Utensilio quirúrgico robótico.
Utensilio quirúrgico robótico, que comprende: un árbol (1) que porta una parte distal (101) y una parteproximal (201);
una muñeca articulada (301) con al menos un grado de libertad con respecto a dicho árbol(1); un efector de extremo (2), que está montado en la parte frontal de la muñeca (301) y está dotado debrazos móviles (102, 202); un soporte de interfaz (3), que está conectado a dicha parte proximal (201) ypuede conectarse a un sistema robótico de instrucción y control del utensilio; y un conjunto de transmisión(11) colocado en dicha muñeca articulada (301) y que comprende una pluralidad de poleas (13a-c, 7a-d,8a-d) colocadas en secuencia y una pluralidad de elementos de activación flexibles, alargados (C1, C2, C3,C3') que pasan alrededor de las poleas (13a- 13c, 7a-7d, 8a-8d) para permitir el movimiento de la muñeca(301) según dicho al menos un grado de libertad y/o el movimiento de al menos uno de dichos brazosmóviles (102, 202); actuando conjuntamente cada uno de dichos elementos de activación flexibles,alargados (C1, C2, C3, C3'), aguas abajo de dicho conjunto de transmisión (11), con dicho efector deextremo (2) y estando dotados los brazos móviles relativos (102, 202), aguas arriba de dicho conjunto detransmisión (11), con al menos un par de extremos libres que pueden conectarse a dos accionadores (23,24) de tal manera que dichos accionadores (23, 24) pueden activar dichos elementos de activaciónflexibles, alargados (C1, C2, C3, C3') independientemente entre sí y llevar a cabo de maneraagonista/antagonista dicho movimiento según dicho al menos un grado de libertad, estando caracterizado elutensilio porque: la muñeca tiene una parte trasera conectada a dicha parte distal (101) y una parte frontalconectada de manera móvil a la parte trasera por medio de dos bandas de conexión laterales (25, 26) paradotar a la muñeca (301) de dicho al menos un grado de libertad; los elementos de activación alargados (C1,C2, C3, C3') se cruzan alrededor de al menos un par de poleas (13a-13c, 7a-7d, 8a-8d) de una manera quedesacopla los ejes de giro de las poleas alrededor de los cuales se cruzan estos elementos alargados;dicha pluralidad de poleas (13a-c, 7a-d, 8a-d) comprenden al menos tres series de poleas (13a-13c, 7a-7d,8a-8d) dispuestas para girar libremente sobre tres pasadores giratorios (14, 9, 10) respectivossustancialmente paralelos entre sí; dichos pasadores (14, 9, 10) comprenden un primer pasador (14) fijadoa dicha parte trasera de la muñeca (301) para el giro de una primera serie de poleas (13a-13c), un segundopasador (9) fijado a primeros extremos de ambas bandas de conexión laterales (25, 26) para el giro de unasegunda serie de poleas (7a-7d), y un tercer pasador (10) fijado a segundos extremos de ambas bandas deconexión laterales (25, 26) para el giro de la tercera serie de poleas (8a-8d); dichos elementos de activaciónflexibles, alargados (C1, C2, C3, C3') comprenden un primer elemento flexible, alargado (C1) fijado, aguasabajo del conjunto de transmisión (11), alrededor de un elemento circular respectivo(402) solidario con unprimer brazo móvil (202) del efector de extremo (2) y que porta, aguas arriba del conjunto de transmisión(11), dos primeras ramificaciones que terminan, cada una, con uno respectivo de dichos extremos libres; ylas dos primeras ramificaciones se cruzan una primera vez alrededor de y entre una primera polea (13a) dedicha primera serie de poleas (13a-13c) y una primera polea (7a) de dicha segunda serie de poleas (7a-7d)y una segunda vez alrededor de y entre la primera polea (7a) de la segunda serie de poleas (7a-7d) y unaprimera polea (8a) de dicha tercera serie de poleas (8a-8d).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11174862.
Solicitante: Surgica Robotica S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via S. Nicolò 30 34121 Trieste ITALIA.
