Dispositivo robotizado de preparación de superficie por plasma de una pieza termoplástica.
Dispositivo robotizado (1) de preparación de superficie por plasma de una pieza termoplástica (4) que incluye,
por una parte, unos primeros medios de soporte (2) de una pieza termoplástica y, por otra, unos segundos medios de soporte (6) de una antorcha de plasma (5) con boquilla cilíndrica rotativa (8), siendo móviles los primeros y/o los segundos medios de soporte (2, 6) de manera que la antorcha (5) y la pieza (4) tengan un movimiento relativo que permita a la antorcha (5) recorrer una zona de tratamiento (9) de la pieza (4), incluyendo el dispositivo, sobre la antorcha de plasma (5), unos medios (10, 11, 11') de control de la distancia entre la boquilla (8) de la antorcha (5) y la pieza (4), caracterizado por que los medios de control (10) incluyen una varilla calibrada dispuesta axialmente sobre la boquilla (8) de la antorcha de plasma (5), por que el dispositivo incluye un carro móvil (7) en el sentido del eje de la antorcha (5) interpuesto entre la antorcha móvil (5) y los segundos medios de soporte (6) y por que el carro móvil (7) incluye medios de contra-reacción a un desplazamiento en torno a una posición de equilibrio o de tope.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/074040.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI LE GALLO 92100 BOULOGNE-BILLANCOURT FRANCIA.
Inventor/es: KERBIGUET,JEAN-GILLES, POLLET,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B29C59/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B29 TRABAJO DE LAS MATERIAS PLASTICAS; TRABAJO DE SUSTANCIAS EN ESTADO PLASTICO EN GENERAL. › B29C CONFORMACIÓN O UNIÓN DE MATERIAS PLÁSTICAS; CONFORMACIÓN DE MATERIALES EN ESTADO PLÁSTICO, NO PREVISTA EN OTRO LUGAR; POSTRATAMIENTO DE PRODUCTOS CONFORMADOS, p. ej. REPARACIÓN (fabricación de preformas B29B 11/00; fabricación de productos estratificados combinando capas previamente no unidas para convertirse en un producto cuyas capas permanecerán unidas B32B 37/00 - B32B 41/00). › B29C 59/00 Conformación de superficies, p. ej. grabado o estampado en relieve; Aparatos a este efecto. › por tratamiento con plasma.
- H05H1/26 ELECTRICIDAD. › H05 TECNICAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › H05H TECNICA DEL PLASMA (tubos de haz iónico H01J 27/00; generadores magnetohidrodinámicos H02K 44/08; producción de rayos X utilizando la generación de un plasma H05G 2/00 ); PRODUCCION DE PARTICULAS ACELERADAS ELECTRICAMENTE CARGADAS O DE NEUTRONES (obtención de neutrones a partir de fuentes radiactivas G21, p. ej. G21B, G21C, G21G ); PRODUCCION O ACELERACION DE HACES MOLECULARES O ATOMICOS NEUTROS (relojes atómicos G04F 5/14; dispositivos que utilizan la emisión estimulada H01S; regulación de la frecuencia por comparación con una frecuencia de referencia determinada por los niveles de energía de moléculas, de átomos o de partículas subatómicas H03L 7/26). › H05H 1/00 Producción del plasma; Manipulación del plasma (aplicación de la técnica del plasma a reactores de fusión termonuclear G21B 1/00). › Antorchas de plasma.
PDF original: ES-2547686_T3.pdf
Fragmento de la descripción:
Dispositivo robotizado de preparación de superficie por plasma de una pieza termoplástica
La presente invención se refiere a un dispositivo robotizado de preparación de superficie por plasma de una pieza termoplástica, según la reivindicación 1, en particular en el contexto de la preparación de superficie de las zonas de pegado de piezas termoplásticas utilizadas en la industria del automóvil.
Para la preparación de superficie por plasma de los termoplásticos (zona de pegado) robotizada, conviene tener controlada con precisión la distancia entre la boquilla de antorcha de plasma y la superficie de la pieza que se va a tratar para garantizar una debida tensión superficial, que es un requisito indispensable para la correcta adhesión de la imprimación y de la cola sobre este tipo de material. Ahora bien, en el contexto de una solución automatizada consistente en embarcar, en un robot de manipulación, la pieza que se va a tratar, y pasarla a gran velocidad bajo la antorcha de plasma, hay considerables riesgos de dispersión ligados a este tipo de proceso robotizado.
