Una máquina de encargos para procesamiento automático de pedidos.
Una máquina de encargos para procesamiento automático de pedidos de productos,
con dicha máquina queincluye:
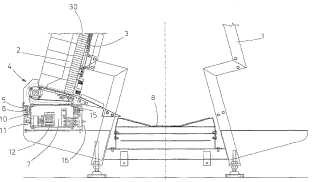
una estructura soporte (1);
una pluralidad de unidades de almacenamiento (2), que se extienden considerablemente en vertical y dispuestasuna junto a otra en al menos una fila, con dichos productos (30) apilados dentro de dichas unidades dealmacenamiento (2);
al menos una guía (5, 15), que se extiende paralela a la máquina y fijada a la estructura soporte (1);
medios eyectores (4) para expulsar dichos productos selectivamente, montados en un carro que se mueve a lolargo de dicha al menos una guía (5, 15), de manera que los medios eyectores se mueven a lo largo de laestructura (1) y en la parte inferior de las unidades de almacenamiento (2), para transportar al menos un medioeyector, el carro que está equipado con medios para la operación y control de los carros y medios de motor (12,14) montados en el carro para mover el carro autónomamente a lo largo de la estructura (1), a lo largo de lalongitud entera de la máquina;
medios de recogida (8) para los productos (30) recogidos de las unidades de almacenamiento;
caracterizada porque la al menos una guía (5, 15) está fijada por debajo de las unidades de almacenamiento (2)y porque una pluralidad de carros (7) se proporciona a lo largo de dicha al menos una guía (5, 15) en amboslados de la estructura (1), todos de dichos carros que están coordinados uno con otro.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/064923.
Solicitante: U.T.I.T. S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA PEROSI 183 41100 MODENA ITALIA.
Inventor/es: ALBORESI, LUIGI, OGNIBENE,FRANCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/137 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › con disposiciones o medios de control automáticos para coger los objetos que deben ser sacados.
PDF original: ES-2399104_T3.pdf
Fragmento de la descripción:
Una máquina de encargos para procesamiento automático de pedidos
Campo de la invención La presente invención se refiere a un dispositivo de encargos para procesamiento automático de pedidos, según el cual diferentes productos de uso extensivo (por ejemplo farmacéuticos, cintas de video y audio, corsetería, ropa interior, cosméticos, etc.) se recogen en contenedores adecuados y distribuyen posteriormente a los delegados.
Antecedentes de la invención Diversos tipos de productos son contenidos normalmente en unidades de almacenamiento de tipo canal vertical respectivas, dispuestas adyacentes una con otra en los lados de una estructura fija.
Las dos filas de unidades de almacenamiento se sitúan una junto a la otra, a menudo inclinadas, para converger hacia arriba.
La estructura así formada normalmente se llama “túnel”.
Una cinta de transporte, situada en el área entre dos filas de unidades de almacenamiento, recibe los productos que caen, los cuales entonces se transportan a un contenedor de recogida, situado en uno de los extremos de la cinta transportadora.
Los medios para la recogida de los productos seleccionados desde las unidades de almacenamiento se sitúan en los lados externos, o por debajo de las filas de unidades de almacenamiento.
El número de diferentes tipos de productos, de los cuales se componen los pedidos, aumenta constantemente, y del mismo modo, la subdivisión de pedidos, es decir la demanda de más pedidos con un número menor de productos.
Estas demandas que surgen del mercado de hoy en día, requieren mayor flexibilidad de los dispositivos para la preparación de pedidos.
Por lo tanto, se han producido sistemas para la preparación automática de pedidos para satisfacer esta necesidad durante muchos años.
Los ejemplos de tales dispositivos se pueden encontrar en los documentos FR 2.696.722 y US 5.271.703.
En ambos dispositivos mencionados, los elementos activos de los medios de expulsión incluyen uno o más miembros móviles, que se deslizan en ambas superficies del túnel definido por las dos filas de unidades de almacenamiento.
El dispositivo descrito en el documento FR 2.696.722 incluye una cinta, que está montada sobre rodillos, situada en los extremos opuestos del túnel, y cuya función es cerrar las partes inferiores de las unidades de almacenamiento, que de esta manera soportan los productos.
La cinta se interrumpe en uno o más puntos y los medios de extracción, montados en carros que se mueven a lo largo de guías, se sitúan entre los extremos de la cinta así obtenidos.