Inventor/es: MORSELLI, MASSIMO, FIORINI,PAOLO, REPPELE,LUCA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
PDF original: ES-2448793_T3.pdf
Fragmento de la descripción:
Utensilio quirúrgico robótico La presente invención se refiere a un utensilio quirúrgico robótico para su uso, en particular, en operaciones quirúrgicas mínimamente invasivas.
Tal como se conoce, los utensilios quirúrgicos robóticos están dotados de un elemento de extremo, denominado a continuación en el presente documento “efector de extremo”, un instrumento que se usa para terminar una o más fases de una operación quirúrgica mínimamente invasiva. Este efector de extremo puede estar formado, por ejemplo, por un elemento de tipo tenazas que comprende un par de brazos móviles.
El documento US6394998B1 describe utensilios o instrumentos quirúrgicos para su uso en operaciones quirúrgicas mínimamente invasivas. Estos instrumentos normalmente están constituidos por una base, por medio de la cual el utensilio se monta de manera retirable en un brazo articulado controlado robóticamente. Un árbol alargado se extiende desde la base. Un extremo de trabajo del árbol está dispuesto de manera distal con respecto a la base. Un elemento de tipo muñeca dotado de uno o dos grado (s) de libertad está montado en este extremo de trabajo. Al menos un efector de extremo está montado de manera giratoria en un extremo opuesto del elemento de tipo muñeca. Una pluralidad de elementos alargados, por ejemplo cables, se extienden desde el efector de extremo y desde el elemento de tipo muñeca para realizar movimientos angulares definidos del elemento de tipo muñeca y del efector de extremo en response a acciones de tracción definidas de los elementos alargados.
Este efector de extremo descrito en dicho documento US6394998B1 comprende un par de elementos de tipo tenaza que pueden hacerse girar juntos o independientemente entre sí por medio de dichos elementos alargados o cables de activación.
El utensilio quirúrgico descrito en dicho documento US6394998B1 tiene diversas desventajas. En primer lugar, cada uno de los cables de activación de cada uno de los elementos del efector de extremo sigue el recorrido de un anillo sin fin: en un lado de este anillo sin fin, este cable se enrolla alrededor de una parte de polea que es solidaria con el elemento relativo del efector de extremo. Cada uno de estos cables de tipo anillo está asociado con un accionador, es decir en última instancia para cada grado de libertad del utensilio hay un accionador para activar el efector de extremo o un elemento del mismo. Esta disposición de los cables en un anillo sin fin no permite que se evalúen correctamente las fuerzas activas en cada ramificación del cable de activación. Otra limitación de esta disposición del utensilio conocido en un anillo sin fin tal como se ha escrito anteriormente es que cuando la herramienta se retira del brazo robótico, los cables de activación en un anillo sin fin permanecen precargados, es decir permanecen en tensión tanto durante el uso normal como (retirados del utensilio) durante el proceso de esterilización. Durante esta última fase, el instrumento se somete a numerosos tratamientos (por ejemplo, tratamientos térmicos y de limpieza) , que podrían alterar los cables de transmisión y la precarga de los mismos.
El documento US2010/082041A1 da a conocer un sistema quirúrgico robótico que usa un sistema de precarga pasivo unido a un tendón que se enrolla alrededor de un cabrestante para controlar la tensión relajada en el tendón. El sistema de precarga pasivo emplea un resorte u otra estructura para aplicar tensión al tendón. El cabrestante se acciona por un motor cuando es necesario tirar del tendón en un elemento estructural del instrumento (efector de extremo) . Por ejemplo, para la aplicación de movimiento o presión de fijación del elemento estructural contra resistencia, la fricción de cabrestante puede producir tensión al tendón que es muchas veces la tensión aplicada al sistema de precarga pasivo. Sin embargo, cuando no es necesario que el tendón aplique fuerza al elemento, el cabrestante puede liberarse, de modo que el sistema de resorte proporciona tensión suficiente para evitar el descarrilamiento u otro mal funcionamiento del tendón. La baja tensión en tendones relajados puede reducir la fricción del tendón, particularmente en instrumentos con árboles flexibles.
