
Inventor/es: MAYER,ELMAR, OBERHAUSER,JOHANN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/244 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
- G01D5/245 G01D 5/00 […] › utilizando un número variable de pulsos en un tren.
PDF original: ES-2523321_T3.pdf
Fragmento de la descripción:
Dispositivo de medición de la posición y procedimiento para la medición de la posición
La invención se refiere a una instalación de medición de la posición para la determinación de la posición absoluta de acuerdo con el preámbulo de la reivindicación 1 así como a un procedimiento para la medición de la posición absoluta de acuerdo con la reivindicación 7.
En muchos campos se emplean cada vez más instalaciones de medición de la posición absoluta, en las que la información de la posición absoluta se deriva de una pista codificada con elementos de código dispuestos unos detrás de los otros en la dirección de la medición. Los elementos del código están previstos en este caso en distribución pseudo-aleatoria, de manera que un número determinado de elementos de código sucesivos forman en cada caso un patrón binario. En el caso de un desplazamiento de la instalación de exploración frente a la pista codificada en un único elemento de código, se forma ya un nuevo patrón binario y está disponible sobre toda la zona de medición a registrar de forma absoluta una secuencia de patrones binarios diferentes.
Un código secuencial de este tipo se designa cono código de cadena o como código pseudo-aleatorio (PRC).
En el documento GB 2 126 444 A se describe una instalación de medición de la posición con un código de este tipo. La información para cada elemento de código de este código se calcula a través de la comparación de la señal de exploración del elemento de código con un valor de referencia predeterminado. Se forma un "0" lógico cuando la señal de exploración se encuentra por debajo del valor de referencia previsto y se forma un "1" lógico cuando la señal de exploración se encuentra por encima del valor de referencia previsto.
Una instalación de posicionamiento con una codificación Manchester se describe en el documento DE 102 44 235 A1. Esta instalación de posicionamiento presenta un código, que está constituido por una secuencia de elementos de código dispuestos unos detrás de los otros en la dirección de medición, estando constituido cada elemento de código de nuevo, respectivamente, por dos zonas parciales, que son complementarias entre si y que están dispuestas de forma sucesiva en la dirección de medición. Este código es explorado por una instalación de exploración por medio de varios elementos de detección. En una instalación de comparación se forma en cada caso a partir de las señales de exploración de las zonas parciales de un elemento de código un resultado de la comparación y se verifica con una instalación de verificación si el resultado de la comparación está por encima o por debajo de un valor de referencia predeterminado fijamente y en función de ello se deriva para el elemento de código correspondiente como información un valor binario "0" o "1". Adicionalmente, se verifica si el resultado de la comparación está dentro o fuera de una zona predeterminada por otro valor de referencia. En función de este resultado de la verificación se deriva otra información para el elemento de código. Si el resultado de la verificación está dentro de la zona predeterminada, se genera una señal de error para el elemento de código correspondiente, que indica que el valor binario derivado de este elemento de codificación no es fiable.
En este caso se predetermina fijamente el valor de referencia para la formación del valor binario. También se predetermina fijamente una vez la zona para la verificación de la fiabilidad del valor binario.
Esto tiene el inconveniente de que en el caso de una reducción de las amplitudes de las señales de exploración analógicas durante el funcionamiento se generan cada vez más señales erróneas.
Una instalación de medición de la posición con un código en serie o bien secuencial se describe también en el documento JP 1-318920 A. El código está constituido por dos pistas de códigos dispuestas paralelas entre sí. Una de estas pistas de códigos presenta una secuencia, dispuesta en la dirección de medición, de elementos de códigos, que forman sobre toda la zona de medición patrones binarios diferenciables unívocamente entre sí. Los elementos de código de la segunda pista de código dispuesta adyacente están configurados inversamente a los elementos de código de la primera pista de código y se calcula un bit "0" o "1" de un elemento de código, respectivamente, a través de la formación de la diferencia de los elementos de código adyacentes entre sí y configurados inversos entre sí.
En el documento EP 0 841 538 B1 se publica una medida para adaptar el umbral de comparación para las señales de exploración del código en serie a las condiciones del entorno. A tal fin, está previsto un detector, que explora un lugar por encima del código secuencial y suministra una señal, con la que se adapta el umbral de comparación.
En este caso es un inconveniente que los estados detectados a través de este detector adicional no corresponden a los estados en el lugar del código y, por lo tanto, se pueden producir interpretaciones erróneas de los elementos de código.
Por lo tanto, la invención tiene el cometido de crear una instalación de medición de la posición absoluta, con la que se genera una posición absoluta correcta con alta fiabilidad y en la que la disponibilidad y la fiabilidad son muy altas.
Este cometido se soluciona por medio de las características de la reivindicación 1.
La invención tiene, además, el cometido de indicar un procedimiento para la determinación de una posición absoluta, con el que se posibilita una generación lo más libre de errores posible de la posición absoluta.
Este cometido se soluciona con las características de la reivindicación 7.
