Un sistema y método para medir y mapear una superficie con relación a una referencia.
Un sistema dispuesto para medir el desplazamiento de una primera superficie (47) de una estructura con respecto auna referencia de base que comprende una segunda superficie (45) de la estructura,
el sistema que comprende:
, un medio de escaneo (11) dispuesto para generar datos de punto de enturbiamiento con relación a una medición de laorientación espacial de una superficie distal con relación a un punto de referencia para definir una imagen tridimensionalde dicha primera superficie; un medio de almacenamiento (17) que almacena los datos de referencia de base conrelación a la orientación espacial de la segunda superficie con respecto a dicha primera superficie; y un medio deprocesamiento (19) dispuestos para procesar dichos datos de punto de enturbiamiento y dichos datos de referencia debase para determinar el desplazamiento relativo de dicha primera superficie con respecto a dicha segunda superficie; endonde dicho medio de procesamiento incluye:
(i) un medio de referencia dispuestos para orientar dichos datos de punto de enturbiamiento con relación a losdatos de referencia claves de la referencia de base y para transformar dichos datos de punto de enturbiamientoen un sistema de coordenadas que coincida con dichos datos de referencia de base; y
(ii) un medio de procesamiento de desplazamiento dispuesto para calcular el desplazamiento entre dicha primerasuperficie y dicha segunda superficie usando ambos conjuntos de datos en dicho sistema de coordenadas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2005/001630.
Solicitante: SCANALYSE PTY LTD.
Nacionalidad solicitante: Australia.
Dirección: SUITE 1, ENTERPRISE UNIT 5 7A DE LAETER WAY BENTLEY, WA 6102 AUSTRALIA.
Inventor/es: STEWART,MICHAEL PAUL, LICHTI,DEREK, FRANKE,JOCHEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B02C17/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B02 TRITURACION, REDUCCION A POLVO O DESINTEGRACION; TRATAMIENTO PREPARATORIO DE LOS GRANOS PARA LA MOLIENDA. › B02C TRITURACION, REDUCCION A POLVO O DISGREGACION EN GENERAL; MOLIENDA DE GRANOS (obtención de polvo metálico por trituración, trabajo con muela o molido B22F 9/04). › Disgregación por medio de toneles, es decir, por medio de aparatos constituidos por una cubeta en la que se cargan los productos que van a ser desintegrados, con o sin elementos particulares de disgregación como bolas o esferas (tambores de gran velocidad B02C 19/11).
- G01B11/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la rugosidad o la irregularidad de superficies.
- G01B21/30 G01B […] › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › para la medida de la rugosidad o la irregularidad de superficies.
PDF original: ES-2431047_T3.pdf
Fragmento de la descripción:
Un sistema y método para medir y mapear una superficie con relación a una referencia Campo de la invención La presente invención se refiere a sistemas y métodos de escaneo para examinar las superficies de los cuerpos sometidos a un desgaste o cambio con el tiempo. La invención tiene una utilidad particular, aunque no exclusiva, para la medición de superficies y compararlas con los datos históricos para determinar si la superficie necesita reparación o sustitución.
A lo largo de esta descripción, a menos que se especifique lo contrario, la palabra "comprenden" o las variaciones tales como "comprende" o "que comprende", se entenderán para implicar la inclusión de un entero indicado o grupo de enteros pero no la exclusión de ningún otro entero o grupo de enteros.
Técnica anterior
La siguiente discusión de la técnica anterior se destina solamente a facilitar la comprensión de la presente invención. La discusión no es un reconocimiento o admisión de que cualquier material mencionado es, o fue parte del conocimiento general común como en la fecha de prioridad de la solicitud.
La EP0875751 (A1) describe un método de tomografía tridimensional computarizado para la inspección y la comparación de la geometría real a la geometría predeterminada de un objeto. El método incluye los siguientes pasos: escanear tridimensionalmente el objeto usando una tomografía computarizada para producir múltiples sectores de datos geométricos reales del objeto; B) procesar los múltiples sectores de datos geométricos reales dentro de los datos de límites reales que definen los límites internos y externos del objeto; y C) producir datos de punto de enturbiamiento reales a partir de los datos de límites reales. El método incluye además comparar los datos de punto de enturbiamiento reales con los datos predeterminados de la geometría del objeto. La comparación puede incluir producir una imagen que compara los datos de punto de enturbiamiento con los datos predeterminados y la imagen puede representar la geometría de no conformidad entre los datos de punto de enturbiamiento y los datos predeterminados.
