Sistema y procedimiento de captación sincrónica de luz de fuente pulsada para realizar la monitorización de una operación de vuelo de una aeronave.
1. Procedimiento para la captación temprana de luz emitida por una fuente objetivo situada a una distancia de unacámara de formación de imágenes que funciona en asociación con un procesador para realizar la monitorización deuna operación de vuelo de una aeronave,
caracterizado porque comprende las etapas siguientes:
utilizar la cámara de formación de imágenes que funciona en respuesta a una señal de temporización producidapor un sistema de navegación global para captar una secuencia de fotogramas de imágenes de una escena, enla que la fuente objetivo está contenida, emitiendo la fuente objetivo una luz que es modulada en respuesta a laseñal de temporización para producir una emisión de luz de fuente objetivo modulada con una razón demodulación, y permitiendo la señal de temporización la captación de la secuencia de fotogramas de imágenescon una razón que está sincronizada con la razón de modulación y es un múltiplo conocido de la misma;aplicar el múltiplo conocido al cual se establece un valor que hace que la secuencia de fotogramas de imágenesincluya un primer y segundo conjuntos de imágenes que representan, respectivamente, información de la escenade fondo que incluye la emisión de luz de la fuente objetivo modulada e información de escena de fondo que noincluye la emisión de luz de la fuente objetivo modulada; y
utilizar una electrónica de lectura para procesar el primer y segundo conjuntos de imágenes para extraer lainformación de escena de fondo a partir de imágenes temporalmente correspondientes del primer y segundoconjuntos y obtener, de este modo, información de imágenes procesadas a partir de la cual la captación de laemisión de luz de la fuente objetivo modulada puede ser llevada a cabo por un procesador para permitir lamonitorización de la operación de vuelo de una aeronave.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/003893.
Solicitante: Max-Viz, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 15940 SW 72nd Avenue Portland, OR 97224 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FOSSEY, MICHAEL, E., KERR,J. RICHARD, ZURO,GREGORY A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N7/18 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
PDF original: ES-2435541_T3.pdf
Fragmento de la descripción:
Sistema y procedimiento de captación sincrónica de luz de fuente pulsada para realizar la monitorización de una operación de vuelo de una aeronave.
Campo técnico
La presente exposición se refiere a la monitorización de operaciones de vuelo de aeronaves y, en particular, a la captación temprana de luz emitida por una fuente de destino situada a una distancia de una cámara de formación de imágenes para la realización de la monitorización de operaciones de vuelo de aeronaves.
Antecedentes de la técnica En Estados Unidos, así como en otras partes del mundo, los diodos emisores de luz (LED) se utilizan como sustitutos de las luces de aeropuerto convencionales, que comprenden luces de aproximación, de pista y de calle de rodaje. Las razones de ello es que los LED de color y los LED de color azul intenso con fósforo blanco ("LED blancos") tienen una vida útil prolongada, precisan poco mantenimiento y permiten ahorrar energía. Estos LED de sustitución carecen de signatura infrarroja.
Las luces convencionales tienden a mostrar un máximo rendimiento en las longitudes de onda infrarroja de onda corta (SWIR) , comprendidas entre las longitudes de onda de luz visible y de 2 micras o más, y son, por consiguiente, mejores emisores de luz SWIR que de luz visible. El rendimiento de las luces convencionales en las longitudes de onda infrarroja de onda larga (LWIR) , (de 8 a 14 micras) , es bajo, debido a que las lentes de cristal no transmiten energía LWIR desde dentro de la bombilla y el globo externo no está particularmente caliente con respecto a la temperatura ambiental. Como consecuencia, el sistema EVS de infrarrojos pretende conseguir el rendimiento SWIR. Los modelos de instrumento EVS nº EVS 2000 y nº EVS 2500, fabricados por Max-Viz, Inc., el cesionario de la presente solicitud de patente, se implementan cada uno con una cámara SWIR dedicada separada, que se procesa para las luces, y la información de imagen procesada resultante a su vez se superpone o fusiona con las imágenes de "fondo térmico" LWIR. Los sistemas EVS "All Weather Window" fabricados por Kollsman, Inc. y los sistemas EVS SureSight fabricados por CMC Electronics se implementan cada uno con una cámara combinada SWIR e infrarroja de onda media (MWIR) , (de 3 a 5 micras) , configurada en un solo conjunto de plano focal (FPA) criorrefrigerado.
