SISTEMA PARA LA RESECCIÓN DE LA MESETA TIBIAL Y/O DE LOS CÓNDILOS DEL FÉMUR PARA IMPLANTAR UNA PRÓTESIS.
Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur para implantar una prótesis.
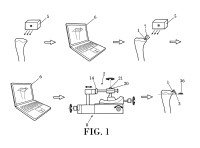
De acuerdo con la invención el sistema permite efectuar un estudio preoperatorio en el que se modeliza la tibia y/o del fémur en un ordenador (6) en 3D, se define el plano ideal de corte, y se modeliza la posición del instrumental de resección (1, 2, 3) para cortar el hueso. Asimismo según la invención el sistema permite redefinir el plano ideal de corte y el posicionamiento y orientación del instrumental de resección (1, 2, 3) sobre la tibia y/o el fémur, de modo que el plano de la ranura (4) de la guía de corte (3) por la que se introduce la herramienta de corte coincida con el plano ideal de corte.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2008/000127.
Solicitante: TRAIBER, S.L.
Nacionalidad solicitante: España.
Inventor/es: MARQUEZ ALVAREZ,LUIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/15 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Dispositivos de guiado al efecto.
- A61F2/46 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Herramientas especiales para la implantación de articulaciones artificiales (instrumentos quirúrgicos A61B 17/00).
Fragmento de la descripción:
SISTEMA PARA LA RESECCIÓN DE LA MESETA TIBIAL Y/0 DE LOS CÓNDILOS DEL FÉMUR PARA IMPLANTAR UNA PRÓTESIS
5 DESCRIPCIÓN OBJETO DE LA INVENCIÓN
1O La presente invención pertenece al campo de las prótesis de rodilla y más concretamente propone un método y un sistema para llevar a cabo la resección de la meseta tibial y/o de los cóndilos del fémur para la implantación de la prótesis.
15 20 25 El objeto de la invención consiste en un sistema mediante el que se realiza un estudio preoperatorio que modeliza la tibia y el fémur del paciente en 30 para definir el plano ideal de corte y modeliza la posición del instrumental para cortar el hueso, y a continuación, en la etapa de cirugía, traslada y redefine sobre la tibia y el fémur del paciente los datos de la posición y orientación real del instrumental para practicar la resección según dicho plano de corte. Es asimismo objeto de la invención el método empleado para modelizar la tibia y/o el fémur y determinar el plano de corte o resección en un estudio preoperatorio, así como en la fase posterior de cirugía para realizar reajustes en la orientación del instrumental de corte según el plano de corte determinado.
Otro objeto de la invención método de modelización descrito. se refiere al programa que ejecuta el
ANTECEDENTES DE LA INVENCIÓN
5 1 O Una intervención de sustitución total de una rodilla consiste en la implantación de una prótesis que hace la función de ésta. La intervención consiste en primer lugar en cortar el extremo inferior del fémur y el extremo superior de la tibia para dejar una superficie en la que se puedan implantar los elementos de la prótesis. A continuación entre estos dos elementos se coloca una separación de polietileno que permite la rotación y la compensación del corte tibial.
15 20 Un factor importante en el éxito de estas intervenciones, en relación con el tiempo de vida de la prótesis por ejemplo, es la correcta colocación de la prótesis con respecto a la anatomía del paciente. Para conseguir efectuar esta implantación correctamente se hace un estudio preoperatorio basado en un par de radiografías de la rodilla tomadas desde dos puntos de vista perpendiculares (frontal y lateral) . Habiendo anotado la posición y/o los ángulos entre ciertas características anatómicas, el cirujano puede efectuar unos cálculos para determinar la posición y orientación espacial deseable de la prótesis (en tres dimensiones o, más bien, en dos dimensiones, una para cada vista) .
25 La orientación espacial hace referencia a la orientación del plano de corte de la tibia y/o el fémur. En efecto, el cirujano tiene que reseccionar la tibia y/o el fémur en un plano con una orientación espacial definida por dos ángulos respecto a un eje imaginario que pasa por el eje mecánico de la misma.
30
Este eje imaginario está construido mentalmente por el cirujano a partir de información visual directa o de las imágenes de fluoroscopia de rayos X. Dado que se trata de una estimación cualitativa, a veces no sepuede colocar la prótesis en la alineación deseada.
Así pues, la dificultad que tiene este proceso es transportar de la manera más precisa posible la orientación del plano de corte respecto al eje mecánico del hueso, decidida a partir de las imágenes preoperatorias, a las quot;coordenadas pacientequot; durante la intervención quirúrgica.