El objeto de la presente invención por tanto es proporcionar un utensilio quirúrgico robótico que supere las desventajas de utensilios quirúrgicos robóticos conocidos, tales como por ejemplo el descrito anteriormente, que pueda usarse con capacidad aumentada y con alta eficacia, que permita la medición precisa de la tensión aplicada a cada ramificación del cable, que pueda reconocerse fácilmente por el usuario, que una vez retirado del brazo del sistema de control robótico al que debe conectarse, permita la calibración inmediata y precisa cada vez que vuelve a conectarse a dicho brazo y que pueda someterse por tanto a un proceso de esterilización eficaz sin que sea necesario verificar la precarga de los cables de transmisión. También es plausible que el cable soporte más ciclos de trabajo, puesto que la delta térmica delta de aproximadamente 100°C debido a la esterilización no da lugar a un aumento en la tensión en las ramificaciones del cable.
Este objeto se logra por la presente invención por medio de un utensilio quirúrgico robótico según el especificado en la reivindicación 1.
Características ventajosas adicionales del presente utensilio se presentan en las reivindicaciones dependientes.
El presente utensilio está dotado ventajosamente de una base para la conexión al porta-utensilios, de un árbol alargado situado distalmente con respecto a dicha base, de una muñeca articulada que tiene al menos un grado de libertad, montada en el extremo de trabajo del árbol alargado, y de un efector de extremo conectado a la muñeca
articulada en una posición distal. El sistema de transmisión puede permitir el accionamiento de la muñeca y del efector de extremo, que por ejemplo pueden ser pinzas con dos brazos, en el caso del efector de extremo según al menos un grado de libertad. Cada grado de libertad se efectúa por medio de un par de accionadores, que están colocados en los extremos libres de cada uno de los elementos de activación alargados de manera que dichos elementos alargados pueden activarse de manera agonista/antagonista, lo que posibilita modificar la impedancia y controlar la tensión aplicada a cada ramificación de cada elemento flexible, alargado.
En el conjunto de transmisión, también es ventajoso que estos elementos flexibles, alargados crucen de manera adecuada alrededor de al menos un par de poleas, permitiendo el desacoplamiento de los ejes de giro de dicho par de poleas.
Es importante señalar que el utensilio también está dotado de un sistema de conexión y desconexión para los elementos flexibles, alargados. En cada extremo de desconexión para los elementos flexibles, el sistema está dotado de un elemento elástico para implementar el control eficaz del movimiento agonista/antagonista y para mantener los elementos de transmisión en tensión una vez que se ha desconectado la herramienta. Esta solución hace más fáciles los procesos para cambio y esterilización del utensilio, permitiendo la calibración inmediata del mismo al final de estos procesos.
El presente utensilio también comprende un sistema para comprobar la colocación correcta del árbol en el soporte de interfaz y sistemas de identificación y reconocimiento sencillos y eficaces, tales como un collar que puede tener diversos colores dependiendo del tipo de utensilio, una matriz de marcas de identificación colocada en la herramienta que debe acoplarse cuando está última se inserta en una matriz de recepción en la base del portautensilios, o una etiqueta DataMatrix, en la que se almacenan una serie de datos de serie, de calibración del utensilio y otros.