Debido a que las luces LED de sustitución carecen de signatura infrarroja, la detección de estas por un sistema EVS precisará el uso de una cámara visible (televisión) separada y la fusión con las imágenes obtenidas mediante termografía IR. Las patentes US nº 6.806.469, nº 6.373.055 y nº 6.232.602 se refieren a la utilización de dicha fusión de la imagen de las luces. La Administración Federal de Aviación (FAA) propone el uso de modulación por anchura de impulso (ciclo de trabajo) para controlar la intensidad media de las luces LED de sustitución (especialmente, LED de luz blanca y brillante) . Si se pudiera implementar funcionalmente una cámara visible con dichas luces, su uso redundaría en ventajas significativas. Podría ser preciso aplicar dichos conceptos a los LED de espectro visible y SWIR ubicados en el mismo lugar. Los LED SWIR serían beneficiosos para determinados sistemas EVS de infrarrojos, por las razones explicadas anteriormente. Por otra parte, cuando en lugar de trabajar en las longitudes de onda visibles se trabaja en las SWIR, se obtienen beneficios de rendimiento, tales como la disponibilidad de cámaras sumamente sensibles, determinadas ventajas de penetración en niebla limitadas con respecto a las longitudes de onda de luz visible y una menor reflexión del fondo solar.
El documento GB 2 224 613 A describe un sistema de aterrizaje automático que realiza, mediante un único sensor autónomo, una medición precisa de los seis grados de libertad (posición y orientación) durante el control de una aeronave. Basándose en las mediciones que realiza, el sistema evalúa las influencias perturbadoras del vuelo de la aeronave, tales como las turbulencias atmosféricas o las ráfagas de viento, y las tiene en cuenta para ofrecer una orientación precisa de la aeronave a lo largo de una trayectoria deseada y la toma instantánea de cualquier medida correctiva necesaria.
La patente US nº 6.806.469 describe un sistema de visión que genera una pantalla basada en la fusión de las imágenes de los dos reproductores de imágenes. Uno de los reproductores de imágenes detecta la radiación infrarroja de longitud de onda corta (SWIR) para generar una primera señal que representa las señales de luz eléctrica detectadas, y el otro detecta la radiación infrarroja de longitud de onda larga o mediana (LWIR o MWIR) para generar una segunda señal que representa el fondo detectado. Cada reproductor de imágenes comprende un detector y la electrónica para procesar la señal generada por el detector. El acondicionamiento y el procesamiento de señales por cada reproductor de imágenes genera una primera y una segunda señales acondicionadas y procesadas que se ajustan una en relación con la otra, de tal forma que la imagen de las fuentes de radiación de los dos rangos de longitudes de onda IR detectados se fusionen para la visualización sin pérdida de detalle de la imagen de sendos rangos de longitudes de onda IR.
Sumario de la exposición Uno de los problemas de interés es el uso de sistemas de visión mejorada (EVS) para la captación temprana de la
iluminación de pista/aproximación en condiciones adversas de atenuación por niebla. Esas condiciones se agravan en horas diurnas debido a la influencia del fondo de niebla iluminado por el sol. En cualquier caso, uno de los objetivos de esta aplicación es sobrepasar con creces el rendimiento del sentido de la vista del piloto de una aeronave ofreciendo instrumentos en los que las luces aparecen en una pantalla (y en otras operaciones de procesamiento informático para la captación/identificación de pista, tales como, por ejemplo, el reconocimiento de patrones de luces de pista y la renderización de una imagen de estos) mucho antes de que el piloto pueda ver las luces "desde su ventanilla".
Una situación relacionada es la captación de aeronaves provistas de balizas pulsadas por cámaras situadas en tierra sincronizadas con las balizas pulsadas. Esta aplicación se plantea en la captación e identificación de aeronaves no tripuladas (UAV) a su regreso a sus controladores.
Otro de los problemas de interés es el uso de tecnología de fuentes y sensores que ofrece la capacidad de ver o la de detectar y evitar para las aeronaves tripuladas o UAV en presencia de un fondo celeste diurno y terrestre. Uno de los objetivos de esta aplicación es permitir a una aeronave que utiliza balizas pulsadas ver en vuelo otra aeronave equipada con cámaras sincronizadas. Esto evita colisiones de aeronaves y se aplica sobre todo a las aeronaves UAV para la detección de otras aeronaves con mucha antelación a fin de superar la deficiente maniobrabilidad de las aeronaves UAV.