Las soluciones empleadas durante la intervención contemplan el empleo de cirugía, el uso de navegadores o de sistemas robotizados.
El empleo de cirugía supone que durante la intervención se utilizan guías intra o extramedulares, en las cuales se acopla instrumental para cortar el hueso en la orientación 30 deseada. En relación con esta orientación, el cirujano puede, mediante el instrumental adecuado, actuar según un plano de corte. Sin embargo si la guía se encuentra un poco desviada, la orientación del corte, y por tanto la de una parte de la prótesis, no sería la deseada.
Otra solución contempla el uso de navegadores comerciales consistentes en sistemas de visión por computación basados en un par estereoscópico de cámaras de infrarrojos. Una vez calibradas las cámaras, es posible determinar por triangulación las coordenadas 30 de un punto visible por parte de dos cámaras al mismo tiempo.
Mediante la navegación el cirujano crea un mapa anatómico individual para cada paciente. Previamente a la intervención, se fijan unos marcadores al hueso (tibia y/o fémur) del paciente. Después, se fijan unos diodos (LEOs) que emiten luz infrarroja para que sean fácilmente visibles por las cámaras. De esta manera, el computador puede deducir las coordenadas (paciente) 3D de los marcadores a partir de las coordenadas 20 de los diodos captadas en cada cámara.Como los diodos emisores se encuentran fijados al paciente, no importa que la pierna se mueva ya que se recalcula su posición constantemente. De esta manera se pueden grabar movimientos y puntos de referencia y, a partir de estos datos, el sistema de navegación muestra la posición de los instrumentos en relación a la información disponible del paciente en la pantalla del ordenador. De esta forma se asiste al cirujano en la alineación de los instrumentos durante la intervención para asegurar la correcta implantación de la prótesis.
El uso de navegadores probablemente constituya la mejor solución desde el punto de vista técnico, pero por un lado tienen el problema de que su coste económico los hace difícilmente accesibles para hospitales pequeños y medianos, y por otro el proceso de calibración es largo y debe ser realizado por el mismo cirujano con la consecuente duración de las intervenciones.
Otra solución consiste en el empleo de brazos robotizados, comandados por ordenador, que pueden realizar la resección del hueso automáticamente con la ayuda de un navegador y/o de imágenes preoperatorias. Por lo tanto resultan ser sistemas aun más complejos que los de los navegadores.
DESCRIPCIÓN DE LA INVENCIÓN
De acuerdo con el método que se propone en esta invención se trata de practicar la resección de la meseta tibial y/o de los cóndilos femorales en un plano de corte establecido como ideal por el médico en un estudio preoperatorio, de modo que se minimicen las posibilidades de error y de causar daño a la tibia y/o a los cóndilos femorales al efectuar los cortes.
En el estudio preoperatorio se trata de obtener todos los datos geométricos de la tibia y/o el fémur por medios de exploración que pueden consistir en aparatos concebidos para realizar operaciones de escaneado, resonancia magnética, radiografía o tomografía computerizada, por ejemplo.Estos datos son tratados con ayuda de un ordenador, de acuerdo con un programa desarrollado a tal efecto, para reconstruir la tibia y/o el fémur generando un modelo virtual en 30. A la vista de este modelo el cirujano decide cual es el plano ideal de corte y así queda definido un primer modelo virtual.
Asimismo sobre estas imágenes, y más concretamente sobre este primer modelo virtual, se introduce una reproducción virtual del instrumental empleado para la resección del hueso, con medidas y formas coincidentes a las mostradas por los objetos físicos.
De modo general el instrumental empleado para la resección incluye un soporte que se enclava en el hueso, un portaguía que se monta sobre el soporte que en su extremo tiene el soporte de posicionamiento de la guía de corte y una guía de corte.
En este primer modelo virtual de la tibia y del fémur se fija el conjunto formado por soporte virtual, portaguía virtual y guía de corte virtual, estableciendo la posición y orientación del soporte virtual sobre el hueso, de modo tal que el plano de la ranura de la guía de corte coincida con el plano ideal de corte seleccionado por el cirujano.