En este sentido, cada vez la cinta se pone en rotación y tira de los medios de extracción moviéndolos por debajo de las unidades de almacenamiento desde las cuales van a ser recogidos los productos.
Las desventajas de esta solución técnica son obvias, porque sí, por un lado, es posible reducir el número de eyectores necesarios para la operación de la máquina, no obstante por otro lado, el tiempo necesario para la preparación de los pedidos se aumenta considerablemente.
El tiempo aumenta todavía más en caso de pedidos con productos de diferentes tipos y pocos artículos para cada tipo.
La adaptación de los eyectores fijos, cada uno de los cuales se dedica solamente a una unidad de almacenamiento, provoca altos costes de construcción de la máquina, debido al gran número de elementos necesarios.
También el mantenimiento es más difícil, dado que el mayor número de dispositivos de operación conduce estadísticamente a un mayor número de malfuncionamientos y consecuentemente, de intervenciones.
Por otra parte, un mayor número de eyectores en movimiento complican la operación de la máquina, dado que llega a ser difícil situar todos los eyectores siempre en una región que corresponde a las unidades de almacenamiento seleccionadas, debido al espacio obvio y los problemas de posicionamiento.
También es de señalar que la colocación de uno de los eyectores limita o incluso impide la correcta colocación de otro eyector, o de otros eyectores.
No es posible usar más cintas de transmisión independientes, porque la cinta debe cerrar la parte inferior de las unidades de almacenamiento.
Según la solución descrita en el documento US 5.271.703, las partes inferiores de las unidades de almacenamiento se cierran por una placa con surcos, la cual se extiende transversalmente desde el eje de la máquina, es decir hacia la cinta de transporte central.
En este caso, los eyectores fijos se usan para productos recogidos más frecuentemente, y uno o más eyectores móviles, accionados por bandas respectivas, para productos recogidos con una frecuencia menor.
Esta solución resuelve parcialmente los problemas anteriormente mencionados, no obstante, permanecen muchas restricciones con respecto a los dispositivos móviles, en cuanto a sus movimientos en relación a los otros eyectores y a la longitud de la máquina.
Realmente, en ambos casos, la carrera del eyector depende de la longitud de las cintas o banda de transmisión, las cuales limitan de esta manera la extensión de la estructura fija, en la que se montan las unidades de almacenamiento.
Unas bandas o cintas excesivamente largas causan colocación que es imprecisa y problemas con su soporte y operación.
Se puede decir de manera general que estos sistemas, un poco como todos los sistemas conocidos, incluyen uno o una serie de módulos, equipados cada uno con sus propios controles electrónicos, y que forman la unidad básica, que define el túnel de preparación.
El movimiento de los carros, que transportan los mecanismos de extracción, está conectado fundamentalmente a cada módulo, cuya longitud está limitada por las bandas de transmisión.
Además, el malfuncionamiento de un carro con un eyector relacionado con un módulo, causa necesariamente la parada del módulo asociado entero, lo cual provoca serias consecuencias en la línea de preparación de pedidos entera.
La FR-2.419.243-A1 describe una máquina de encargos con una estructura de soporte que porta una pluralidad de unidades de almacenamiento verticales dispuestas en una fila con productos apilados allí dentro. Los medios eyectores se montan en un carro hecho para moverse junto a la fila de unidades de almacenamiento, en la parte inferior de las mismas. Los artículos expulsados caen en un conjunto de transporte en la parte opuesta de la fila de unidades de almacenamiento.
Los comandos para controlar el carro se envían a través de un manojo de cables conectados al carro, por medio de una banda flexible insertada dentro de un surco que se extiende junto a la fila de unidades de almacenamiento.
Los carros son pesados, con motores que se extienden hacia fuera de manera que el carro en conjunto requiere mucho espacio. Llevar los comandos de control por el cable situado dentro de un surco impide definitivamente colocar otro carro en el mismo sentido. La FR-2.419.243-A1 no menciona el suministro de más de un carro.
La solicitud publicada US-2003/034356-A1 describe una máquina de encargos dotada con compartimentos de almacenamiento de productos dispuestos verticalmente y horizontalmente en una repisa. Los productos apilados en los compartimentos se expulsan mediante una unidad de expulsión posicionable en una dirección transversal a las repisas. La unidad de expulsión está hecha para moverse debajo de las filas de los compartimentos.