La WO03094102 describe un método y aparato para registrar un objeto de geometría predeterminada conocida a datos tridimensionales escaneados de manera que puede verificarse la ubicación de los objetos.
La US2002158368 (A1 ) describe métodos y sistemas para inspeccionar y reparar recipientes que incluyen un láser usado para proyectar un rayo láser dentro de un horno o recipiente caliente, un lector láser para medir una punto de enturbiamiento formada cuando la luz láser se refleja desde la pared del horno, instrumentos para seleccionar aquellos puntos en el enturbiamiento que son más relevantes, y el uso de los puntos para producir una imagen en 3D que corresponda con la geometría del interior del horno o recipiente.
El procedimiento de Sebring R. y otros: "Metrología de revestimiento tridimensional sin contacto óptico" de la 28va Conferencia Internacional sobre Ciencia de Plasma de la IEEE / la 13ra conferencia internacional de Potencia de Pulso de la IEEE, páginas 1414-7, de junio de 2001 describe una geometría de revestimiento tomada "como construida" de experimentos de revestimiento de plazo cercano usando láseres con exploración de ultraprecisión.
La EP0509809 (A2) describe un método usado para monitorear el desgaste experimentado por una superficie cilíndrica redonda de un rodillo triturador o trituradora. En el método, la circunferencia del rodillo se escanea, típicamente mediante un rayo láser, en varias posiciones a lo largo de la longitud del rodillo para obtener los valores reales de la distancia de la superficie del rodillo a partir de una referencia. Estos valores reales se comparan con los correspondientes, valores de distancia predeterminados para determinar cualquier variación entre los valores de distancia real y los valores de distancia predeterminada.
En muchas aplicaciones, es necesario evaluar el desgaste o cambio de una superficie con relación a una base o referencia. Esta información puede utilizarse para diversas aplicaciones, incluyendo la evaluación de si una superficie es segura para su uso, o cuando una superficie necesita reparación o mantenimiento como resultado del desgaste con el tiempo.
En algunas aplicaciones, un revestimiento se emplea frecuentemente como un medio rentable para proteger una superficie de la base del desgaste o daño. Consecuentemente, el revestimiento ocupa un uso con preferencia para la superficie de la base, y se sustituye ocasionalmente en lugar de reemplazar la superficie de la base, la cual puede ser más difícil o más costosa de reemplazar.
La evaluación del grado de desgaste de una superficie, ya sea con o sin un revestimiento, es difícil o consume tiempo en ciertos entornos, tales como donde la superficie se dispone internamente dentro de una cavidad o compartimiento de
un cuerpo, y especialmente cuando dicho cuerpo es rotativo. Las herramientas de medición convencionales son frecuentemente insuficientes para llevar a cabo la tarea, ya sea con respecto a la precisión de la medición, la seguridad de la ejecución de la tarea, o con respecto a factores económicos asociados con el tiempo de inactividad de uso comercial del cuerpo aun mientras se lleve a cabo la tarea de medición.
En algunos de estos ambientes, donde se involucra la trituración de material y se usan revestimientos, es importante que el desgaste del revestimiento se determine con precisión para asegurar en primer lugar que el revestimiento se sustituya antes de que se use hasta un punto donde ya no proteja más el cuerpo subyacente, y en segundo lugar para mantener la eficiencia del proceso de trituración.
Un ejemplo práctico de las consideraciones anteriores se encuentra en la trituración de minerales en la industria minera. En el procesamiento de minerales, los minerales se extraen de su estado de enclavamiento en la roca sólida mediante la trituración del mineral en bruto en trozos cada vez más pequeños y finalmente mediante su molienda en un polvo. Este proceso de trituración es multietapa, se lleva a cabo en una serie de molinos de trituración y después de molienda.
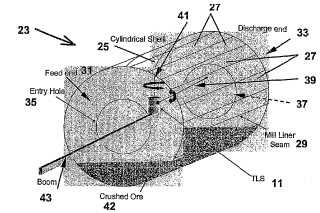
Al término del proceso de trituración, el mineral triturado se separa en trozos de unos pocos cm de diámetro (tamaño real que depende del tipo de mineral) y puede suministrarse después dentro de molinos cilíndricos rotativos. La rotación de un molino alrededor de su eje provoca que las piezas de mineral caigan por gravedad, moliendo así el mineral en fracciones cada vez más pequeñas. Algunos tipos de molinos de molienda se adaptan con cuerpos de molienda tales como bolas de hierro o acero (molinos de bolas) , barras de acero (molinos de barras) o guijarros de pedernal (molinos de guijarros) que ayudan en el proceso de molienda. Dos tipos específicos de molino son el molino autógeno (molino AG) , que opera sin ningún cuerpo de molienda, y el molino semiautógeno (molino SAG) , en el cual se añaden un pequeño porcentaje (por lo general alrededor de 10%) de los cuerpos de molienda (frecuentemente bolas de acero) .
