Sistema de control de parcelas.
Sistema de control de parcelas.
Se trata de un sistema de cierre de espacios mediante la instalación de varias estructuras móviles conectadas entre sí mediante tecnología óptica inalámbrica (láser);
se conectan estas estructuras móviles delimitando un espacio mediante una señal óptica (láser), cuando esta conexión se vea interrumpida por la intrusión de algún animal, estas estructuras emitirán señales luminosas y acústicas que provocarán que los animales retrocedan.
Cada estructura móvil llevará incorporada los siguientes elementos:
- Soporte de todos los elementos con un peldaño en la parte inferior y agarraderas en la parte superior.
- Uno o varios emisores y receptores de señales ópticos (láser).
- Unidad de control programable.
- Uno o varios emisores luminosos.
- Mira óptica.
- Uno o varios emisores acústicos.
- Una batería.
- Un panel fotovoltaico y/o un pequeño aerogenerador de electricidad.
- Una carcasa protectora.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200507.
Solicitante: BILEGA ENERGÍA, S.L.
Nacionalidad solicitante: España.
Inventor/es: BALBOA BELTRÁN,Marcos, LÓPEZ DE FIGUEROA,Oscar Luis.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G07C9/00 FISICA. › G07 DISPOSITIVOS DE CONTROL. › G07C APARATOS DE CONTROL DE HORARIOS O DE ASISTENCIA; REGISTRO O INDICACION DEL FUNCIONAMIENTO DE LAS MAQUINAS; PRODUCCION DE NUMEROS AL AZAR; APARATOS PARA VOTAR O APARATOS DE LOTERIA; DISPOSICIONES, SISTEMAS O APARATOS PARA CONTROLES NO PREVISTOS EN OTRO LUGAR. › Registro individual en la entrada o en la salida.
- H05C3/00 ELECTRICIDAD. › H05 TECNICAS ELECTRICAS NO PREVISTAS EN OTRO LUGAR. › H05C CIRCUITOS O APARATOS ELECTRICOS ESPECIALMENTE DISEÑADOS PARA SER UTILIZADOS EN EQUIPOS PARA MATAR, ATURDIR, CERCAR, O GUIAR SERES VIVIENTES (sistemas fijos para capturar o destruir insectos por procedimientos eléctricos A01M 1/22; aparatos para la destrucción de animales dañinos, que no sean insectos, por medio de la electricidad A01M 19/00; trampas eléctricas para animales A01M 23/38; matanza por corriente eléctrica A22B 3/06). › Otros circuitos.
Descripción:
SISTEMA DE CONTROL DE PARCELAS.
La siguiente memona descriptiva tiene por objeto presentar un sistema para controlar el tránsito y movimiento de animales tanto 5 domésticos como salvajes en parcelas agrícolas y/o forestales u otros espacios mediante el empleo de tecnología inalámbrica la cual detectará la presencia de los animales y dará respuesta a los mismos emitiendo señales luminosas y acústicas que provocarán que los animales retrocedan, no entrando o saliendo de la parcela delimitada de forma autónoma sólo necesitando para funcionar su instalación y puesta en marcha del sistema. En el caso de los animales domésticos, el tránsito de los mismos debe controlarse para que no escapen de la zona delimitada para su estancia, no invadiendo propiedades ajenas, ni vías de comunicación en las que puedan ocasionar algún percance. En el caso de animales salvajes, al igual que en el caso anterior, debe evitarse el acceso de los mismos a una vía de comunicación donde puedan ocasionar molestias o percances y también el acceso de los mismos a espacios donde puedan ocasionar
daño, como pueden ser terrenos agrícolas cultivados ocasionando
daños a los cultivos que repercutan negativamente en los titulares de los mismos. Mediante el empleo de esta invención se mantendrá a los animales fuera de zonas donde puedan causar daños o molestias. 5
ANTECEDENTES DE LA INVENCIÓN
Actualmente para evitar este tipo de movimiento se emplean cierres fisicos de distintos tipos.
DESCRIPCIÓN DE LA INVENCIÓN
Se trata de un sistema de CIerre de espaCIOS mediante la instalación de varias estructuras móviles conectadas entre sí
mediante tecnología óptica inalámbrica (láser) que delimitaran un espacio. En caso de que se intente penetrar en el mismo, las balizas emitirán sonidos y luces molestas para los animales que los harán retroceder, cumpliendo así el trabajo encomendado a dicho equipo.