Un aspecto de la invención es que el código está constituido por una secuencia irregular de campos con propiedades inversas entre sí (por ejemplo, campos transparentes y no transparentes o campos magnéticos y no magnéticos) y en este caso cada elemento de código se forma solamente por un único campo. Entonces la instalación de medición de la posición presenta las siguientes características:
un código, que está constituido por una secuencia de elementos de códigos dispuestos unos detrás de los otros en la dirección de medición X, en el que varios elementos de códigos sucesivos forman, respectivamente, una palabra de código con una información de la posición absoluta;
una instalación de exploración con una unidad de detector con varios elementos detectores para la exploración de los elementos de códigos que forman, respectivamente, una palabra de código y para la formación de al menos una señal de exploración analógica dentro de un elemento de código, respectivamente;
una unidad de evaluación con Instalaciones de evaluación, en la que, respectivamente, a una de las Instalaciones de evaluación es alimentada la al menos una señal de exploración de un elemento de código, y con la que se puede formar una Información para el elemento de código correspondiente a través de la comparación de la señal de exploración con al menos un valor de referencia, en el que a partir de la información de la pluralidad de elementos de código explorados se puede derivar la información de la posición absoluta;
al menos una instalación de adaptación para la determinación del valor de referencia en función de al menos una de las señales de exploración de los elementos de código.
El procedimiento que debe realizarse con ello se define en este caso a través de las siguientes etapas del procedimiento:
exploración de un código, que está constituido por una secuencia de elementos de código dispuestos unos detrás de los otros en la dirección de medición, en el que varios elementos de código sucesivos forman, respectivamente, una palabra de código con una posición absoluta;
generación de al menos una señal de exploración analógica dentro de cada elemento de código explorado;
comparación de la señal de exploración con al menos un valor de referencia, y formación de una información para el elemento de código respectivo en función de ello, y
determinación del valor de referencia en función de al menos una de las señales de exploración de los elementos de código.
En este caso, el valor de referencia es un umbral de disparo y se verifica a través de la comparación si la amplitud momentánea de la señal de exploración está por encima o por debajo del umbral de disparo. En función de ello se asocia al elemento de código correspondiente el valor digital "0" o "1" como información.
Otro aspecto de la invención es que el código está constituido por una secuencia de... [Seguir leyendo]
Reivindicaciones:
1.- Instalación de medición de la posición con
un código (C), que está constituido por una secuencia de elementos de códigos (C1, C2, C3) dispuestos unos detrás de los otros en la dirección de medición X, en el que varios elementos de códigos (C1, C2, C3) sucesivos forman, respectivamente, una palabra de código (CW) con una información de la posición absoluta;
una instalación de exploración (AE) con una unidad de detector (D) con varios elementos detectores (D1 a D11) para la exploración de los elementos de códigos (C1, C2, C3) que forman, respectivamente, una palabra de código (CW) y para la formación de al menos una señal de exploración analógica (S1A a S3B) dentro de un elemento de código (C1, C2, C3), respectivamente;
una unidad de evaluación (AW) con instalaciones de evaluación (T1 a T12), en la que, respectivamente, a una de las instalaciones de evaluación (T1 a T12) es alimentada la al menos una señal de exploración (S1A a S3B) de un elemento de código (C1, C2, C3), y con la que se puede formar una información (B1, B2, B3, F) para el elemento de código (C1, C2, C3) correspondiente por medio de al menos un valor de referencia (+V, -V); caracterizada por al menos una instalación de adaptación (R) para la determinación del valor de referencia (+V, -V) en función de señales de exploración (S1A a S3B) de los elementos de código (C1, C2, C3), en la que los elementos de código (C1, C2, C3) presentan propiedades configuradas complementarias entre sí, y los elementos de código (C1, C2, C3) están configurados y dispuestos de tal manera que al menos sobre la longitud de una zona de exploración respectiva, a partir de la cual se obtiene el valor de referencia (+V, -V), existe una relación al menos aproximadamente igual de estas propiedades diferentes.
2.- Instalación de medición de la posición de acuerdo con la reivindicación 1, caracterizada porque
cada elemento de código (C1, C2, C3) está constituido por dos zonas parciales (C1 A, C1B; C2A, C2B; C3A. C3B), que son complementarios entre sí;
la unidad de detector (D) está configurada para la exploración de varios elementos de código (C1, C2, C3) y para la formación de al menos una señal de exploración (S1A a S3B) dentro de cada zona parcial (C1A, C1B; C2A, C2B; C3A, C3B) de los elementos de código (C1, C2, C3) explorados;
respectivamente, a una de las instalaciones de evaluación (T1 a T12) son alimentadas las señales de exploración (S1A a S3B) de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de un elemento de código (C1, C2, C3), de manera que con la instalación de evaluación (T1 a T12) se puede verificar si un resultado de la comparación, respectivamente, de las señales de exploración (S) de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de un elemento de código (C1, C2, C3) se encuentra por encima o por debajo del al menos un valor de referencia (+V, -V) y con la que se puede formar en función de ello la información (B1, B2, B3, F) para el elemento de código (C1, C2, C3) correspondiente.
