Sistema de accionamiento de piñón cremallera para múltiples mástiles.
Sistema de accionamiento o arrastre para plataformas elevadoras,
ascensores o montacargas movidos por un accionamiento de piñón y cremallera, incluyendo dicho sistema un motor (9), un reductor (4), una rueda libre en dos partes giratorias (6, 7) y un freno centrífugo (5), caracterizado porque el freno centrífugo está acoplado directamente a un árbol rápido (11) del reductor, accionando el motor una de las dos partes giratorias de la rueda libre, según un sentido de rotación y porque la rueda libre (6, 7) está insertada entre el motor (9) y el reductor (4) .
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2008/050800.
Solicitante: XL DEVELOPPEMENT.
Nacionalidad solicitante: Francia.
Dirección: 12 CHAUSSEE JULES CESAR B.P. 219 OSNY 95523 CERGY PONTOISE CEDEX FRANCIA.
Inventor/es: LOMBARD, XAVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B11/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 11/00 Partes constitutivas principales de los ascensores instalados en los edificios o adyacentes a éstos. › Mecanismos de accionamiento.
- B66B5/02 B66B […] › B66B 5/00 Utilización de dispositivos de verificación, de rectificación de mal funcionamiento, de seguridad en ascensores. › que reaccionan ante condiciones de funcionamiento anormales.
- B66B9/02 B66B […] › B66B 9/00 Clases o tipos de ascensores instalados en los edificios o adyacentes a éstos (caracterizados por el sistema de control B66B 1/00). › accionados mecánicamente de forma diferente a por cables o calabrotes.
PDF original: ES-2421334_T3.pdf
Fragmento de la descripción:
Sistema de accionamiento de piñón cremallera para múltiples mástiles El presente invento se refiere a plataformas autoelevadoras, ascensores, montacargas movidos por un accionamiento de piñón y cremallera guiado a lo largo de uno o varios mástiles que se llamarán para simplificar máquinas de desplazamiento vertical. Un sistema de accionamiento según el preámbulo de la reivindicación 1 es conocido por ejemplo del documento GB-A-2130682.
El invento tiene como finalidad proponer perfeccionamientos en el sistema de accionamiento, principalmente para reducir los esfuerzos externos en caso de avería y también para mejorar sensiblemente la seguridad.
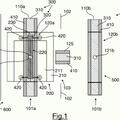
Según un primer aspecto del invento, se inserta entre cada motor y cada reductor un conjunto de freno centrífugo/rueda libre situado en una campana de acoplamiento 8. El orden en la cadena cinemática - (véase fig. 1) - partiendo del piñón de la cremallera 1 es el siguiente: Árbol lento del reductor 3, una o varias etapas de reducción 4, freno centrífugo 5, parte accionada de la rueda libre 6, parte que acciona de la rueda libre 7, rotor motor 9, freno de falta de corriente que bloquea el rotor sobre el estator 10 (Fig. 1) .
Cuando el motorreductor gira en el sentido del ascenso o subida (flecha 30) , el motor hace girar una parte de la rueda libre que acciona a la otra parte solidaria 8 del freno centrífugo y del reductor. Se puede decir que el acoplamiento rueda libre está embragado o engranado.
Cuando la máquina solidaria de la campana de acoplamiento 8 es detenida, esta última tiene tendencia a hacer girar el reductor en el sentido del descenso, inverso de la flecha 30; pero éste es bloqueado por el freno del motor acoplado al reductor por la rueda libre.
Cuando la máquina desciende, esta última acciona el reductor que es frenado por el motor, el cual trabaja como generador. La rueda libre está desde luego engranada. Por el contrario, si la máquina se coloca sobre un obstáculo, figurado por una cuña 32 o sobre el suelo, el o los reductores dejan de girar mientras que el o los motores continúan girando.