Las soluciones a estos problemas conllevan la utilización de equipos de vídeo de espectro visible o infrarrojo cercano controlados en una modalidad de detección sincrónica con emisiones de luz pulsada compatibles, denominadas a veces balizas pulsadas. Las formas de realización preferidas implementan la "apertura" de la cámara sincrónicamente con fuentes de iluminación por diodo moduladas, tales como los impulsos LED de aproximación/aterrizaje visibles propuestos por la FAA, o las emisiones de diodo láser infrarrojo pulsadas para evitar colisiones. Esto se consigue con una razón de fotogramas de la cámara que es dos veces la frecuencia de impulsos del LED o el diodo láser, de tal forma que los fotogramas alternen entre una escena de fondo con luces y una escena de fondo sin luces. A continuación, con ayuda de un procesador de vídeo en tiempo real, cada fotograma alternativo se sustrae de tal forma que la escena de fondo se anula. Las ventajas que se derivan de esta estrategia son la anulación de las luces irrelevantes durante la noche y de la iluminación solar de fondo durante el día.
La diferenciación de los fotogramas de vídeo, por consiguiente, causa la eliminación de la escena de fondo, así como de todas las luces que no sean de interés. Aplicando una operación de umbralización adecuada al patrón de diferencias de píxeles resultante del conjunto de detectores de la cámara, las luces deseadas se captan y representan como símbolos puntuales en una pantalla. En una forma de realización de un sistema de aterrizaje de visión mejorada, las luces deseadas (símbolos) se superponen a una imagen térmica de la escena o se "fusionan" con ésta; como alternativa, los símbolos pueden superponerse a una imagen de una escena visible... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la captación temprana de luz emitida por una fuente objetivo situada a una distancia de una cámara de formación de imágenes que funciona en asociación con un procesador para realizar la monitorización de 5 una operación de vuelo de una aeronave, caracterizado porque comprende las etapas siguientes:
utilizar la cámara de formación de imágenes que funciona en respuesta a una señal de temporización producida por un sistema de navegación global para captar una secuencia de fotogramas de imágenes de una escena, en la que la fuente objetivo está contenida, emitiendo la fuente objetivo una luz que es modulada en respuesta a la señal de temporización para producir una emisión de luz de fuente objetivo modulada con una razón de modulación, y permitiendo la señal de temporización la captación de la secuencia de fotogramas de imágenes con una razón que está sincronizada con la razón de modulación y es un múltiplo conocido de la misma;
aplicar el múltiplo conocido al cual se establece un valor que hace que la secuencia de fotogramas de imágenes incluya un primer y segundo conjuntos de imágenes que representan, respectivamente, información de la escena de fondo que incluye la emisión de luz de la fuente objetivo modulada e información de escena de fondo que no incluye la emisión de luz de la fuente objetivo modulada; y
utilizar una electrónica de lectura para procesar el primer y segundo conjuntos de imágenes para extraer la información de escena de fondo a partir de imágenes temporalmente correspondientes del primer y segundo conjuntos y obtener, de este modo, información de imágenes procesadas a partir de la cual la captación de la emisión de luz de la fuente objetivo modulada puede ser llevada a cabo por un procesador para permitir la monitorización de la operación de vuelo de una aeronave.
2. Procedimiento según la reivindicación 1, en el que la emisión de luz de la fuente objetivo modulada:
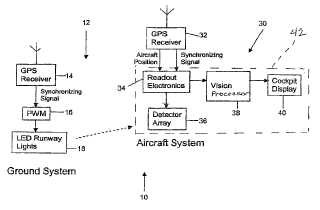
a. se propaga desde un sistema de tierra, y en el que está incluida la cámara de formación de imágenes y el primer y segundo conjuntos de imágenes son procesados en un sistema embarcado en una aeronave, permitiendo, de este modo, la monitorización de la operación de vuelo de una aeronave por la aeronave, o
b. se propaga desde un sistema embarcado en una aeronave, y en el que está incluida la cámara de formación de imágenes y el primer y segundo conjuntos de imágenes son procesadas en un sistema de tierra, permitiendo de este modo que el sistema de tierra monitorice la operación de vuelo de la aeronave,
c. se propaga desde un primer sistema embarcado en una aeronave, y en el que está incluida la cámara de formación de imágenes y el primer y segundo conjuntos de imágenes son procesados en un segundo sistema embarcado en una aeronave, permitiendo de este modo la monitorización de la operación de vuelo de la primera aeronave por la segunda aeronave, o
d. se propaga desde un LED que emite longitudes de onda de luz visible y la cámara de formación de imágenes es sensible a la luz visible, o
e. se propaga desde una fuente de luz objetivo que emite luz SWIR infrarroja de onda corta, y la cámara de
formación de imágenes es sensible a la luz SWIR, o 45
f. incluye una baliza de luz pulsada de tipo portátil.