Un circuito típico de molinos de molienda puede comprender un sistema de molienda primario, que consiste en un molino SAG o AG y dentro del cual se suministra el mineral en bruto triturado, y un sistema de molienda secundario, que consiste de molinos de bolas, de barras o de guijarros y dentro de los cuales se suministra la salida del sistema de molienda primario.
Todos los tipos de molinos cilíndricos consisten de una carcasa cilíndrica con una disposición de alimentación en un extremo y una disposición de descarga en el otro. Los diseños de alimentación y descarga varían. Por ejemplo, los canales de alimentación y alimentadores de canaleta son comunes, mientras que los alimentadores de tipo roscado, de tambor de vibración y de tipo cuchara también se usan. Las disposiciones de descarga se clasifican usualmente como de desbordamiento, periférica, de rejilla y de tipo abierta.
El interior de un molino cilíndrico se recubre de un revestimiento diseñado para las condiciones específicas de operación del molino. Los revestimientos pueden fabricarse de acero, hierro, caucho, materiales compuestos de caucho-acero o de cerámica. Los revestimientos en esta aplicación sirven para dos funciones:
1. para proteger la carcasa del molino de los daños debidos a la erosión de la abrasión;
2. para ayudar al rendimiento de la molienda.
Naturalmente, los revestimientos de los molinos se desgastan por la erosión. Normalmente, las soluciones químicas que son muy tóxicas y corrosivas para los humanos y la instrumentación por igual se introducen dentro del molino para ayudar... [Seguir leyendo]
Reivindicaciones:
1. Un sistema dispuesto para medir el desplazamiento de una primera superficie (47) de una estructura con respecto a una referencia de base que comprende una segunda superficie (45) de la estructura, el sistema que comprende: , un medio de escaneo (11) dispuesto para generar datos de punto de enturbiamiento con relación a una medición de la orientación espacial de una superficie distal con relación a un punto de referencia para definir una imagen tridimensional de dicha primera superficie; un medio de almacenamiento (17) que almacena los datos de referencia de base con relación a la orientación espacial de la segunda superficie con respecto a dicha primera superficie; y un medio de procesamiento (19) dispuestos para procesar dichos datos de punto de enturbiamiento y dichos datos de referencia de base para determinar el desplazamiento relativo de dicha primera superficie con respecto a dicha segunda superficie; en donde dicho medio de procesamiento incluye:
(i) un medio de referencia dispuestos para orientar dichos datos de punto de enturbiamiento con relación a los datos de referencia claves de la referencia de base y para transformar dichos datos de punto de enturbiamiento en un sistema de coordenadas que coincida con dichos datos de referencia de base; y
(ii) un medio de procesamiento de desplazamiento dispuesto para calcular el desplazamiento entre dicha primera superficie y dicha segunda superficie usando ambos conjuntos de datos en dicho sistema de coordenadas.
2. Un sistema como se reivindica en la reivindicación 1, en donde dichos datos de referencia claves son los parámetros críticos que describen la geometría de la referencia de base y los límites relativos de la primera superficie.
3. Un sistema como se reivindica en la reivindicación 1 o 2, en donde dicho medio de referencia incluye un proceso para localizar al menos uno de los parámetros críticos de dichos datos de referencia claves dentro de dichos datos de punto de enturbiamiento, y un proceso de transformación para transformar los datos de punto de enturbiamiento en el sistema de coordenadas que coincide con dicha base de datos de referencia de base de manera que la ubicación del parámetro crítico coincida matemáticamente con la ubicación de este mismo parámetro crítico en los datos de referencia de base.
4. Un sistema como se reivindica en la reivindicación 3, en donde dicho proceso de estimación es un proceso para estimar la localización de al menos uno de los parámetros críticos de dichos datos de referencia claves de dichos datos de punto de enturbiamiento.