El documento US 2008/0134970 A1 describe un dispositivo robotizado de preparación de superficie por plasma de una pieza termoplástica según el preámbulo de la reivindicación 1.
Es el propósito de la Invención solucionar este problema y llevar a la práctica soluciones de control / medida de manera dinámica cuando las tolerancias de dispersión son muy estrechas y el proceso no permite cumplir con ellas y/o el material que se va a tratar lo requiere.
La invención alcanza su propósito merced a un dispositivo robotizado de preparación de superficie por plasma de una pieza termoplástica que Incluye, por una parte, unos primeros medios de soporte de una pieza termoplástica y, por otra, unos segundos medios de soporte de una antorcha de plasma con boquilla cilindrica rotativa, siendo móviles los primeros y/o los segundos medios de soporte de manera que la antorcha y la pieza tengan un movimiento relativo que permita a la antorcha recorrer una zona de tratamiento de la pieza, incluyendo el dispositivo, sobre la antorcha de plasma, unos medios de control de la distancia entre la boquilla de la antorcha y la pieza, caracterizado por que los medios de control Incluyen una varilla calibrada dispuesta axialmente sobre la boquilla de la antorcha de plasma, lo cual permite una solución mecánica simple, ventajosamente asociada con unos medios de contra-reacción comentados seguidamente para garantizar el apoyo de la varilla calibrada sobre la pieza, por que el dispositivo Incluye un carro móvil en el sentido del eje de la antorcha, interpuesto entre la antorcha móvil y los segundos medios de soporte (especialmente un pescante) y por que el carro móvil incluye unos medios de contrareacción a un desplazamiento en torno a una posición de equilibrio o de tope, en orden a retornar el carro, y por tanto la antorcha, hacia esa posición de equilibrio o de tope.
Merced a estos medios, es posible tener controlada la distancia entre la herramienta y la pieza de manera dinámica y/o controlar en línea el 100% de las piezas para garantizar una correcta calidad de preparación, facilitar el ajuste y prevenir y corregir las ocasionales derivas en producción.
De acuerdo con otras características de la invención, consideradas por separado o combinadas:
- los primeros medios de soporte (o los segundos medios de soporte) están constituidos por un robot de manipulación, especialmente con brazo articulado,
- los segundos medios de soporte (o los primeros medios de soporte) se constituyen a partir de un pescante fijo,
- el carro móvil incluye medios motorizados de desplazamiento de la antorcha en el sentido de su eje, lo cual permite en algunas formas de realización corregir en tiempo real las ocasionales derivas observadas mediante la medición de distancia entre la antorcha y la pieza,
- los medios de control incluyen una varilla calibrada dispuesta axialmente sobre la boquilla de la antorcha de plasma,
- la varilla calibrada incluye en su extremo una bola enjaulada, de manera que no deje marcas en la pieza que recorre y sobre la cual se halla en constante giro la boquilla de antorcha, pudiendo tal varilla calibrada estar montada por enroscado o por engatillado desmontable dentro de la boquilla de antorcha, lo cual permite escoger una varilla calibrada de longitud adaptada y cambiar de esta a voluntad.
Otras características y ventajas de la invención se desprenderán de la siguiente descripción de un ejemplo de realización. Se hará referencia a los dibujos que se acompañan, en los cuales:
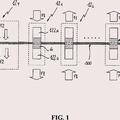
La figura 1 es una vista esquemática de un dispositivo conforme a la invención.
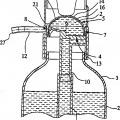
La figura 2 es una vista a escala ampliada del detalle A de la figura 1.
La figura 3 es una vista detallada de la antorcha de plasma del dispositivo de la invención, equipada con una primera forma de realización del sistema de control de distancia.
La figura 4 es un detalle del montaje del sistema de control de distancia en el extremo de la antorcha de plasma.
La figura 5 es un detalle de la antorcha de plasma del dispositivo de la invención, equipada con una segunda forma de realización del sistema de control de distancia, según dos variantes B y C representadas con mayor detalle en las figuras 6 y 7, respectivamente.