Características y ventajas adicionales de la presente invención se entenderán más claramente en el transcurso de la siguiente descripción, considerada a modo de ejemplo, no estando implicada limitación, y con referencia a los dibujos adjuntos, en los que:
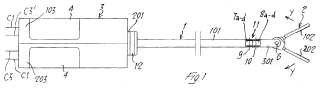
-la figura 1 es una vista desde arriba de un utensilio quirúrgico robótico según la presente invención, que comprende un árbol a cuyo extremo distal está conectado un efector de extremo y cuyo extremo proximal está insertado en un soporte de interfaz para la conexión a un brazo de un sistema robótico de control e instrucción del utensilio;
-la figura 2 es una vista lateral, en una escala ampliada, de la parte distal del árbol donde está colocado un conjunto de transmisión que permite movimientos relativos del efector de extremo con respecto al árbol;
-la figura 3 es una vista desde arriba, parcialmente... [Seguir leyendo]
Reivindicaciones:
1. Utensilio quirúrgico robótico, que comprende: un árbol (1) que porta una parte distal (101) y una parte proximal (201) ; una muñeca articulada (301) con al menos un grado de libertad con respecto a dicho árbol (1) ; un efector de extremo (2) , que está montado en la parte frontal de la muñeca (301) y está dotado de brazos móviles (102, 202) ; un soporte de interfaz (3) , que está conectado a dicha parte proximal (201) y puede conectarse a un sistema robótico de instrucción y control del utensilio; y un conjunto de transmisión (11) colocado en dicha muñeca articulada (301) y que comprende una pluralidad de poleas (13a-c.
7. d.
8. d) colocadas en secuencia y una pluralidad de elementos de activación flexibles, alargados (C1, C2, C3, C3’) que pasan alrededor de las poleas (13a-13c.
7. 7d.
8. 8d) para permitir el movimiento de la muñeca 10 (301) según dicho al menos un grado de libertad y/o el movimiento de al menos uno de dichos brazos móviles (102, 202) ; actuando conjuntamente cada uno de dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) , aguas abajo de dicho conjunto de transmisión (11) , con dicho efector de extremo (2) y estando dotados los brazos móviles relativos (102, 202) , aguas arriba de dicho conjunto de transmisión (11) , con al menos un par de extremos libres que pueden conectarse a dos accionadores (23, 15 24) de tal manera que dichos accionadores (23, 24) pueden activar dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) independientemente entre sí y llevar a cabo de manera agonista/antagonista dicho movimiento según dicho al menos un grado de libertad, estando caracterizado el utensilio porque: la muñeca tiene una parte trasera conectada a dicha parte distal (101) y una parte frontal conectada de manera móvil a la parte trasera por medio de dos bandas de conexión laterales (25, 26) para 20 dotar a la muñeca (301) de dicho al menos un grado de libertad; los elementos de activación alargados (C1, C2, C3, C3’) se cruzan alrededor de al menos un par de poleas (13a-13c.
7. 7d.
8. 8d) de una manera que desacopla los ejes de giro de las poleas alrededor de los cuales se cruzan estos elementos alargados; dicha pluralidad de poleas (13a-c.
7. d.
8. d) comprenden al menos tres series de poleas (13a-13c.
7. 7d.
8. 8d) dispuestas para girar libremente sobre tres pasadores giratorios (14, 9, 10) respectivos25 sustancialmente paralelos entre sí; dichos pasadores (14, 9, 10) comprenden un primer pasador (14) fijado a dicha parte trasera de la muñeca (301) para el giro de una primera serie de poleas (13a-13c) , un segundo pasador (9) fijado a primeros extremos de ambas bandas de conexión laterales (25, 26) para el giro de una segunda serie de poleas (7a-7d) , y un tercer pasador (10) fijado a segundos extremos de ambas bandas de conexión laterales (25, 26) para el giro de la tercera serie de poleas (8a-8d) ; dichos elementos de activación 30 flexibles, alargados (C1, C2, C3, C3’) comprenden un primer elemento flexible, alargado (C1) fijado, aguas abajo del conjunto de transmisión (11) , alrededor de un elemento circular respectivo (402) solidario con un primer brazo móvil (202) del efector de extremo (2) y que porta, aguas arriba del conjunto de transmisión (11) , dos primeras ramificaciones que terminan, cada una, con uno respectivo de dichos extremos libres; y las dos primeras ramificaciones se cruzan una primera vez alrededor de y entre una primera polea (13a) de dicha primera serie de poleas (13a-13c) y una primera polea (7a) de dicha segunda serie de poleas (7a-7d) y una segunda vez alrededor de y entre la primera polea (7a) de la segunda serie de poleas (7a-7d) y una primera polea (8a) de dicha tercera serie de poleas (8a-8d) .