3. Procedimiento según la reivindicación 2, en el que cuando la emisión de luz de la fuente objetivo modulada se propaga desde un primer sistema embarcado en una aeronave, uno de entre el primer y segundo sistemas embarcados en una aeronave:
a. se halla en una aeronave tripulada y el otro de entre el primer y segundo sistemas embarcados en una aeronave, se halla en una aeronave no tripulada, o 55 b. se halla en aeronaves tripuladas diferentes.
4. Procedimiento según la reivindicación 2, en el que cuando la emisión de luz de la fuente objetivo modulada se propaga desde un sistema de tierra, el sistema de tierra incluye una iluminación de zona de aterrizaje como la emisión de luz de fuente objetivo modulada.
5. Procedimiento según la reivindicación 4, en el que la visión del piloto de la iluminación de la zona de aterrizaje está entorpecida debido a unas condiciones atmosféricas que atenúan la luz visible.
6. Procedimiento según la reivindicación 4, en el que la iluminación de la zona de aterrizaje incluye: 65
a. un campo de luces de aeropuerto, o
b. una baliza de luz pulsada, o
c. una baliza de luz pulsada de tipo portátil.
7. Procedimiento según la reivindicación 1, que comprende además la submodulación de la emisión de luz de fuente objetivo modulada con una razón de submodulación, que facilita información de identificación acerca de la emisión de luz de fuente objetivo modulada.
8. Procedimiento según la reivindicación 7, en el que la emisión de luz de fuente objetivo modulada es la iluminación de una zona de aterrizaje, y la información de identificación identifica un aeropuerto. 10
9. Procedimiento según la reivindicación 1, en el que los fotogramas de imágenes son captados con una razón que es el doble de la razón de modulación.
10. Procedimiento según la reivindicación 1, en el que la emisión de luz de fuente destino es modulada mediante 15 modulación por anchura de impulso.
11. Procedimiento según la reivindicación 1, en el que el procesamiento de imágenes correspondientes incluye la sustracción de imágenes temporalmente correspondientes del primer y segundo conjuntos para proporcionar una escena modificada.
12. Procedimiento según la reivindicación 1, en el que la emisión de luz de fuente objetivo es modulada haciendo que la emisión de luz de fuente objetivo sea pulsada con una razón de impulsos, y que comprende además las etapas siguientes:
hacer funcionar la cámara de formación de imágenes con una razón de captación para captar la secuencia de fotogramas de imágenes de una escena, sobrepasando las razones de pulsación y captación la razón de fotogramas de una cámara de televisión convencional;
realizar el procesamiento del primer y segundo conjuntos de imágenes formando un número N de pares de 30 imágenes temporalmente correspondientes del primer y segundo conjuntos; y
integrar el número N de pares a una frecuencia de integración que sobrepasa la razón de fotogramas de una cámara de televisión convencional para establecer una relación señal-ruido que se incrementa con una frecuencia de integración creciente.
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
Método, dispositivo y medios de almacenamiento informático de control táctil de múltiples canales para máquina de integración, del 13 de Mayo de 2020, de Guangzhou Shirui Electronics Co., Ltd: Un método para un control táctil de múltiples canales de una máquina todo en uno, en donde la máquina todo en uno es un equipo integrador que combina […]
Procedimiento de visualización de imágenes o vídeos e instalación asociada, del 29 de Abril de 2020, de THALES: Procedimiento de visualización sobre un visualizador de imágenes o vídeos procedentes de cámaras , constando el visualizador de varias zonas de visualización […]
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
Aparato y procedimiento para adquirir una imagen bidimensional de la superficie de un objeto tridimensional, del 1 de Abril de 2020, de Capsugel Belgium NV: Aparato para adquirir una imagen bidimensional de la superficie externa de un objeto tridimensional seleccionado de cápsulas del tipo utilizada en aplicaciones […]
Sombreado de representaciones CG de materiales, del 18 de Marzo de 2020, de Chaos Software Ltd: Un aparato para escanear muestras de material, el aparato comprendiendo: una fuente de luz colimada que tiene una lente para emitir luz colimada; un segundo […]
Sistema y procedimiento de actualizaciones de parámetros de cámara basados en zonas virtuales en sistemas de vídeo vigilancia, del 18 de Marzo de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: un procesador de un sistema de vigilancia que detecta la selección de al menos una porción de un área asegurada a través de […]
Sistema y método para la reconfiguración de un dispositivo de control de un sistema de entretenimiento, del 4 de Marzo de 2020, de UNIVERSAL ELECTRONICS, INC.: Un dispositivo de entretenimiento , que comprende: un dispositivo de procesamiento ; y un medio no transitorio, legible por computadora […]