Se obtiene el mismo resultado y el mismo grado de seguridad insertando la rueda libre 6, 7 entre el motor 9 y el reductor 4 y acoplando el freno centrífugo 5 a un segundo árbol rápido 11 del reductor (Fig. 1 bis) .
En un accionamiento rígido clásico, si la máquina encuentra un obstáculo en su carrera o recorrido de descenso, ejerce sobre este último una fuerza igual a su propio peso + una fuera igual al menos a 2 veces su propio peso a capacidad de carga máxima, ya que un motor en situación de bloqueo entrega un par doble de su par nominal.
Así, a título de ejemplo, una máquina que pesa 1000 Kg de peso propio y capaz de transportar 1000 Kg de carga útil ejercerá sobre un obstáculo en descenso una fuerza comprendida entre 1000 y 2000 Kg según que no esté cargada o lo esté, si el o los motorreductores están equipados de rueda libre, y una fuerza comprendida entre 5000 y 6000 Kg si no están equipados con ella.
Para ayudar a la comprensión del sistema, se puede dar esta imagen.
Un acoplamiento rígido es comparable a una máquina que fuera accionada por un grupo motor y unida a este último por una barra rígida.
Un acoplamiento con rueda libre es comparable a una máquina que fuera accionada por un grupo motor suspendida de este último por un cable flexible. En el descenso si la máquina encuentra un obstáculo, el cable se distiende. La rueda libre corresponde a un cable de longitud infinita, pero que no se enreda nunca y no se queda flojo.
Esta técnica asociada a la utilización de varias máquinas que deben trabajar juntas, es decir a la misma velocidad, sobre mástiles diferentes o no aporta un perfeccionamiento importante. En efecto, imagínese una máquina sostenida por dos mástiles situados a una y otra parte (fig. 6) .
En la solución de accionamiento rígido, es preciso, o bien poner un árbol de sincronización mecánico, lo que no siempre es posible o fácil, en particular si el entre eje de los mástiles es variable, o si los mástiles están repartidos sobre los contornos de una pared convexa o cóncava o bien dimensionar el sistema de guiado y de sustentación de tal manera que, en caso de bloqueo del sistema de accionamiento por un lado, la estructura sea capaz de retomar la mitad del peso propio y de la carga útil + 2 veces este valor, es decir una vez y media las masas totales en movimiento previstas para ser levantadas por dos mástiles.
En la solución del invento, basta que la estructura resista a un desequilibrio de la mitad de las masas en movimiento, lo que es tres veces menor que en la solución clásica.
Imagínese una máquina de dos mástiles de 1000 Kg de peso propio y de 1000 Kg de capacidad de carga, o sea 2000 Kg en total o 1000 Kg por mástil. Cada sistema de accionamiento está por tanto dimensionado para levantar 1000 Kg.
En caso de bloqueo de un motorreductor en descenso, en la solución clásica, el otro motorreductor empujará hacia abajo 2000 Kg de fuerza a la que es preciso añadir la mitad de las masas en movimiento, es decir 1000 Kg, o sea una fuerza hacia abajo de 3000 Kg.
En la solución del invento, el otro motor girará en vacío, no creando ningún empuje hacia abajo. La fuerza total que debe ser capaz de retomar la estructura será la mitad de las masas en movimiento o sea 1000 Kg.
Además, en la solución clásica, el motor reductor bloqueado debe ser capaz de retomar una fuerza total extrema de 4000 Kg mientras que en la solución del invento, una capacidad extrema de 2000 Kg es suficiente.
Finalmente, si se utiliza un árbol de sincronización mecánica, en la solución clásica, deberá ser capaz de retomar un par generado por la fuerza de 3000 Kg mientras que en la solución del invento, deberá tenerse en cuenta para el dimensionamiento el par generado por una fuerza máxima de 1000 Kg.
Este invento se aplica también para un número superior de máquinas que trabajan juntas sobre varios mástiles. Es particularmente interesante en el caso de plataformas de forma sensiblemente cuadrada o circular.