2. Utensilio según la reivindicación 1, caracterizado por que dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) comprenden un segundo elemento flexible, alargado (C2) fijado, aguas abajo 40 del conjunto de transmisión (11) , alrededor del elemento circular respectivo (302) solidario con un segundo brazo móvil (202) del efector de extremo (2) y que porta, aguas arriba del conjunto de transmisión (11) , dos segundas ramificaciones que terminan, cada una, con uno respectivo de dichos extremos libres; las dos segundas ramificaciones se cruzan una primera vez alrededor de y entre una segunda polea (13c) de dicha primera serie de poleas (13a-13c) y una segunda polea (7d) de dicha segunda serie de polea (7a-7d) y una 45 segunda vez alrededor de y entre la segunda polea (7d) de la segunda serie de poleas (7a-7d) y una segunda polea (8d) de dicha tercera serie de poleas (8a-8d) .
3. Utensilio según las reivindicaciones 1 y 2, caracterizado por que dichos elementos flexibles, alargados primero y segundo (C1, C2) pueden conferir al efector de extremo (2) un movimiento de guiñada (Y) con respecto a un pasador giratorio (6) , alrededor del cual pueden girar dichos brazos (102, 202) del efector de 50 extremo (2) .
4. Utensilio según la reivindicación 1, caracterizado por que dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) comprenden un par de terceros elementos flexibles, alargados (C3, C3’) que están conectados, aguas abajo del conjunto de transmisión (11) , a dicha parte frontal de la muñeca (301) y están dotados, aguas arriba del conjunto de transmisión (11) , de extremos libres respectivos conectados a 55 un accionador relativo, pudiendo realizar dicho par de terceros elementos flexibles, alargados (C3, C3’) , por medio del accionador relativo, un movimiento de cabeceo (P) del efector de extremo (2) con respecto a la parte distal (101) del árbol.
5. Utensilio según la reivindicación 4, caracterizado por que dicho par de terceros elementos flexibles, alargados (C3, C3’) se cruzan una primera vez alrededor de y entre una tercera polea (13b) de dicha 60 primera serie de poleas (13a-13c) y una tercera polea (7b) de dicha segunda serie de poleas (7a-7d) y una segunda vez alrededor de una tercera polea (8b) de dicha tercera serie de poleas (8a-8d) , realizándose dicho movimiento de cabeceo (P) con respecto a dicho tercer pasador (10) , que gira a su vez alrededor de dicho segundo pasador (9) según una relación geométrica establecida.
6. Utensilio según la reivindicación 1, caracterizado por que dicho conjunto de transmisión (11) comprende un par de elementos de soporte flexibles, alargados (C4, C4’) para dotar al conjunto de transmisión (11) de un soporte y definir la cinemática y la dinámica del movimiento de cabeceo (P) del efector de extremo (2) con respecto a la parte distal (101) del árbol (1) ; comprendiendo dichos elementos de soporte flexibles, alargados (C4, C4’) extremos traseros respectivos conectados a medios de tensado (33, 34) alojados en dicha parte trasera de la muñeca (301) y extremos frontales respectivos fijados a dicha parte frontal de la muñeca (301) por medio de elementos de fijación respectivos (35, 36) insertados de manera retirable en asientos respectivos (37, 38) formados en la parte frontal de la muñeca (301) .
7. Utensilio según la reivindicación 6, caracterizado por que dichos elementos de soporte flexibles, alargados (C4, C4’) se cruzan alrededor de y entre una cuarta polea (7c) de dicha segunda serie de poleas (7a-7d) y una cuarta polea (8c) de dicha tercera serie de poleas (8a-8d) .
8. Utensilio según la reivindicación 1, caracterizado por que comprende un sistema de conexión y desconexión colocado en dicho soporte de interfaz (3) para conectar y desconectar dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) y para conectar y desconectar el soporte de interfaz (3) al y desde el árbol (1) ; estando dotado el sistema de conexión y desconexión de una primera corredera (42, 42’) , que puede deslizar en un primer asiento relativo (40, 40’) formado en la parte proximal (201) del árbol
(1) y puede engancharse, por medio de un elemento de conexión relativo (43, 43’) , con una segunda corredera (46, 46’) que puede deslizar en un segundo asiento relativo (44, 44’) formado en el soporte de 20 interfaz (3) .