Las fases descritas se realizan en el estudio preoperatorio, a continuación, en la etapa de cirugía, se coloca el soporte en la tibia o en el fémur del paciente en un punto y en una posición aproximadamente coincidentes con las obtenidas para el soporte virtual.5 Para determinar la posición exacta en la que se ha colocado el soporte sobre la tibia o en el fémur, se monta sobre éste una placa de referencia que está preferentemente formada por material translúcido a una radiografía y elementos radio opacos. A continuación se aplican medios de exploración sobre la placa de referencia, preferentemente se realizan fluoroscopias aproximadamente ortogonales, que se cargan al programa, donde se obtiene un segundo modelo virtual en el que se aprecia el perfil superior de la tibia o del fémur, el soporte y la placa de referencia.
1 O De esta manera se puede comparar...
Reivindicaciones:
1. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis que incorpora un instrumental de corte o resección
5 (1, 2, 3) compuesto por un soporte de fijación (1) destinado a su fijación sobre
la tibia y/o sobre el fémur, un portaguía (2) que se monta sobre el soporte de
fijación (1 ) , y una guía de corte (3) , que está dotada de una ranura (4) para el
paso de la herramienta de corte (36) con la que practica la resección, que a su
vez se monta sobre el portaguía (2) , caracterizado porque comprende
1 O adicionalmente:
medios de exploración (5) que captan imágenes de la tibia, y/o del
fémur
un ordenador (6) al que le llegan esas imágenes a partir de las cuales
15 modeliza la tibia y/o el fémur en 30 mediante un software que asimismo
define la posición virtual del instrumental de resección de acuerdo con
un plano de corte,
una placa de referencia (7) desmontable que se monta sobre el soporte
de fijación (1) para, a través de los medios de exploración (5) , enviar
20 imágenes de la posición y orientación del soporte de fijación (1) al
ordenador (6) para redefinir el plano de corte y la posición del
instrumental de corte (1, 2, 3) ,
un útil de calibración (8) en el que se ajusta el instrumental de corte (1,
2, 3) .
25
2. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis según reivindicación 1 caracterizado porque el
soporte de fijación (1) comprende un clavo (5) , un tramo central cilíndrico (6) y
un tramo superior (37) cuasi cilíndrico rematado por un plano vertical, en el
30 interior del cual se encuentra un taladro longitudinal (38) .
3. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis según reivindicaciones anteriores caracterizado
porque la placa de referencia (37) comprende:
- un cuerpo central (9) dotado de una perforación (1 O) de configuración
5 adaptable al tramo superior (7) del soporte de fijación (1 ) ,
- un cuerpo transparente a las radiografías (11) que circunda al cuerpo central
(9) y unas esferas radio opacas (12) integradas en el cuerpo transparente a las
radiografías (11 ) , y
- un tornillo (13) que atraviesa la perforación (1 O) y atornilla en el taladro
1 O longitudinal (38) del soporte de fijación (1) vinculando la placa de referencia (7)
con dicho soporte de fijación (1 ) .
4. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis según reivindicaciones anteriores caracterizado
15 porque el portaguía (2) comprende:
- un soporte de posicionamiento (14) de la guía de corte (3) en la que se define
una acanaladura (24) destinada a recibir dicha guía de corte (3) ,
- unos ejes paralelos ( 15) solidarios al soporte de posicionamiento ( 14) de la
guía de corte (3) unidos a su vez por sus extremos opuestos,
20 -un carro (16) montado sobre los ejes paralelos constituido por dos pletinas
(17) , superior e inferior, unidas entre sí por tornillos (18) , que se desplazan con
carácter deslizante respecto a los ejes (15) , y que disponen de
correspondientes aberturas centrales (19) ,
- una rótula (20) situada entre las aberturas centrales (19) de las pletinas (17) ,
25 respecto a la que puede girar el carro (16) en el plano horizontal y en el plano
vertical, en la que se encuentra un tornillo central (21) que vincula el portaguía
(2) al soporte de fijación (1 ) , y que cuenta en su cara inferior un encaje (25) de
configuración acoplable al tramo superior (37) del soporte de fijación (1 ) , y
- un tornillo de fijación (22) empleado para abrazar las pletinas (17) contra la
30 rótula (20) y contra uno de los ejes (15) para fijar la orientación relativa del
portaguía (2) respecto al tornillo central (21 ) .5. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis según reivindicaciones anteriores caracterizado
porque el útil de calibración (8) comprende:
- un eje de acoplamiento (28) de la misma forma y dimensiones que el tramo
5 superior (37) del soporte de fijación (1 ) , sobre el cual se acopla la rótula (20)
del portaguía (2) ,
- un apoyo (29) distante del eje de acoplamiento (28) sobre el que se encaja el
soporte de posicionamiento de la guía de corte (14) ,
- un primer bloque (30) sobre el que se monta el apoyo (29) que está actuado
1 O por un primer mando (31) para su desplazamiento lineal respecto al eje de
acoplamiento (28) al objeto de ajustar la distancia entre el soporte de
posicionamiento (14) de la guía de corte (3) y la rótula (20) ,
- un segundo bloque (32) al que se vincula el eje de acoplamiento (28) del útil
de calibración (8) que es actuado por un segundo mando (34) para su
15 desplazamiento giratorio en el plano vertical para ajustar la inclinación relativa,
en este plano vertical del soporte de posicionamiento (14) de la guía de corte
(3) respecto a la rótula (20) ,
- un tercer bloque (33) , respecto al que gira el segundo bloque (32) , que está
actuado por un tercer mando (35) para su giro en el plano horizontal para
20 ajustar la posición angular del soporte de posicionamiento (14) de la guía de
corte (3) respecto a la rótula (20) .
