SISTEMA DE CONTROL DE TRACCIÓN, DIRECCIÓN Y FRENADO DE VEHÍCULOS MEDIANTE COMUNICACIÓN POR CABLE.
Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable,
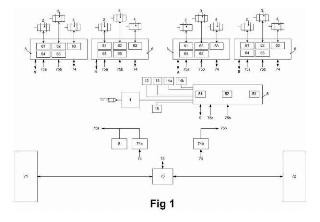
que consta de:
- cuatro controladores electrónicos (6) asociados uno a cada rueda del vehículo;
- un volante (1) con realimentación para simulación de tacto real;
- un pedal de freno, que ejerce la función de frenado con prioridad sobre los mandos en el volante (1);
- una unidad central (5) con dos procesadores (51), (52) que permiten implementar una arquitectura redundante de seguridad; y un módulo (53) de control de la realimentación del volante (1);
- una red de comunicaciones (9) determinista en tiempo y redundante por seguridad;
- un doble pack de baterías de alta tensión (71), (72) unidos a través del módulo de interconexión (73), y desconectables el uno del otro;
- una red de alimentación de alta tensión (74); y
- una red de alimentación redundante de baja tensión (75a), (75b).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131205.
Solicitante: Afypaida (Asociación para el fomento y promoción de actividades industriales y deportivas de automoción).
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ ISOIRD,Carlos Javier, FAURI LARREA,Mikel, SUEZA IRCIO,Joan, BASTERRECHEA GARITANO,Pedro Camilo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60T8/62 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › Las ruedas individuales del vehículo tienen (i) sistemas de frenado autónomos que actúan sobre las ruedas individuales según su estado dinámico o (ii) una unidad central de proceso que recibe señales de entrada de las ruedas individuales o de los grupos de ruedas que producen unas señales de control para accionar separadamente las ruedas o los grupos de ruedas.
Fragmento de la descripción:
Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable
Objeto de la invención El objeto del invento es un sistema de control de tracción, dirección y frenado de vehículos que utiliza la comunicación por cable, con lo cual reduce en la medida de lo posible los enlaces mecánicos directos entre los mandos del conductor y los elementos de tracción dirección y frenado del vehículo.
Antecedentes de la invención El solicitante no conoce precedentes de vehículos, catalogados dentro de la categoría de los cuadriciclos pesados, que puedan constituir antecedentes del objeto de este invento.
Descripción de la invención El sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, se caracteriza porque consta de:
- Cuatro controladores electrónicos, asociados uno a cada una de las ruedas del vehículo, y que accionan cada uno al correspondiente motor de tracción, actuador de dirección y actuador electrohidráulico para el circuito de frenado local;
- un volante, con realimentación para simulación de tacto real;
- una unidad central con dos procesadores que permiten implementar una arquitectura redundante de seguridad; y un módulo de control de realimentación del volante que ejecuta físicamente los comandos de par determinados por la función del sistema de realimentación;
- una red de comunicaciones determinista en tiempo y redundante por seguridad;
- un doble pack de baterías de alta tensión unidos a través de un módulo de interconexión, y desconectables el uno del otro; y
- una red de alimentación de alta tensión que proporciona potencia a los controladores electrónicos asociados a las ruedas, al par motor de tracción, al actuador de dirección, al actuador electrohidráulico y a unos convertidores de tensión que transforman la energía de alta tensión, suministrada por el pack de baterías de alta tensión, en energía de baja tensión, para alimentar una red de alimentación redundante de baja tensión.
También se caracteriza porque cada controlador electrónico citado consta de, al menos, un procesador principal que gestiona las comunicaciones con la unidad central y transfiere en tiempo real las órdenes a los controladores de actuador de dirección, de motor de tracción y de actuador de frenado; y un procesador redundante que realiza las mismas funciones que el procesador principal a partir de un bus de 12v auxiliar; de modo que permite seguir teniendo el control de las ruedas incluso con un fallo en la alimentación principal y en el procesador principal;
El controlador de motor de tracción lleva a cabo las órdenes de par recibidas de la unidad central y comunicadas por el procesador principal, y comprueba que se ejecutan según lo esperado.
