Sistema de clasificación de artículos.
Sistema de clasificación de artículos (10) que comprende:
un dispositivo de accionamiento de rotación (12a);
una cadena sin fin (14) que gira a lo largo de un recorrido de transporte de un artículo (16, 16x) mediante el dispositivo accionador de rotación (12a);
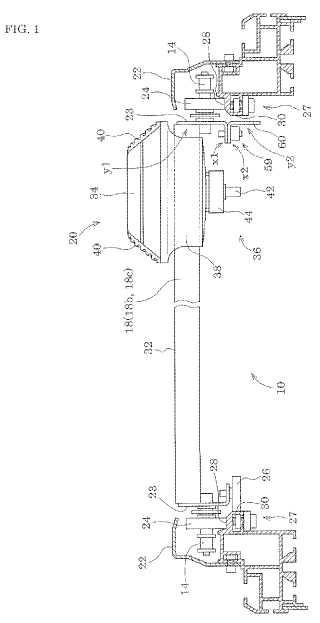
una pluralidad de soportes de artículos (18, 18a, 18b, 18c) unidos a la cadena sin fin (14), teniendo los soportes de artículos (18, 18a, 18b, 18c) unas superficies de colocación de artículos (32) en forma de bandas y unas unidades detectadas acopladas (60), que pueden moverse a lo largo de un recorrido de movimiento;
un empujador lateral de artículos (20) unido al soporte de artículos (18, 18a, 18b, 18c), pudiendo moverse el empujador lateral de artículos (20) a lo largo del soporte de artículos (18, 18a, 18b, 18c) con el fin de empujar el artículo (16, 16x);
dos dispositivos de detección (62) previstos en el recorrido de movimiento de las unidades detectadas (60), sirviendo los dispositivos de detección (62) para detectar el paso de las unidades detectadas (60); caracterizado porque las unidades detectadas (60) están previstas en extremos de los soportes de artículos (18, 18a, 18b, 18c), uno de los soportes de artículos (18a) está provisto de las unidades detectadas (60) en sus dos extremos, dichos dos dispositivos de detección (62) están dispuestos de manera que detectan ambas unidades detectables al mismo tiempo, y otros soportes de artículos (18b, 18c) están provistos respectivamente con las unidades detectadas (60) en uno u otro de sus extremos, y
porque los soportes de artículos (18b) provistos con las unidades detectadas (60) en uno de sus extremos y los soportes de artículos (18c) provistos con las unidades detectadas (60) en el otro de sus extremos están alineados en alternancia en la dirección de transporte del artículo (16, 16x).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11176406.
Solicitante: DAIFUKU CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 2-11 Mitejima 3-chome Nishiyodogawa-ku Osaka-shi Osaka 555-0012 JAPON.
Inventor/es: ONAYAMA,MANABU.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G43/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 43/00 Dispositivos de control, p. ej. de seguridad, de alarma, de corrección de errores. › Dispositivos de control accionados por la alimentación, el desplazamiento o la descarga de objetos o materiales.
- B65G47/84 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Ruedas con forma de estrellas o dispositivos de correas o cadenas sin fin, estando dotadas las ruedas o dispositivos de elementos que enganchan a los objetos.
PDF original: ES-2422205_T3.pdf
Fragmento de la descripción:
Sistema de clasificación de artículos.
CAMPO TÉCNICO DE LA INVENCIÓN
La presente invención se refiere a un sistema de clasificación de artículos para clasificar artículos durante su transporte.
ESTADO DE LA TÉCNICA
Convencionalmente en la industria de la logística se han desarrollado y descrito diversos sistemas de clasificación (véase por ejemplo la publicación japonesa nº 2009-249121) . Se proporciona un sistema de clasificación 100 con una pluralidad de listones (soportes para artículos) 18 donde se colocan y transportan los artículos 16 y patines (empujadores laterales para los artículos) 20 unidos a los listones 18 (figuras 14, 15) .
Los listones 18 están unidos a unas cadenas sin fin 14. Las cadenas sin fin 14 están dispuestas de forma que dan vueltas alrededor de una rueda motriz dentada 12a y una rueda dentada conducida 12b. La rueda motriz dentada 12a tiene acoplado un motor. El motor hacer girar esta rueda motriz dentada 12ª de modo que las cadenas sin fin 14 también giran.