5. Un sistema como se reivindica en cualquiera de una de las reivindicaciones anteriores, caracterizado porque dicha segunda superficie es la superficie interior de un carcasa sustancialmente cilíndrica (25) con extremos opuestos y dichos parámetros críticos incluyen:
• la ubicación del eje longitudinal central de la carcasa;
• el radio de la carcasa; y
• la longitud de la porción cilíndrica del molino.
6. Un sistema como se reivindica en la reivindicación 5, en donde dicho al menos uno de los parámetros críticos de dichos datos de referencia claves es el eje de la carcasa cilíndrica (25) .
7. Un sistema como se reivindica en la reivindicación 5 o 6, en donde la primera superficie comprende segmentos y dichos parámetros críticos incluyen la distancia de los puntos de esquinas de cada dicho segmento a un extremo de dicha carcasa (25) .
8. Un sistema como se reivindica en la reivindicación 7, en donde dichos parámetros críticos incluyen la distancia entre una superficie de referencia requerida y uno de los extremos opuestos de la carcasa (25) .
9. Un sistema como se reivindica en cualquiera de una de las reivindicaciones de la 5 a la 8, en donde los extremos opuestos son sustancialmente cónicos, y dichos parámetros críticos incluyen:
• los ángulos del cono de dichos extremos opuestos, con relación al eje de la carcasa cilíndrica; y
• la distancia entre los vértices de los extremos opuestos.
10. Un sistema como se reivindica en cualquiera de una de las reivindicaciones de la 6 a la 9, en donde dicho medio de procesamiento de datos incluye un medio de edición de datos para filtrar los datos de puntos no deseados a partir de los datos de punto de enturbiamiento acumulados antes de la operación de dicho medio de referencia y dicho medio de
procesamiento de desplazamiento.
11. Un sistema como se reivindica en cualquiera de una de las reivindicaciones anteriores, en donde dicho medio de procesamiento incluye además un medio de partición para particionar dichos datos de punto de enturbiamiento en segmentos discretos que corresponden a las diferentes secciones geométricas de dicha primera superficie antes de la operación de dicho medio de referencia y dicho medio de procesamiento de desplazamiento.
12. Un sistema como se reivindica en cualquiera de las reivindicaciones anteriores, como dependiente de la reivindicación 5, en donde el medio de procesamiento de desplazamiento:
calcula el radio que es la distancia ortogonal con respecto al eje de la carcasa cilíndrica a un punto de observación específico; y determina el grosor de la superficie distal con relación a la referencia de base en dicho punto de observación específico a lo largo de la carcasa cilíndrica como la diferencia entre el radio inicial aproximado de la referencia de base y el radio calculado.
13. Un sistema como se reivindica en la reivindicación 11, como dependiente de la reivindicación 5, en donde dicho medio de referencia incluye un proceso de posicionamiento para posicionar los segmentos de datos de punto de enturbiamiento que se particionaron discretamente y se almacenaron para los extremos opuestos de la carcasa cilíndrica, con relación a dicha referencia de base.
14. Un sistema como se reivindica en la reivindicación 13, como dependiente de la reivindicación 7, en donde dicho proceso de posicionamiento:
(i) extrae los datos pertenecientes a la distancia de los puntos de esquina a partir de dichos datos de punto de enturbiamiento para determinar la ubicación de los puntos de esquina (A) , la longitud de los segmentos (B) , la separación entre un segmento adyacente y el extremo opuesto de la carcasa (C) , y la extensión longitudinal de la carcasa (D) ; y
(ii) traduce los datos a lo largo del eje longitudinal al:
a. determinar la ubicación de todas las esquinas dentro de un plano vertical de segmentos visibles alrededor de toda la carcasa;
b. determinar la ubicación de todas las separaciones entre las esquinas opuestas en a. dentro de un plano vertical de segmentos visibles de toda la carcasa;
c. determinar el plano intermedio entre los planos de los mismos puntos extraídos en a. y b. ;
d. determinar la posición de la referencia de base en un extremo opuesto de acuerdo con la fórmula: ½ A + B + C; y
e. determinar la posición de la referencia de base en el otro extremo opuesto mediante la adición de D al resultado de la fórmula en d.
15. Un sistema como se reivindica en la reivindicación 13 y 14, en donde dichos parámetros críticos incluyen la distancia entre una superficie de referencia requerida y uno de los extremos opuestos de la carcasa, y dicho proceso de posicionamiento:
(i) extrae los datos relativos a la distancia entre la superficie de referencia requerida y el uno de los extremos opuestos de la carcasa (A ') , y la extensión longitudinal de la carcasa (D') a partir de los datos de referencia de base; y
(ii) traduce los datos a lo largo del eje longitudinal al:
a. determinar la posición de la referencia de base en el un extremo opuesto mediante la adición de A 'a la ubicación de la superficie de referencia en dichos datos de punto de enturbiamiento; y
b. determinar la posición de la referencia de base en el otro extremo opuesto mediante la adición de D al resultado de a. anteriormente.