El controlador de actuador de dirección lleva a cabo las órdenes de ángulo de rueda recibidas de la unidad central y comunicadas por el procesador principal, y comprueba que se ejecutan según lo esperado.
El controlador de actuador de frenado lleva a cabo las órdenes de frenado mecánico recibidas de la unidad central y comunicadas por el procesador principal, y comprueba que se ejecutan según lo esperado.
También se caracteriza porque el volante con realimentación para simulación de tacto real incluye un sistema de retroalimentación de par.
También se caracteriza porque la citada arquitectura redundante de seguridad implementada en los procesadores de la unidad central:
- realiza simultáneamente en el primer procesador los cálculos de par solicitado a cada uno de los cuatro motores de tracción y, de forma paralela, los cálculos de par en el segundo procesador; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza simultáneamente en el primer procesador los cálculos de ángulo objetivo de dirección solicitado a cada una de las cuatro ruedas y, de forma paralela, los cálculos del ángulo en el segundo procesador; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza simultáneamente en el primer procesador los cálculos de presión de frenado mecánico solicitado a cada uno de los cuatro actuadores electrohidráulicos, combinado con frenado regenerativo a través de cada uno de los motores de tracción, que será diferente en función de la situación dinámica del vehículo y, de forma paralela, los cálculos de presión de frenado mecánico en el segundo procesador; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza en el primer procesador el cálculo de la realimentación en cada instante para el volante en función de las condiciones del vehículo;
- implementa, en el primer procesador los controles dinámicos del vehículo y, además de dichos controles (ABS, ESP, VSC, y similares) , realiza automáticamente las funciones de “diferencial virtual” puesto que no existe ninguna unión física entre las ruedas. Simultáneamente, realiza estos mismos cálculos en el segundo procesador; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel.
También se caracteriza porque la citada red de comunicaciones va implementada sobre red determinista redundante en tiempo real con entrega garantizada; de modo que permite una comunicación en tiempo real entre los diferentes elementos.
También se caracteriza porque el citado doble pack de baterías de alta tensión se conectan en paralelo; de modo que, en caso de caída de uno de ellos, el módulo de interconexión lo desconectaría y se seguiría funcionando en modo seguro de emergencia a partir del otro.
También se caracteriza porque cada una de las unidades de control se alimenta de una red separada gracias a dos convertidores de tensión continua que suministran la tensión necesaria a cada una de ellas desde la red de alimentación de alta tensión. Una de de las unidades de control se complementa con una batería auxiliar para el caso en el que pudieran fallar los dos convertidores de tensión (ó los dos paquetes de baterías de alta tensión, ó el módulo de interconexión de batería, ó varios de ellos de forma simultánea) se permita continuar funcionando hasta realizar una parada de emergencia controlada.
Adicionalmente, un pedal de freno puede funcionar de forma simultánea ejerciendo la función de frenado con prioridad sobre los mandos del volante.
Ventajas de la invención Las ventajas derivadas del sistema objeto del invento son notables; entre otras simplificar la instalación, reducir peso y aumentar la seguridad la habitabilidad interior y el confort.
Los elementos de la tecnología conocida que pueden ser eliminados son, básicamente:
- En la dirección: Columna, Piñón, Cremallera, Brazos, Sistema de asistencia (motor, si es eléctrico; o Bomba, Depósitos y Tuberías, si es hidráulica)
- En el sistema de frenado: Servofreno (Conducciones de vacío desde la admisión ó bomba eléctrica de vacío si es de vacío; o Conducción desde la servodirección y Depósitos, si es hidráulico) ; Cilindro maestro en tándem; Repartidor de frenada y Latiguillos de freno en diagonal
- En la Tracción: el ensamblaje de pedal de acelerador y ensamblaje del pedal de embrague
Aunque, en general, no hay una correspondencia biunívoca entre elementos sustituidos y elementos nuevos.