9. Utensilio según la reivindicación 8, caracterizado por que primeros medios de pretensado elástico (39, 39’) para dichas ramificaciones de dicho primer elemento flexible, alargado (C1) , están colocados en dicho primer asiento (40, 40’) de la parte proximal (101) del árbol (1) .
10. Utensilio según la reivindicación 8, caracterizado por que segundos medios de pretensado elástico (47, 47’)
para dichas ramificaciones de dicho primer elemento flexible, alargado (C1) , colocados en dicho segundo asiento (44, 44’) del soporte de interfaz (3) .
11. Utensilio según la reivindicación 1, caracterizado por que comprende medios de medición (41, 41’) para medir la tensión de cada ramificación de dichos elementos flexibles, alargados primero y segundo (C1, C2)
o de cada uno de los terceros elementos flexibles, alargados (C3, C3’) .
12. Utensilio según las reivindicaciones 10 y 11, caracterizado por que dichos medios de medición (41, 41’) están dispuestos al lado de dicho sistema de conexión y desconexión para cada ramificación de dichos elementos flexibles, alargados primero y segundo (C1) o para cada tercer elemento flexible, alargado (C3, C3’) .
13. Utensilio según la reivindicación 1, caracterizado por que comprende al menos un collar de identificación 35 (12) .
14. Utensilio según la reivindicación 1, caracterizado por que comprende un sistema de reconocimiento e identificación basado en una etiqueta DataMatrix, que debe colocarse en cualquier parte del utensilio y puede contener una serie de datos, tal como los datos de identificación de serie del utensilio, los datos de calibración del mismo y otros.
15. Utensilio según la reivindicación 1, caracterizado por que comprende un sistema de reconocimiento (49, 50, 51, 52) para reconocer automáticamente la correcta inserción de la parte proximal (201) del árbol (1) en el soporte de interfaz (3) , basándose dicho sistema en una conexión mecánica en la parte del utensilio que, según el soporte de interfaz (3) , activa una señal eléctrica u óptica o una señal basada en una combinación de dichos tipos.
16. Utensilio según la reivindicación 1, caracterizado por que cada uno de los brazos móviles (102, 202) del efector de extremo (2) está dotado de una conexión eléctrica (27, 28) , por medio de la cual puede conectarse a un conector convencional de un aparato médico apropiado.
17. Utensilio según la reivindicación 1, caracterizado por que comprende un sistema de desmultiplicación de desplazamiento para cada uno de los elementos de activación flexibles, alargados (C1, C2, C3, C3’) ,
comprendiendo dicho sistema de desmultiplicación de desplazamiento elementos giratorios (P1-P1’, P2-P2’, P3-P3’) alrededor de los cuales se enrollan dichos elementos de activación flexibles, alargados (C1, C2, C3, C3’) ; comprendiendo dicho sistema de desmultiplicación de desplazamiento al menos una quinta polea (P1, P1’) fijada a una parte móvil (46) del utensilio y al menos una sexta polea (P2, P2’) conectada a una parte fija (57) del utensilio.
18. Utensilio según la reivindicación 17 cuando es dependiente de la reivindicación 8, caracterizado por que dicha quinta polea (P1, P1’) está conectada a dicha segunda corredera (46, 46’) por medio de un primer pasador de giro (55) y dicha sexta polea (P2, P2’) está conectada a la parte fija (57) por medio de un segundo pasador de giro (56) .
19. Utensilio según la reivindicación 17, caracterizado por que dichos elementos giratorios (P1-P1’, P2-P2’, P3-P3’) están realizados de manera que se mantienen las ramificaciones de los elementos de activación flexibles, alargados (C1, C2, C3, C3’) paralelas entre sí, obteniendo por tanto una ley lineal del desplazamiento desmultiplicado.
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]