Cada uno de los listones 18 está orientado en una dirección ortogonal respecto a la dirección de transporte de los artículos 16. Entre el listón 18 y las cadenas sin fin 14 están previstos un rodillo móvil 24 y un rodillo lateral 26. Cuando se hacen girar las cadenas sin fin 14, el rodillo móvil 24 se mueve a lo largo de un carril de listón 28. El rodillo lateral 26 está guiado por una superficie de guía lateral 30. Cada uno de los patines 20 está provisto de una parte superior 34 en el lado de la superficie de colocación 32, una parte inferior 36 en el lado opuesto a la parte superior y una parte lateral 38 que une ambas partes superior 34 e inferior 36. El patín 20 es envolvente en una vista en sección ortogonal a la dirección de transporte y está acoplado de modo que rodea parte del listón 18. Cuando se coloca cada uno de los artículos 16 sobre la superficie de colocación 32, el patín 20 está dispuesto en uno de los extremos del listón 18. La parte superior 34 empuja lateralmente el artículo 16. La parte inferior 36 mueve el patín 20 a lo largo del listón 18. En la parte inferior 36 está previsto un eje de rotación 42, que tiene unido un rodillo guía 44 de manera que puede girar libremente.
El sistema de clasificación 100 está provisto de múltiples partes de guía ramificadas 102, en la figura 16, con el fin de mover el patín 20. Cada una de las partes de guía ramificadas 102 está provista de unos carriles guía de avance 50, un carril guía de movimiento 52 y un medio de distribución 104. En el medio de distribución 104 está previsto un electroimán 56. El rodillo guía 44 está provisto de un cuerpo magnético. Si se alimenta energía eléctrica al electroimán 56, el electroimán 56 atrae al rodillo guía 44. El rodillo guía 44 es conducido hasta el carril guía de movimiento 52, con lo que el patín 20 se mueve a lo largo del listón 18. En este momento, el patín 20 empuja lateralmente el artículo 16 en dirección ortogonal a la dirección de transporte. Al ser empujado lateralmente, el artículo 16 se mueve hasta un transportador de ramificación 48. Si no se alimenta energía eléctrica al electroimán 56, el rodillo guía 44 avanza a lo largo de los carriles guía de avance 50. El patín 20 no se mueve a lo largo del listón 18.
En el documento JP-A-2009-249121 se describe un método para determinar la distancia de movimiento de un artículo 16 mediante un codificador de impulsos 106 con el fin de decidir si se debe alimentar o no energía eléctrica al electroimán 56. El codificador de impulsos 106 está conectado a un eje de rotación de la rueda dentada conducida 12b. Se calcula la distancia de movimiento de las cadenas sin fin 14 en base a los impulsos contados por el codificador 106. La distancia de movimiento del artículo se calcula en base a los impulsos después de que el artículo 16 haya sobrepasado una posición predeterminada P1. Cuando este cálculo da como resultado una distancia que indica que el artículo 16 llega a una posición predeterminada P2 del electroimán 56, se alimenta energía eléctrica al electroimán 56 (figura 17) . El patín 20 se mueve a lo largo del listón 18, con lo que el artículo 16 es empujado lateralmente con relación a la dirección de transporte.
Sin embargo, a veces el resultado del cálculo de la distancia de movimiento del artículo 16 no coincide con la distancia de movimiento real debido al alargamiento de las cadenas sin fin 14. Aunque se realice una corrección de los impulsos o similar, no es perfecto. Cuando no es posible obtener con exactitud la distancia de movimiento del artículo 16, existe el peligro de que no se clasifique el artículo 16 en una posición predeterminada. Si se mueve el patín 20 no predeterminado, a veces se producen accidentes. El patín 20 está dispuesto en el extremo del listón 18 y se mueve a lo largo del listón 18 cuando empuja lateralmente el artículo 16. Supongamos, por ejemplo, que se están transportando dos artículos 16b, 16c, como en la figura 18 (a) y que todos los patines 20 están situados en un extremo de los listones 18. Cuando al principio se clasifica el artículo trasero 16c, los patines 20 que ya han empujado lateralmente el artículo 16c quedan situados en los otros extremos (figura 18 (b) ) . A continuación se clasifica el artículo delantero 16b. En este momento, el artículo 16b es dirigido en una dirección oblicua a la dirección de transporte y se desplaza sobre los listones circundantes. Al someter el artículo 16b a un empuje lateral continuo (figura 18 (c) ) , el artículo 16b es 'pellizcado' por los patines 20. Esto puede causar un accidente en el que el artículo 16b y los patines 20 resulten dañados. Teniendo esto en cuenta no es posible acortar el intervalo entre los artículos, lo que disminuye la eficacia de clasificación de los mismos.