Las figuras 1 y 2 representan el dispositivo robotizado de tratamiento de superficie 1; este comprende:
- por una parte, un robot de manipulación 2 con un brazo articulado 3 cuyo extremo es portador de una pieza de trabajo 4, por ejemplo una pieza de vehículo automóvil de material termoplástico moldeado, en el caso concreto que nos ocupa en la aplicación representada un portón trasero termoplástico;
- y, por otra, una antorcha de plasma vertical 5 sustentada en el extremo de un pescante 6, por ejemplo fijado al suelo, por mediación de un carro deslizante según el eje de la antorcha de plasma 5, en este caso vertlcalmente, y centrado en una posición de equilibrio.
La boquilla 8 de la antorcha 5 dirige a la pieza 4 un chorro de plasma que erosiona la pieza a lo largo de una pista 9 definida sobre la pieza 4 por el movimiento del robot de manipulación 2 (se podría evidentemente tener la disposición inversa, con una pieza fija y una antorcha sustentada por el robot de manipulación). En la aplicación perseguida, esta pista 9 corresponde a la zona de pegado de la luneta en el portón trasero termoplástico 4. La boquilla 8 de la antorcha 5 es cilindrica y giratoria sobre su eje vertical.
La invención pretende prever en este dispositivo robotizado unos medios de control de la distancia entre la boquilla 8 de la antorcha 5 y la pieza 4, y ello durante el proceso de trabajo dinámico a gran velocidad.
Según una primera solución representada en las figuras 4 y 5, se ha previsto en el extremo inferior de la boquilla 8 una varilla calibrada 10 coaxial con la boquilla 8, preferentemente desmontable: esta puede ser, por ejemplo, enroscable en el extremo de la boquilla 8. Esta varilla calibrada 10 permite mantener una distancia H con la pieza 4 y, por lo tanto, obviar los problemas de dispersión, ya que la varilla calibrada en contacto con la pieza absorberá las dispersiones de la trayectoria por intermedio del carro móvil 7, al que se puede agregar, de ser necesario, una contra-reacción para evitar la pérdida de contacto de la varilla calibrada 10 vinculada a la antorcha 5 en el recorrido de la pieza 4 bajo la antorcha 5 (vibración por efecto del rozamiento). La varilla calibrada 10 puede estar equipada, a conveniencia, con una bola enjaulada 10' para evitar rayar la pieza 4 debido al giro de la antorcha 5 y a la traslación de la pieza 4 bajo la varilla (véase la figura 4). La varilla calibrada 10, al ser desmontable, es intercambiable y flexible en cuanto a altura o por motivos de desgaste y puede estar dimensionada para adaptarse a cualquier altura de trabajo H necesaria.
Según una segunda forma de realización de los medios de control de la distancia H entre la boquilla 8 de antorcha y la pieza 4, en lugar de la varilla calibrada 10 se integra un sensor láser 11, o comparador, que envía un rayo 12 a la pieza 4 y mide el rayo reflejado en orden a calcular y registrar de manera dinámica la distancia H entre la antorcha 5 y la pieza 4, con o sin el sistema de carro móvil 7, según que se desee o no corregir en tiempo real la distancia entre la antorcha 5 y la pieza 4. Si se desea corregir en tiempo real, el carro 7 se motoriza y se controla automáticamente por intermedio de una interfaz electromecánica con el fin de que sea tratada la consigna del sensor y de que el carro móvil motorizado 7 corrija la posición de la antorcha 5. Si no se puede o no... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo robotizado (1) de preparación de superficie por plasma de una pieza termoplástica (4) que incluye, por una parte, unos primeros medios de soporte (2) de una pieza termoplástica y, por otra, unos segundos medios de soporte (6) de una antorcha de plasma (5) con boquilla cilindrica rotativa (8), siendo móviles los primeros y/o los
5 segundos medios de soporte (2, 6) de manera que la antorcha (5) y la pieza (4) tengan un movimiento relativo que permita a la antorcha (5) recorrer una zona de tratamiento (9) de la pieza (4), incluyendo el dispositivo, sobre la antorcha de plasma (5), unos medios (10, 11, 11') de control de la distancia entre la boquilla (8) de la antorcha (5) y la pieza (4), caracterizado por que los medios de control (10) incluyen una varilla calibrada dispuesta axialmente sobre la boquilla (8) de la antorcha de plasma (5), por que el dispositivo incluye un carro móvil (7) en el sentido del 10 eje de la antorcha (5) interpuesto entre la antorcha móvil (5) y los segundos medios de soporte (6) y por que el carro móvil (7) incluye medios de contra-reacción a un desplazamiento en torno a una posición de equilibrio o de tope.