En un primer caso, imagínense cuatro mástiles situados cada uno en el ángulo de un cuadrado que sería una máquina. Si uno de los sistemas de accionamiento no retiene ya la carga, esta última es retomada por los dos mástiles situados sobre la otra diagonal, sirviendo el último mástil para mantener el equilibrio. Los 4 sistemas de de accionamiento trabajan, para dar una imagen, como las cuatro eslingas de elevación que estarían enganchadas a las 4 esquinas de una carga sensiblemente cuadrada. Si una de las 4 eslingas se distiende, la carga es automáticamente retomada por las 2 eslingas de la otra diagonal.
En un segundo caso, es decir el de una plataforma circular, que trabaja alrededor de una pila de puente o de una chimenea, la ventaja proporcionada por el invento es también interesante. La comparación con la manera de trabajar de una eslinga de 4 ramales o cordones se aplica de la misma manera a este caso.
Según un segundo aspecto del invento, se asocia al mando de los diferentes motor del equipados de rueda libre un sistema eléctrico que mide la diferencia de intensidad entre los diferentes motores.
Todo el mundo sabe que cuando motor trifásico está equilibrado, la intensidad sobre cada fase es sensiblemente igual. Tómese como ejemplo, una máquina equipada con dos motores que accionan dos reductores por medio de dos ruedas libres (fig. 2) . Si se hace pasar la fase L3 16 del motor M1 17 y las fases L1 18 y L2 19 del motor M2 20 en una torre 12, no se inducirá una corriente en esta última más que sí existe un desequilibrio entre las tres fases. Basta determinar la diferencia máxima aceptable en un tiempo dado y hacer de manera que un disyuntor diferencial 13 asociado a la torre corte o interrumpa más allá de estos dos valores Li y Lt predeterminados, o de una integral Li durante un tiempo Lt. Cortará entonces la alimentación de la bobina 14 del contactor KM1 15. La fig. 2 bis representa el esquema de principio para seis motores.
Véase a continuación cómo va a reaccionar el sistema en los diferentes casos:
En ascensión o subida si un motor reductor asociado a un motor es bloqueado, este motor consumirá seis veces su intensidad nominal, mientras que los otros dos no consumirán como máximo más que 1, 5 veces su intensidad nominal, pues no serán impedidos de subir por el hecho de que una rueda libre está insertada entre el motor bloqueado y su reductor. El disyuntor diferencial cortará a Lt.
En ascensión, si un motor reductor asociado a un motor gira en vacío (rueda de reductor rota, chaveta inoperante, rueda... [Seguir leyendo]
Reivindicaciones:
1. Sistema de accionamiento o arrastre para plataformas elevadoras, ascensores o montacargas movidos por un accionamiento de piñón y cremallera, incluyendo dicho sistema un motor (9) , un reductor (4) , una rueda libre en dos partes giratorias (6, 7) y un freno centrífugo (5) , caracterizado porque el freno centrífugo está acoplado directamente a un árbol rápido (11) del reductor, accionando el motor una de las dos partes giratorias de la rueda libre, según un sentido de rotación y porque la rueda libre (6, 7) está insertada entre el motor (9) y el reductor (4) .
2. Sistema de accionamiento según la reivindicación 1 caracterizado por el hecho de que la rueda libre está dispuesta entre el motor y el reductor y de que el freno centrífugo está dispuesto sobre un segundo árbol rápido del reductor.
3. Sistema de accionamiento según una de las reivindicaciones 1 a 2 caracterizado por el hecho de que varios motorreductores engranan sobre una misma cremallera (2) (fig. 4) .
4. Sistema de accionamiento según una de las reivindicaciones 1 a 3 caracterizado por el hecho de que varios motorreductores engranados sobre varias cremalleras paralelas accionan una misma máquina particularmente de forma cuadrada o circular (fig. 5) .