Si el resultado del cálculo de la distancia de movimiento del artículo 16 no coincide con la distancia de movimiento real debido al alargamiento de las cadenas sin fin 14, no es posible mover el patín deseado. Por tanto, para clasificar el artículo 16 existe la necesidad de poder mover sin fallos el patín 20 deseado.
Además, si el patín 20 está dañado no es posible clasificar el artículo 16. Por ejemplo, si el rodillo guía 44 del patín 20 está dañado, el medio de distribución 104 no puede seleccionar los carriles 50, 52. Si la parte superior 34 del patín 20 está en condiciones normales, los daños en el patín 20 no pueden percibirse a primera vista. Por tanto, los daños en el patín 20 se pasan por alto y el artículo 16 no puede ser enviado al transportador de ramificación 48 deseado. Dado que no es posible desviar el artículo 16, el artículo 16 se devuelve a un lado situado aguas arriba mediante un transportador de exclusión y se reclasifica.
Si no se obtiene la posición del patín 20 como se ha descrito más arriba, se tarda en descubrir el patín 20 dañado, por lo que el restablecimiento lleva su tiempo. Disminuye la eficacia de clasificación para el artículo 16.
El documento JP 58-162432 A describe un sistema de clasificación de artículos que comprende:
- un dispositivo accionador de rotación;
- una cadena sin fin que gira a lo largo de un recorrido de transporte de un artículo mediante el dispositivo accionador de rotación;
- una pluralidad de soportes de artículo unidos a la cadena sin fin, teniendo los soportes de artículo unas superficies de colocación de artículo en forma de banda y unas unidades detectadas acopladas, que pueden moverse a lo largo de un recorrido de movimiento;
- un empujador lateral de artículos unido al soporte de artículos, pudiendo moverse el empujador lateral de artículos a lo largo del soporte de artículos con el fin de empujar dicho artículo; y
- un dispositivo de detección previsto en un recorrido de movimiento de las unidades detectadas, sirviendo el dispositivo de detección para detectar el paso de las unidades detectadas;
estando las unidades detectadas previstas en los extremos de los soportes de artículos.
En este sistema no está asegurado un control preciso de cualquier anomalía del transportador cuando funciona a alta velocidad.
SUMARIO DE LA INVENCIÓN
Así, un objeto de la presente invención es proporcionar un sistema de clasificación de artículos para empujar lateralmente un artículo en un punto predeterminado de forma fiable. Otro objeto de la presente invención es proporcionar un sistema de clasificación de artículos para impedir accidentes donde el artículo se ha 'pellizcado' por patines, con el fin de aumentar la eficacia de clasificación del artículo. Otro objeto de la presente invención es proporcionar un sistema de clasificación... [Seguir leyendo]
Reivindicaciones:
1. Sistema de clasificación de artículos (10) que comprende:
un dispositivo de accionamiento de rotación (12a) ;
una cadena sin fin (14) que gira a lo largo de un recorrido de transporte de un artículo (16, 16x) mediante el dispositivo accionador de rotación (12a) ;
una pluralidad de soportes de artículos (18, 18a, 18b, 18c) unidos a la cadena sin fin (14) , teniendo los soportes de artículos (18, 18a, 18b, 18c) unas superficies de colocación de artículos (32) en forma de bandas y unas unidades detectadas acopladas (60) , que pueden moverse a lo largo de un recorrido de movimiento;
un empujador lateral de artículos (20) unido al soporte de artículos (18, 18a, 18b, 18c) , pudiendo moverse el empujador lateral de artículos (20) a lo largo del soporte de artículos (18, 18a, 18b, 18c) con el fin de empujar el artículo (16, 16x) ;
dos dispositivos de detección (62) previstos en el recorrido de movimiento de las unidades detectadas (60) , sirviendo los dispositivos de detección (62) para detectar el paso de las unidades detectadas (60) ;
caracterizado porque las unidades detectadas (60) están previstas en extremos de los soportes de artículos (18, 18a, 18b, 18c) , uno de los soportes de artículos (18a) está provisto de las unidades detectadas (60) en sus dos extremos, dichos dos dispositivos de detección (62) están dispuestos de manera que detectan ambas unidades detectables al mismo tiempo, y otros soportes de artículos (18b, 18c) están provistos respectivamente con las unidades detectadas (60) en uno u otro de sus extremos, y
porque los soportes de artículos (18b) provistos con las unidades detectadas (60) en uno de sus extremos y los soportes de artículos (18c) provistos con las unidades detectadas (60) en el otro de sus extremos están alineados en alternancia en la dirección de transporte del artículo (16, 16x) .