2. Dispositivo según la reivindicación 1, caracterizado por que los primeros medios de soporte (2) están constituidos por un robot de manipulación.
3. Dispositivo según la reivindicación 1 ó 2, caracterizado por que los segundos medios de soporte (6) se 15 constituyen a partir de un pescante fijo.
4. Dispositivo según una cualquiera de las reivindicaciones 1 a 3, caracterizado por que el carro móvil (7) incluye medios motorizados de desplazamiento de la antorcha (5) en el sentido de su eje.
5. Dispositivo según una cualquiera de las reivindicaciones 1 a 4, caracterizado por que la varilla calibrada incluye en su extremo una bola enjaulada (101).
Patentes similares o relacionadas:
Procedimiento para mejorar la adhesión entre un elemento de refuerzo y un material elastómero de la matriz, del 10 de Abril de 2019, de CONTINENTAL REIFEN DEUTSCHLAND GMBH: Procedimiento para mejorar la adhesión entre un elemento de refuerzo textil, especialmente un elemento de refuerzo que comprende fibras textiles o filamentos textiles […]
Película imprimible, del 21 de Marzo de 2018, de INNOVIA FILMS LIMITED: Un proceso para producir una película imprimible que comprende: a. proporcionar una banda de película; b. en una primera ubicación someter al […]
 Procedimiento para tratar lana semielaborada, del 6 de Enero de 2016, de Olimpias Group S.r.l: Procedimiento para tratar lana semielaborada, caracterizado por que comprende las etapas siguientes:
- proporcionar una cantidad de lana semielaborada ;
- tratar […]
Procedimiento para tratar lana semielaborada, del 6 de Enero de 2016, de Olimpias Group S.r.l: Procedimiento para tratar lana semielaborada, caracterizado por que comprende las etapas siguientes:
- proporcionar una cantidad de lana semielaborada ;
- tratar […]
 Dispositivo dosificador, del 16 de Noviembre de 2015, de Aptar Dortmund GmbH: Dispositivo dosificador para un líquido preferiblemente cosmético,
en el que el dispositivo dosificador presenta o forma una cabeza dosificadora para el […]
Dispositivo dosificador, del 16 de Noviembre de 2015, de Aptar Dortmund GmbH: Dispositivo dosificador para un líquido preferiblemente cosmético,
en el que el dispositivo dosificador presenta o forma una cabeza dosificadora para el […]
Tratamiento superficial de caucho utilizando plasma a baja presión, del 1 de Julio de 2015, de MÜNCH CHEMIE INTERNATIONAL GMBH: Método para tratar una superficie de un objeto que comprende un material de caucho, en el que el objeto es una cámara moldeadora para utilizar en un procedimiento […]
Recubrimientos de superficies, del 17 de Diciembre de 2014, de P2I LTD: Un método de recubrimiento de una superficie con una capa de polímero repelente al aceite y al agua, método que comprende exponer dicha superficie […]
Artículo que contiene poliestireno y poliuretano termoplástico, del 11 de Abril de 2012, de BASF SE: Artículo que contiene poliuretano termoplástico y poliestireno unidos por adhesión, sin promotor de adhesión químico, el cual tiene la siguiente […]
 REVESTIMIENTO SUPERFICIAL, del 4 de Mayo de 2011, de THE SECRETARY OF STATE FOR DEFENCE: Un método de recubrimiento de una superficie con una capa de polímero repelente al aceite y al agua, método que comprende exponer dicha superficie […]
REVESTIMIENTO SUPERFICIAL, del 4 de Mayo de 2011, de THE SECRETARY OF STATE FOR DEFENCE: Un método de recubrimiento de una superficie con una capa de polímero repelente al aceite y al agua, método que comprende exponer dicha superficie […]