6. Sistema para la resección de la meseta tibial y/o de los cóndilos del fémur
para implantar una prótesis según reivindicación 1 caracterizado porque los
25 medios de exploración (5) se seleccionan entre aparatos concebidos para
realizar operaciones de escaneado, resonancia magnética, radiografía,
tomografía computerizada y cualquier otro medio de captación de imágenes.
7. Método de modelización de la tibia y/o del fémur y de configuración
30 posicional del instrumental de resección caracterizado porque comprende las
fases de:captación de imágenes de la tibia y/o del fémur y generación de un primer modelo virtual de la tibia en 30 para seleccionar el plano ideal de corte o resección de la meseta tibial, y/o de los cóndilos del fémur determinación en el modelo virtual de la tibia y/o fémur de la posición del instrumental de corte en función del plano ideal de corte, captación de imágenes de la tibia y/o del fémur junto con una placa de referencia y generación de un segundo modelo virtual con la posición y orientación del modelo real, determinación del desfase entre el primer modelo virtual y el segundo modelo virtual y presentación de datos de corrección para la configuración del instrumental para la realización del corte.
8. Método de modelización de la tibia y/o del fémur y de configuración posicional del instrumental de resección según reivindicación 7, caracterizado porque no requiere emplear guías intra o extramedulares.
9. Programa de ordenador que comprende medios de código adaptados para realizar todas las fases del método definido según las reivindicaciones 7 y 8 cuando dicho programa se ejecuta en un ordenador.
Patentes similares o relacionadas:
Sistema de extracción de instrumento quirúrgico ortopédico, del 3 de Junio de 2020, de DePuy Ireland Unlimited Company: Un sistema de extracción de instrumentos quirúrgicos que comprende: una primera herramienta de extracción que tiene un primer cuerpo que se extiende entre […]
Conjuntos de jaulas intervertebrales extensibles, del 27 de Mayo de 2020, de Robinson, James, C: Una jaula expansible para su inserción en un espacio intervertebral caracterizada porque comprende: un cuerpo de jaula que tiene una porción superior y […]
Procedimiento de fabricación de un implante, principalmente vertebral o intervertebral, e implante obtenido por este procedimiento, del 27 de Mayo de 2020, de MEDICREA INTERNATIONAL: Procedimiento de fabricación de un implante , principalmente vertebral o intervertebral, comprendiendo este implante (1, 21, […]
Método para ensamblar una prótesis ortopédica femoral, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un método para ensamblar una prótesis ortopédica, el método comprendiendo: alineando una construcción de prueba femoral con un instrumento […]
Instrumental mínimamente invasivo para la entrega de un espaciador interespinoso, del 6 de Mayo de 2020, de VERTIFLEX, INC: Un instrumento de inserción para un espaciador interespinoso, que comprende: un cuerpo cilíndrico alargado que tiene un extremo proximal […]
Aparato para alinear una copa acetabular, del 29 de Abril de 2020, de DePuy Ireland Unlimited Company: Una copa acetabular que comprende: una cubierta sustancialmente hemisférica que tiene un borde , en donde un eje de copa de la copa acetabular pasa a través […]
Implante óseo, del 1 de Abril de 2020, de Attenborough Dental Laboratories Limited: Un implante para su uso en el cuerpo, caracterizándose el implante por que la conformación de al menos una parte de la superficie del implante […]
Prótesis interina de articulación, del 1 de Abril de 2020, de WALDEMAR LINK GMBH & CO. KG: Prótesis interina de articulación insertable en un hueso tubular para reemplazar a una endoprótesis de articulación que se debe explantar, en la que la […]