5. Sistema de accionamiento según una de las reivindicaciones precedentes caracterizado por el hecho de que varias máquinas que circulan juntas sobre varios mástiles son sincronizadas por ruedas y cadenas (39) o árboles y piñones que hacen pasar un par aproximadamente 3 veces inferior al necesario en un sistema sin rueda libre.
6. Sistema de accionamiento según una de las reivindicaciones precedentes caracterizado por el hecho de que comprende medios para medir las diferencias de consumo eléctrico entre diferentes motores por un sistema de una o varias torres, asociados a tantos disjuntores diferenciales, que cortan la alimentación en caso de exceder de un umbral de seguridad, siendo determinados estos excesos en porcentaje de diferencia de intensidad durante un tiempo dado.
7. Sistema de accionamiento según una de las reivindicaciones precedentes caracterizado por el hecho de que incluye medios para medir el par generado por la carga sobre cada motorreductor montado como un péndulo con ayuda de medidores de tensión, a fin de medir la carga global sobre la máquina y hacer detener la máquina en caso de que haya diferencias que excedan durante un tiempo dado de los umbrales predeterminados de seguridad.
8. Sistema de accionamiento según una de las reivindicaciones precedentes, caracterizado por el hecho de que incluye, en caso de corte de la alimentación eléctrica, una batería, asociada o no a un ondulador o inversor para abrir simultáneamente el conjunto de los frenos de falta de corriente a fin de volver a descender por gravedad, siendo la velocidad regulada por frenos centrífugos presentes sobre cada motorreductor.
Patentes similares o relacionadas:
SISTEMA PARA EL AVANCE DE ASCENSORES Y MONTACARGAS, del 14 de Enero de 2020, de JOSÉ ALAPONT BONET, S.L: El sistema comprende un par de guías (3, 3'), con sección transversal conformada en "U" y ubicadas con las aberturas enfrentadas, un par de ruedas , fijadas […]
Método y dispositivo para el suministro de alimentación para ascensores de piñón y cremallera, del 13 de Septiembre de 2019, de Alimak Hek AB: Un método para lograr un sistema de suministro de alimentación para una ascensor del tipo en el que la maquinaria de accionamiento está soportada por […]
Montaje de ascensor, del 7 de Agosto de 2019, de KONE CORPORATION: Montaje de ascensor, que comprende una cabina de ascensor ; cabina de ascensor que está suspendida en el hueco de ascensor con medios de suspensión […]
Máquina de ascensor residencial con tambor de arrollamiento de cable, del 20 de Marzo de 2019, de GOBERNADO TEJEDOR, Álvaro: Máquina de ascensor residencial con tambor de arrollamiento de cable, de los que tienen un motor con una reductora asociada a un […]
Sistema de propulsión lineal, del 6 de Febrero de 2019, de OTIS ELEVATOR COMPANY: Una máquina de propulsión lineal que comprende: un primer estátor , incluyendo el estátor una pluralidad de dientes ; y un primer […]
 Sistema de montacargas, del 15 de Enero de 2019, de THYSSENKRUPP ELEVATOR AG: Sistema de montacargas con al menos dos cajas de montacargas (101a, 101b) y al menos una jaula de montacargas ,
en donde en una primera caja […]
Sistema de montacargas, del 15 de Enero de 2019, de THYSSENKRUPP ELEVATOR AG: Sistema de montacargas con al menos dos cajas de montacargas (101a, 101b) y al menos una jaula de montacargas ,
en donde en una primera caja […]
Comunicación inalámbrica de ascensor y sistema de transferencia de potencia, del 12 de Diciembre de 2018, de OTIS ELEVATOR COMPANY: Un sistema de ascensores, que comprende: una cabina de ascensor dispuesta en y construida y dispuesta para moverse a lo largo de un […]
Amortiguador de vibración para sistema de propulsión lineal de ascensor, del 12 de Septiembre de 2018, de OTIS ELEVATOR COMPANY: Un conjunto de propulsión lineal para impartir una fuerza sobre una cabina en un hueco de ascensor de un sistema de […]