16. Un sistema como se reivindica en cualquiera de una de las reivindicaciones de la 13 a la 15, en donde dicho medio de referencia invoca dicho proceso de estimación para estimar los parámetros críticos para dicho medio de procesamiento de desplazamiento para determinar subsecuentemente, el grosor de la superficie distal con relación a la superficie de la base en los extremos opuestos de la carcasa cilíndrica.
17. Un sistema como se reivindica en la reivindicación 16, en donde:
(a) dicho proceso de posicionamiento:
(i) extrae los datos pertenecientes a la distancia de los puntos de esquina a partir de dichos datos de punto de enturbiamiento para determinar la ubicación de los puntos de esquina (A) , la longitud de los segmentos (B) , la separación entre un segmento adyacente y el un extremo opuesto de la carcasa (C) , y la extensión longitudinal de la carcasa (D) ; y
(ii) traduce los datos a lo largo del eje longitudinal al:
a. determinar la ubicación de todas las esquinas dentro de un plano vertical de segmentos visibles alrededor de toda la carcasa;
b. determinar la ubicación de todas las separaciones entre las esquinas opuestas en a. dentro de un plano vertical de segmentos visibles de toda la carcasa;
c. determinar el plano intermedio entre los planos de los mismos puntos extraídos en a. y b. ;
d. determinar la posición de la referencia de base en un extremo opuesto de acuerdo con la fórmula: ½ A + B + C; y
e. determinar la posición de la referencia de base en el otro extremo opuesto mediante la adición de D al
resultado de la fórmula en d; y
(b) dicho proceso de estimación usa un método de planos paralelos de dos puntos de separación que adopta una metodología de ajuste de mínimos cuadrados simultánea, de manera que se usa el lugar geométrico de los puntos de esquina para estimar los parámetros del plano paralelo, de mejor ajuste con el objetivo de determinar la distancia a lo largo del eje longitudinal a la referencia de base en ambos de los extremos opuestos de la carcasa cilíndrica.
18. Un sistema como se reivindica en la reivindicación 17, en donde dicho medio de referencia incluye un proceso de orientación para aplicar un modelo funcional para orientar dichos datos de punto de enturbiamiento con relación a dichos datos de referencia claves de los extremos opuestos y para transformar los datos de punto de enturbiamiento en un sistema de coordenadas que coincida con la dicha base de datos de referencia para cada extremo opuesto, respectivamente
19. Un sistema como se reivindica en la reivindicación 18, en donde en el caso de que los extremos opuestos sean planos o cónicos, dicho medio de procesamiento de desplazamiento proporciona los datos de punto de enturbiamiento ya transformados, comenzando con el un extremo y después con el otro, para el cálculo del desplazamiento entre la superficie distal y la referencia de base usando ambos conjuntos de datos en el sistema de coordenadas de los datos de referencia de base.
20. Un sistema como se reivindica en cualquiera de una de las reivindicaciones de la 16 a la 19, en donde dicho proceso de estimación usa un método de superficie de referencia plana que adopta una metodología de ajuste de mínimos cuadrados simultánea, de manera que la superficie de referencia es plana y los puntos de datos de la misma en el momento de la adquisición que se posicionan por dicho medios de posicionamiento y se transforman por dicho proceso de transformación se usan para estimar los parámetros de un plano de mejor ajuste con el objetivo de determinar la distancia a lo largo del eje longitudinal de la referencia de base en ambos de los extremos opuestos de la carcasa cilíndrica.
21. Un sistema como se reivindica en cualquiera de una de las reivindicaciones anteriores, que incluye el módulo de procesamiento para proporcionar el análisis estadístico y el control de calidad de los datos de enturbiamiento acumulados, dicho módulo de procesamiento que comprende una o más de las siguientes métricas:
(i) la matriz de covarianza de los parámetros estimados;
(ii) los métodos de espionaje de datos para probar e identificar los residuos de los mínimos cuadrados y subsecuentemente eliminar los puntos atípicos;
(iii) la raíz cuadrática media (RMS) y residuo máximo;
(iv) el factor de varianza estimado.