Este sistema se basa en la conexión de dichas estructuras móviles formando una línea o delimitando un espacio mediante una señal óptica (láser) . Cuando esta conexión se vea interrumpida por la intrusión de algún animal, estas estructuras móviles, que llevarán incorporadas un equipo emisor de señales luminosas molestas para los animales así como un equipo de sonido que también emitirá 5 señales acústicas con el fin de que asusten a los animales haciéndoles retroceder, disuadiéndoles de volver a intentar penetrar en dicho espacio. Estas señales, tanto las acústicas como las luminosas, producirán una respuesta modulable en intensidad, produciendo un efecto en los animales breve y sin consecuencias para su bienestar, simplemente les creará la sensación de malestar momentáneo para que no vuelvan a intentar penetrar. Cada una de las estructuras móviles llevará incorporadas los siguientes elementos:
• Soporte de todos los elementos con un peldaño en la parte 15 inferior y agarraderas en la parte superior.
• Uno o varios emisores y receptores de señales ópticos (láser) .
• Unidad de control programable.
• Uno o varios emisores luminosos.
• Mira óptica.
• Uno o varios emisores acústicos encargados de producir las señales acústicas disuasorias.
• Una batería.
• Un panel fotovoltaico y/o un pequeño aerogenerador de 5 electricidad.
• Una carcasa protectora.
La novedad es la utilización de un sistema de señal óptico de detección de presencia de animales que emitirá una señal al control
y que este a su vez dará la orden a los equipos emisores de luz y sonido para que emitan señales molestas para los animales haciéndolos retroceder, no penetrando así en la zona a salvaguardar.
DESCRIPCIÓN DE UNA FORMA DE REALIZACIÓN PREFERIDA
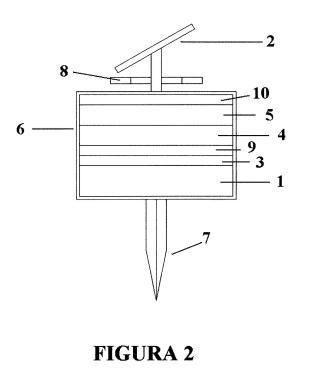
Cada una de las estructuras móviles cuenta con un soporte en el que se acoplan todos los elementos necesarios para su funcionamiento y 20 la batería de alimentación (1) encargada de suministrar y almacenar
la energía necesaria para su funcionamiento. Dicha energía será suministrada por un panel fotovoltaico (2) o por un aerogenerador, dimensionado acorde con la batería y con la autonomía que queramos dotarle a nuestro sistema. La unidad de control (3) se 5 acoplara al soporte al igual que el emisor o emisores acústicos (4) Y emisor o emisores luminosos (5) . Todos los elementos, a excepción del panel fotovoltaico (2) y el aerogenerador, estarán dentro de una carcasa/estructura (6) hermética resistente a las inclemencias meteorológicas para dotar a los elementos más sensibles de mejores 10 condiciones con el fin de alargar la vida útil de los equipos. El soporte llevará acoplada en la parte inferior un eje vertical a modo de peldaño (7) con el fin de usarlo para facilitar su colocación ya que podrán utilizarse como apoyo para su colocación en el suelo. Una vez insertado el soporte en el terreno, estos servirán como elementos de sujeción impidiendo la caída de los mismos. En la parte superior, llevará otro eje vertical a modo de agarradera (8) para facilitar su colocación. Estos 2 ejes tienen como objetivo facilitar su colocación para que esta pueda realizarse manualmente sin tener que emplear herramienta o maquinaria alguna.