No obstante, este documento no sugiere el uso de una pluralidad de carros para cada lado de la máquina. La US2003/034356-A1 describió un carro doble, es decir un carro que opera en ambos lados, lo que significa que el eyector que trabaja en el lado derecho está conectado firmemente a uno que trabaja en el lado izquierdo.
Compendio de la invención El objeto de la presente invención es proponer una máquina para procesamiento automático de pedidos, en la cual se usen eyectores en movimiento para extraer los productos de las unidades de almacenamiento del canal, con un ahorro considerable en la construcción de los medios de expulsión y proponiendo una máquina de un coste más ventajoso, pero que mantiene las tasas de producción altas, sin las desventajas con respecto a otras máquinas conocidas.
Otro objeto de la presente invención es proponer una máquina, en la cual el fallo de uno de los eyectores en movimiento no causa que la máquina se detenga o de todas maneras cause solamente una ralentización muy limitada de la preparación de pedidos Estos y otros objetos se obtienen, según la presente invención, por una máquina de encargos para el procesamiento automático de pedidos de producto según la reivindicación... [Seguir leyendo]
Reivindicaciones:
1. Una máquina de encargos para procesamiento automático de pedidos de productos, con dicha máquina que incluye:
una estructura soporte (1) ;
una pluralidad de unidades de almacenamiento (2) , que se extienden considerablemente en vertical y dispuestas una junto a otra en al menos una fila, con dichos productos (30) apilados dentro de dichas unidades de almacenamiento (2) ;
al menos una guía (5, 15) , que se extiende paralela a la máquina y fijada a la estructura soporte (1) ;
medios eyectores (4) para expulsar dichos productos selectivamente, montados en un carro que se mueve a lo largo de dicha al menos una guía (5, 15) , de manera que los medios eyectores se mueven a lo largo de la estructura (1) y en la parte inferior de las unidades de almacenamiento (2) , para transportar al menos un medio eyector, el carro que está equipado con medios para la operación y control de los carros y medios de motor (12, 14) montados en el carro para mover el carro autónomamente a lo largo de la estructura (1) , a lo largo de la longitud entera de la máquina;
medios de recogida (8) para los productos (30) recogidos de las unidades de almacenamiento;
caracterizada porque la al menos una guía (5, 15) está fijada por debajo de las unidades de almacenamiento (2) y porque una pluralidad de carros (7) se proporciona a lo largo de dicha al menos una guía (5, 15) en ambos lados de la estructura (1) , todos de dichos carros que están coordinados uno con otro.
2. Una máquina, según la reivindicación 1, que además incluye medios de acoplamiento y de mallado (10, 11) , los cuales conectan dinámicamente los medios de motor (12, 14) del carro (7) a dicha estructura de máquina (1) , a fin de mover el carro.
3. Una máquina, según la reivindicación 2, en donde dichos medios de acoplamiento y de mallado (10, 11) incluyen un piñón (11) , conectado a dichos medios de motor (12, 14) , y un bastidor (10) , el cual se extiende a lo largo de la longitud entera de la máquina.
4. Una máquina, según la reivindicación 1, en donde dichos medios de motor incluyen un motor sin escobillas (12) .
5. Una máquina, según la reivindicación 1, en donde los medios de motor incluyen un motor sin escobillas (12) , conectado a un piñón (11) mediante un reductor de velocidad (14) .
6. Una máquina, según la reivindicación 1, en donde los contactos de deslizamiento para suministra potencia a dichos medios de motor, así como a los medios eyectores (4) , están situados en el carro (7) y se fijan a los contactos de línea de deslizamiento de contacto 22 que se extiende longitudinalmente a lo largo de la longitud entera de la máquina.
7. Una máquina, según la reivindicación 6, en donde dichos contactos lineales (22) están fijados a una placa de soporte (16) , usada para soportar y guiar los carros (7) .
8. Una máquina, según la reivindicación 1, en donde dicha guía o dichas guías (5, 15) están soportadas por al menos una placa de soporte (6, 16) .