El sistema por cable, de acuerdo con el invento, sustituye al sistema mecánico en su conjunto (consigue la misma funcionalidad usando otros medios) :
El Sistema de dirección conocido, está normalmente compuesto por volante, columna de dirección, piñón, cremallera y brazos de dirección, todos ellos unidos mecánicamente. El sistema de dirección del invento comparte volante, pero desacoplado mecánicamente del resto de elementos y con sensores redundantes, y la parte del brazo de dirección correspondiente a la mangueta. El resto de elementos son sustituidos por el conjunto de centralita, bus de comunicaciones, sistema de alimentación eléctrica, y actuador eléctrico que emulan el funcionamiento del sistema convencional.
El pedal de freno de los sistemas conocidos es complementado por una leva con sensores redundantes en el volante. Se mantiene un pedal que ejerce la función de frenado con prioridad sobre los mandos del volante. La bomba de vacío (servo) , cilindro maestro, y líneas hidráulicas desde ésta hasta los pistones del freno, desaparecen y se sustituyen por el mismo conjunto de centralita, bus de comunicaciones y alimentación eléctrica antes mencionado. Actuadores electrohidráulicos locales a cada rueda aplican presión...
Reivindicaciones:
1. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, caracterizado porque consta de:
a) Cuatro controladores electrónicos (6) , asociados uno a cada una de las ruedas del vehículo, que accionan el correspondiente motor de tracción (3) , el actuador de dirección (2) y el actuador electrohidráulico (4) para el circuito de frenado local;
b) un volante (1) con realimentación para simulación de tacto real;
c) un pedal de freno, que ejerce la función de frenado con prioridad sobre los mandos en el volante (1) ;
d) una unidad central (5) con dos procesadores (51) , (52) que permiten implementar una arquitectura redundante de seguridad; y un módulo (53) de control del motor de realimentación del volante (1) que ejecuta físicamente los comandos de par determinados por la función del sistema de realimentación (11) ;
e) una red de comunicaciones (9) determinista en tiempo y redundante por seguridad;
f) un doble pack de baterías de alta tensión (71) , (72) unidos a través del módulo de interconexión (73) , y desconectables el uno del otro;
g) una red de alimentación de alta tensión (74) que proporciona potencia a los controladores electrónicos (6) , al par motor de tracción (3) , al actuador de dirección (2) , al actuador electrohidráulico (4) y a los convertidores de tensión (74a) , (74b) ; y
h) una red de alimentación redundante de baja tensión (75a) , (75b) .
2. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque cada controlador electrónico (6) consta de, al menos:
- un procesador principal (64) que gestiona las comunicaciones con la unidad central (5) y transfiere en tiempo real las órdenes a los controladores de actuador de dirección (61) , de motor de tracción (62) y de actuador de frenado (63) ;
- un procesador redundante (65) que realiza las mismas funciones que el procesador principal (64) a partir de un bus de 12v auxiliar; de modo que permite seguir teniendo el control de las ruedas incluso con un fallo en la alimentación principal y en el procesador principal (64) ;
- un controlador de motor de tracción (62) que lleva a cabo las órdenes de par recibidas de la unidad central (5) , comunicadas por el procesador principal (64) , y comprueba que se ejecutan según lo esperado;
- un controlador de actuador de dirección (61) , que lleva a cabo las órdenes de ángulo de rueda recibidas de la unidad central (5) , comunicadas por el procesador principal (64) , y comprueba que se ejecutan según lo esperado;
- un controlador de actuador de frenado (63) , que lleva a cabo las órdenes de frenado mecánico recibidas de la unidad central (5) , comunicadas por el procesador principal (64) , y comprueba que se ejecutan según lo esperado.
3. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque el volante (1) con realimentación para simulación de tacto real incluye un sistema de retroalimentación de par.
4. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque la citada arquitectura redundante de seguridad implementada en los procesadores (51) , (52) de la unidad central (5) :
- realiza simultáneamente en un procesador (51) los cálculos de par solicitado a cada uno de los cuatro motores de tracción (3) ; y de forma paralela en el segundo procesador (52) , los cálculos de par; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza simultáneamente en un procesador (51) los cálculos de ángulo objetivo de dirección solicitado a cada una de las cuatro ruedas; y de forma paralela en el segundo procesador (52) los cálculos del ángulo; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza simultáneamente en un procesador (51) los cálculos de presión de frenado mecánico solicitado a cada uno de los cuatro actuadores electrohidráulicos (4) , combinado con frenado regenerativo a través de cada uno de los motores de tracción (3) , que será diferente en función de la situación dinámica del vehículo; y de forma paralela en el segundo procesador (52) los cálculos de presión de frenado mecánico; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel;
- realiza en un procesador (51) el cálculo de la realimentación en cada instante para el volante (1) en función de las condiciones del vehículo;
- implementa, en un procesador (51) los controles dinámicos del vehículo y, además de dichos controles (ABS, ESP, VSC, y similares) , realiza automáticamente las funciones de “diferencial virtual” puesto que no existe ninguna unión física entre las ruedas; y, simultáneamente, realiza estos mismos cálculos en el segundo procesador (52) ; de modo que aumenta la disponibilidad del sistema y lo hace inmune a fallos de primer nivel.
5. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque la citada red de comunicaciones (9) va implementada sobre red determinista redundante en tiempo real con entrega garantizada; de modo que permite una comunicación en tiempo real entre los diferentes elementos.
6. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque el citado doble pack de baterías de alta tensión (71) , (72) se conectan en paralelo; de modo que, en caso de caía de uno de ellos, el módulo de interconexión de las baterías (73) lo desconectaría y se seguiría funcionando en modo seguro de emergencia a partir del otro.
7. Sistema de control de tracción, dirección y frenado de vehículos mediante comunicación por cable, según reivindicación 1, caracterizado porque cada una de las unidades de control (5) , (6) se alimenta de una red separada gracias a dos convertidores de tensión continua (74a) , (74b) que suministran la tensión necesaria a cada una de ellas de la red de alimentación de alta tensión (74) ; y porque una de de las unidades de control (5) , (6) se complementa con una batería auxiliar (8) para el caso en el que pudieran fallar los dos convertidores de tensión (74a) , (74b) ; ó los dos paquetes de baterías de alta tensión (71) , (72) ; ó el módulo de interconexión de batería (73) ; ó varios de ellos de forma simultánea; de modo que se permite continuar funcionando hasta realizar una parada de emergencia controlada.
Patentes similares o relacionadas:
SISTEMAS DE FRENO DE VEHICULOS OPERABLES POR FLUIDO A PRESION., del 16 de Febrero de 1998, de KNORR-BREMSE SYSTEMS FOR COMMERCIAL VEHICLES LIMITED: SISTEMA DE FRENO DE VEHICULO OPERABLE POR UN MULTI-CIRCUITO DE FLUIDO A PRESION, QUE INCLUYE UN DISPOSITIVO DE CONTROL DE DOS SEÑALES , EXCITADO-OPERADO ELECTRICAMENTE, CAPAZ […]
UN SISTEMA DE FRENOS ANTI-BLOQUEO., del 16 de Agosto de 1989, de ALLIED-SIGNAL INC.: UN SISTEMA DE FRENOS ANTI-BLOQUEO COMPRENDE UN CILINDRO DIRECTOR PARA SUMINISTRAR FLUIDO A PRESION A LOS FRENOS DEL VEHICULO Y UNA BOMBA QUE […]