3.- Instalación de medición de la posición de acuerdo con la reivindicación 2, caracterizada porque la instalación de evaluación (T1 a T12) está instalada para la formación de la diferencia de las señales de exploración (S1A a S3B) de las dos zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de un elemento de código (C1, C2, C3).
4.- Instalación de medición de la posición de acuerdo con una de las reivindicaciones anteriores 2 a 3, caracterizada porque la instalación de evaluación (T1 a T12) está diseñada para emitir como información una señal de error (F), cuando la diferencia de las señales de exploración (S1A a S3B) de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de un elemento de código (C1, C2, C3) está dentro de una zona definida por al menos un valor de referencia (+V, -V).
5.- Instalación de medición de la posición de acuerdo con una de las reivindicaciones anteriores 2 a 4, caracterizada porque las dos zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de un elemento de código (C1, C2, C3) poseen propiedades ópticas complementarias entre sí.
6.- Instalación de medición de la posición de acuerdo con una de las reivindicaciones anteriores, caracterizada porque a la instalación de adaptación (R) se alimentan al menos las señales de exploración (S1A a S3B) de elementos de códigos sucesivos (C1, C2, C3), que forman una palabra de código (CW) y el valor de referencia (+V, -V) es proporcional a la suma de las amplitudes de estas señales de exploración (S1A a S3B).
7.- Procedimiento para la medición de la posición absoluta con las siguientes etapas del procedimiento
exploración de un código (C), que está constituido por una secuencia de elementos de código (C1, C2, C3) dispuestos en la dirección de medición X, en el que varios elementos de código (C1, C2, C3) sucesivos forman, respectivamente, una palabra de código (CW) con una posición absoluta;
generación de al menos una señal de exploración (S1A a S3B) dentro de cada uno de los elementos de código (C1, C2, C3) explorados;
formación de una Información (B1, B2, B3, F) para el elemento de código (C1, C2, C3) respectivo a partir de al menos una señal de exploración (S1A a S3B) por medio de al menos un valor de referencia (+V, -V), caracterizado por la
determinación del valor de referencia (+V, -V) en función de señales de exploración (S1A a S3B) de los elementos de código (C1, C2, C3), en la que el valor de referencia (+V, -V) se determina a partir de la suma de las señales de exploración analógicas de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de varios elementos de códigos (C1, C2, C3).
8.- Procedimiento de acuerdo con la reivindicación 7, caracterizado por
la comparación de la señal de exploración (S1A a S3B) con al menos un valor de referencia (+V, -V) y formación de una información (B1, B2, B3, F) para el elemento de código (C1, C2, C3) respectivo en función de ello.
9.- Procedimiento de acuerdo con la reivindicación 7 ó 9, caracterizado por
la exploración de varios elementos de código (C1, C2, C3), que están constituidos, respectivamente, por dos zonas parciales (C1 A, C1B; C2A, C2B; C3A. C3B), que son complementarias entre sí;
la generación de al menos una señal de exploración (S1A a S3B) dentro de cada zona parcial (A, B) de estos elementos de código (C1, C2, C3);
la formación, respectivamente, de un resultado de la comparación a través de la comparación de las señales de exploración (S1A a S3B) de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B), respectivamente, de un elemento de código (C1, C2, C3) entre sí;
la verificación de su el resultado de la comparación está por encima o por debajo de al menos un valor de referencia (+V, -V), y la formación de la información para el elemento de código (C1, C2, C3) respectivo en función de ello.
10.- Procedimiento de acuerdo con la reivindicación 9, caracterizado porque la comparación es una formación de la diferencia de las señales de exploración analógicas (S1A a S3B) de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B).
11.- Procedimiento de acuerdo con la reivindicación 10, caracterizado porque como información para el elemento de código respectivo se forma una señal de error (F), cuando la diferencia de las señales de exploración de las zonas parciales (C1A, C1B; C2A, C2B; C3A. C3B) de este elemento de código (C1, C2, C3) está dentro de una zona predeterminada por al menos un valor de referencia (+V, -V).
Patentes similares o relacionadas:
Sistema y proceso para determinar desplazamientos de instrumentos de medición, del 10 de Junio de 2020, de PSC Engineering S.r.l: Sistema para determinar y restar desplazamientos (δ) de instrumentos de medición e instrumentaciones para aplicaciones navales para estabilizar […]
Método de estimación de fase y aparato para el mismo, del 20 de Mayo de 2020, de Novanta Corporation: Aparato para estimación de fase mediante el procesamiento de señales de sensor desde un conjunto de sensores , transportando las señales de sensor colectivamente una fase […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Método de comprobación para un dispositivo optoelectrónico de medida, y dispositivo, del 16 de Octubre de 2019, de FAGOR AUTOMATION S.COOP: Método de comprobación para un dispositivo optoelectrónico de medida, comprendiendo el dispositivo una regla graduada con una pluralidad de marcas distribuidas […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]