9. Una máquina, según la reivindicación 1, en donde dichos medios para la operación y control de los carros (7) incluyen una unidad central de control (50) , conectada por radio con un receptor situado en una unidad de control (20) , situada a bordo de cada carro (7) y que actúa en dichos medios de motor.
10. Una máquina, según la reivindicación 1, en donde cada uno de los carros también incluye una cámara de vídeo para explorar la parte inferior de las unidades de almacenamiento del canal para detectar el número y dimensiones de cada una de las unidades de almacenamiento del canal, a fin de adaptar la operación de los carros según tal número y dimensiones.
11. Una máquina, según la reivindicación 1, en donde cada uno de los carros también incluye una cámara de vídeo para explorar un código de barras en cada producto que se expulsa.
12. Un método para el procesamiento automático de pedidos por la máquina de encargos de la reivindicación 1, en el cual los productos se sitúan dentro de al menos una fila de unidades de almacenamiento verticales con un mecanismo eyector, y entonces los productos recogidos se colocan en medios de recogida,
dicho método que se caracteriza por: adquirir datos que corresponden a un pedido;
proporcionar una serie de carros en un lado de dicha fila de unidades de almacenamiento, con dicha serie de carros que tienen cada uno un mecanismo eyector y se mueven mediante medios de motor respectivos;
colocar en secuencia los carros en posiciones correspondientes a las unidades de almacenamiento que contienen los productos que forman el pedido y operar posteriormente los mecanismos eyectores respectivos, cuando los carros están en posiciones que corresponden a las unidades de almacenamiento que contienen los productos que forman el pedido;
en donde los carros se mueven autónomamente, a lo largo de la longitud entera de la fila de unidades de almacenamiento, y el movimiento de los carros se opera en correlación recíproca y según las distancias, momentos y secuencias definidas cada vez en relación a la posición de los carros, a los productos a recoger y a las condiciones de operación de la máquina.
13. Un método según la reivindicación 12, que incluye el uso de la unidad central de control (50) , conectada por radio con un receptor situado en una unidad de control (20) , para definir dichos movimientos de los carros (7) , con dicha unidad de control (20) que está situada a bordo de cada carro (7) y que actúa en dichos medios de motor.
14. Un método según la reivindicación 12, en donde la máquina se considera como una entidad unitaria, en la medida que se concierne a la operación y el movimiento de cada carro único (7) .
15. Un método según la reivindicación 12, que incluye carros adicionales (7) , cooperando uno con el otro y con otros carros (7) , en correlación recíproca y según las distancias, momentos y secuencias definidas cada vez en relación a la posición de los carros, a los productos a capturar y a las condiciones de operación de la máquina, a fin de adaptar el rendimiento de la máquina a los cambios de las necesidades de producción, que ocurren con el tiempo, así como a la longitud de la máquina, determinada por la longitud de la fila o filas de unidades de almacenamiento.
16. Un método, según la reivindicación 12, llevado a cabo en dos filas de unidades de almacenamiento, situadas una junto a la otra, a fin de definir un túnel.
17. Un método, según la reivindicación 16, en el cual dichos medios de recogida incluyen una cinta de transporte, la cual está situada por debajo de dicho túnel y en el cual las partes fijas están definidas virtualmente para recibir productos de los pedidos respectivos.
Patentes similares o relacionadas:
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Sistema de gestión de inventario que usa vehículo guiado automatizado, del 25 de Marzo de 2020, de Hanmi IT Co., Ltd: Un sistema de gestión de inventario que usa un vehículo guiado automatizado, comprendiendo el sistema de gestión de inventario: una pluralidad […]
Sistema de almacenamiento y de preparación de pedidos, del 11 de Marzo de 2020, de SSI Schäfer Automation GmbH (DE): Procedimiento para hacer funcionar un sistema de almacenamiento y de preparación de pedidos , en el que una pluralidad de manipuladores procesa una pluralidad de […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]
Estación de preparación para la expedición para preparar artículos en contenedores de pedido y bolsas de transporte para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Estación de preparación para la expedición para preparar para la expedición artículos de contenedores de almacenamiento en contenedores de pedido según […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Dispositivo de aparcamiento robotizado y método para manejarlo, del 23 de Octubre de 2019, de Ocado Innovation Limited: Un sistema de aparcamiento robotizado que comprende al menos un dispositivo 50 de manipulación de carga y una pluralidad de contenedores 10 que alojan […]