Las estructuras móviles se instalarán en el terreno a delimitar, siendo visibles entre si 2 a 2, es decir, el sistema óptico emisor
(láser) de una de ellas debe alcanzar al receptor óptico de otra de las balizas y así sucesivamente quedando conectadas. El emisor óptico (láser) (9) de cada una se conectará con el receptor de la siguiente estructura estableciendo así un cierre no visible a modo de circuito. 5 Para facilitar la conexión de las estructuras móviles, estas llevarán una mira óptica (lO) con el fin de facilitar la conexión inicial entre las distintas estructuras. Cuando haya una intrusión o interferencia en dicho circuito, el emisor óptico (láser) (9) enviará una señal a la unidad de control (3) la cual activará tanto al emisor de señales 10 luminosas (5) como al emisor de señales acústicas (4) que durante un período de tiempo variable (determinado por la unidad de control según la programación que se haya establecido en ella) emitirán señales con el fin de asustar a los animales intrusos haciéndolos retroceder. Cada unidad de control (3) de cada una de las balizas 15 necesitará tanto recibir la señal de la llegada de la señal óptica de otra baliza como enviarla. De no ser así detectará un fallo en el circuito y activará a los emisores ópticos (5) como acústicos (4) . El objetivo es que en caso de intrusión en cualquiera de los puntos del circuito, todas las balizas actúen a la vez, con el fin de aumentar el
efecto disuasorio de este sistema.
Una vez haya finalizado la intrusión, el circuito se rearmará, quedando como inicialmente para volver a actuar en caso de que fuera necesario por alguna otra incursión o alteración en el circuito, y así continuamente hasta que se decida que no es necesarIO su funcionamiento.
El sistema funcionará de forma autónoma gracias a la batería que será cargará mediante el panel fotovoltaico (2) o el aerogenerador y estará dimensionada para que pueda dotar a todo el sistema de una autonomía suficiente para un especio de tiempo considerable con el fin de que este sistema tenga el menor mantenimiento posible.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
Figura 1: Croquis de cómo quedaría instalado sobre el terreno la presente invención, en el cual se ven cuatro estructuras móviles conectadas por la línea de láser, delimitando así el espacio protegido Figura 2: Diseño detallado de cada una de las partes de la estructura. 20
Reivindicaciones:
1. SISTEMA DE CONTROL DE PARCELAS, caracterizado porque consta de unas estructuras móviles, que llevarán 5 incorporadas los siguientes elementos:
• Soporte de todos los elementos con un peldaño (7) en la parte inferior y agarraderas (8) en la parte superior.
• Uno o varios emisores y receptores de señales ópticos (láser) (9) .
• Unidad de control programable (3) .
• Uno o varios emisores luminosos (5) .
• Mira óptica. (10) .
• Uno o varios emisores acústicos (4) .
• Una batería (1 ) .
• Un panel fotovoltaico (2) y/o un pequeño aerogenerador de electricidad.
• Una carcasa protectora (6) .
Patentes similares o relacionadas:
Dispositivo para el control del paso de personas, del 15 de Julio de 2020, de MAGNETIC AUTOCONTROL GMBH: Dispositivo para el control del paso de personas con una esclusa de paso, cuya salida está cerrada por una puerta de salida, la cual se abre a una […]
Cilindro de cierre para una llave electrónica, del 15 de Julio de 2020, de AUG. WINKHAUS GMBH & CO. KG: Cilindro de cierre para una llave electrónica , con un núcleo móvil dentro de una carcasa , con un canal de bloqueo dispuesto […]
DETECTOR DE TEMPERATURA PARA ACCESO A ESTABLECIMIENTOS., del 25 de Junio de 2020, de GIL SANZ, Jose Antonio: 1. Detector de temperatura para acceso a establecimientos, caracterizado por que está constituido a partir de una carcasa alargada verticalmente, a modo de columna, con su […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 24 de Junio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas diferentes […]
Sistemas y métodos para compartir documentos de identidad verificados, del 3 de Junio de 2020, de Trunomi Ltd: Un método para autorizar una divulgación de información de identidad, que comprende: en un dispositivo de cliente (102-1, 102-n) con uno o más procesadores […]
Métodos y sistemas para la gestión de intercambio de llaves, del 13 de Mayo de 2020, de Keycafe Inc: Un procedimiento para facilitar el intercambio asíncrono de un conjunto de llaves entre las partes a través de múltiples centros de intercambio de llaves […]
Sistemas y método de control de acceso que utiliza un teléfono inteligente, del 13 de Mayo de 2020, de HONEYWELL INTERNATIONAL INC.: Un sistema de acceso de la puerta que comprende: un identificador de puerta legible asociado con una primera de entre una pluralidad de puertas, […]
Método para determinar la distancia entre dos nodos de presencia, del 13 de Mayo de 2020, de Nida Tech Sweden AB: Un método en un primer nodo de presencia adaptado para determinar la distancia entre dicho primer nodo de presencia y un segundo nodo de presencia […]