2. Sistema de clasificación de artículos (10) según la reivindicación 1, caracterizado porque las unidades detectadas (60) están fijadas en el lado opuesto a las superficies de colocación de artículos (32) .
3. Sistema de clasificación de artículos (10) según la reivindicación 2, caracterizado porque además comprende:
un carril guía de avance (50) para guiar el empujador lateral (20) a lo largo de la dirección de transporte;
un carril guía de movimiento (52) para mover el empujador lateral de artículos (20) a lo largo de los soportes de artículos (18, 18a, 18b, 18c) ; y
una unidad (54) para distribuir el empujador lateral de artículos (20) al carril guía de avance (50) o al carril guía de movimiento (52) , estando los dispositivos de detección (62) previstos en un lado situado aguas arriba en la dirección de transporte con relación a la unidad (54) de distribución.
4. Sistema de clasificación de artículos (10) según la reivindicación 3, caracterizado porque los dispositivos de detección (62) incluyen respectivamente:
una unidad emisora de luz (64) para emitir luz y una unidad receptora de luz (66) que recibe la luz, y las unidades detectadas (60) se detectan basándose en el bloqueo de la luz por las unidades detectadas (60) .
5. Sistema de clasificación de artículos (10) según la reivindicación 4, caracterizado porque los dispositivos de detección (62) tienen respectivamente dos unidades emisoras de luz (64) y dos unidades receptoras de luz (66) y la dirección de transporte del artículo (16, 16x) se determina basándose en la cronometría cuando se bloquea la luz dirigida hacia las unidades receptoras de luz (66) .
Dirección de transporte Codificador deimpulsos La distancia de movimiento se calcula Impulsobasándose en los impulsos contados
Patentes similares o relacionadas:
Aparato y método para envasar bolsitas, del 3 de Junio de 2020, de Universal Pack S.r.l: Aparato para el envasado de bolsitas que comprende: - una unidad de envasado primaria configurada para suministrar dichas bolsitas […]
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato para recibir y transportar una corriente de huevos, del 22 de Abril de 2020, de Moba Group B.V: Aparato para recibir y transportar una corriente de huevos, que comprende, - una transportadora para transportar huevos (E) en una dirección de transporte T, […]
Aparato de transporte para una máquina de envasado de pasta alimenticia, productos granulares y similares, del 22 de Abril de 2020, de ALTOPACK S.P.A.: Aparato de transporte capaz de transportar horizontalmente una pluralidad de envases que contienen alimentos, que comprende una cadena de bucle cerrado que se […]
Aparatos de transporte, del 15 de Abril de 2020, de FUJI MACHINERY CO., LTD: Un aparato de transporte que comprende: una sección de soporte configurada para soportar una pluralidad de artículos (P) sobre la misma […]
Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance, del 1 de Abril de 2020, de MARCHESINI GROUP S.P.A.: Un aparato para desplazar artículos que avanzan continuamente a lo largo de una dirección de avance (A), teniendo los artículos que ser desplazados y empujados transversalmente, […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de transporte y método de producción de artículos ponibles desechables mediante su uso, del 27 de Noviembre de 2019, de ZUIKO CORPORATION: Un dispositivo de transporte para transportar un objeto (A) a una superficie de una lámina (S1, S2), que comprende: un rodillo de entrega […]