22. Un sistema de medición de desplazamiento de una primera superficie (47) de una estructura con respecto a una referencia de base que comprende una segunda superficie (45) de la estructura, el sistema que comprende: generar datos de punto de enturbiamiento con relación a una medida de la orientación espacial de una superficie distal con relación a un punto de referencia para definir una imagen tridimensional de dicha primera superficie; obtener datos de referencia de base almacenados en un sistema de coordenadas requerido con respecto a la segunda superficie con respecto a dicha primera superficie; determinar la ubicación y dirección de los datos de referencia claves del procesamiento de dichos datos de punto de enturbiamiento y dichos datos de referencia base, dicho procesamiento que comprende orientar los datos de punto de enturbiamiento con relación a los datos de referencia claves definidos por dichos datos de referencia de base y transformar los datos de punto de enturbiamiento en una sistema de coordenadas que coincida con dicha datos de referencia de base; y determinar el desplazamiento relativo de dicha primera superficie definida por dichos datos de punto de enturbiamiento con respecto a dicha referencia de base que comprende dicha segunda superficie en dicho sistema de coordenadas.
23. Un sistema (65) para mapear el desplazamiento de una primera superficie (47) de una estructura con relación a un referencia base que comprende una segunda superficie (45) de la estructura, el sistema que comprende: - el sistema de cualquiera de una las reivindicaciones de la 1 a la 21; un medio de comparación (67) para comparar los datos de desplazamiento contra un umbral requerido; y un medio de visualización (69) para visualizar gráficamente el resultado de la comparación.
24. Un método para mapear el desplazamiento de una primera superficie (47) de una estructura con respecto a una referencia de base que comprende una segunda superficie (45) de la estructura, el método que comprende: - llevar a cabo el método de la reivindicación 22; comparar los datos de desplazamiento contra un umbral requerido; y visualizar el resultado de la comparación.
Figura 6
Figura 7
Patentes similares o relacionadas:
RUGOSÍMETRO SIN CONTACTO PARA LA MEDICIÓN DE RUGOSIDAD, del 31 de Julio de 2020, de ELEJOSTE GONZÁLEZ, Asier Miguel: 1. Rugosímetro sin contacto sobre una superficie, caracterizado porque dicho rugosímetro comprende: - un emisor configurado para emitir un haz de radiación electromagnética […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
RUGOSÍMETRO SIN CONTACTO Y MÉTODO PARA LA MEDICIÓN DE RUGOSIDAD, del 23 de Enero de 2020, de ELEJOSTE GONZÁLEZ, Asier Miguel: La invención consiste en un rugosímetro capaz de medir la rugosidad de una superficie sobre la cual no está en contacto, que comprende un emisor configurado […]
RUGOSÍMETRO SIN CONTACTO Y MÉTODO PARA LA MEDICIÓN DE RUGOSIDAD, del 20 de Enero de 2020, de ELEJOSTE GONZÁLEZ, Asier Miguel: Rugosímetro sin contacto y método para la medición de rugosidad. La invención consiste en un rugosímetro capaz de medir la rugosidad de una superficie sobre la cual […]
Método para mecanizado e inspección de piezas de trabajo, del 13 de Noviembre de 2019, de Agie Charmilles SA: Método para mecanizado de piezas de trabajo e inspección de una superficie de pieza de trabajo procesada en una máquina herramienta , comprendiendo el método […]
 Procedimiento y sistema para inspeccionar superficies, del 30 de Octubre de 2019, de ISRA VISION SYSTEMS AG: Procedimiento para inspeccionar superficies de un cuerpo tridimensional , en el que se desplazan al menos una cámara y al menos un dispositivo de […]
Procedimiento y sistema para inspeccionar superficies, del 30 de Octubre de 2019, de ISRA VISION SYSTEMS AG: Procedimiento para inspeccionar superficies de un cuerpo tridimensional , en el que se desplazan al menos una cámara y al menos un dispositivo de […]
Método de inspección de forma, aparato de inspección de forma, y programa, del 21 de Agosto de 2019, de NIPPON STEEL CORPORATION: Un método de inspección de forma que comprende: una etapa de generación de imagen de sección luminosa, en la que se aplica luz de láser lineal […]
Aparato de perfilado de productos automatizado y sistema de rebanado de productos utilizando el mismo, del 11 de Abril de 2019, de FORMAX, INC: Un aparato para adquirir un perfil de un producto alimentario para su uso en un procesamiento posterior del producto alimentario , que comprende: a) un área […]