Procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar.
Procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral (10) a altura variable sobre lasuperficie (12) a captar,
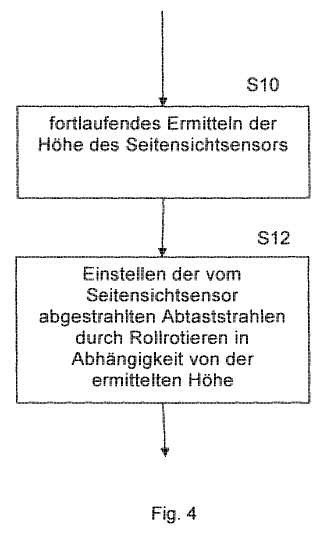
que comprende los pasos siguientes:
- obtención continua de la altura del sensor de visión lateral sobre la superficie a captar (S10) y
- ajuste de los haces de exploración radiados por el sensor de visión lateral para explorar la superficie a captarmediante rotación de balanceo en función de la altura obtenida del sensor de visión lateral de tal manera que sereduzca una variación - dependiente de la distancia del sensor de visión lateral a la superficie - de una franjailuminada (14; 141, 142) de la superficie a captar a lo largo de la órbita del sensor de visión lateral (S12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09007125.
Solicitante: ASTRIUM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Robert-Koch-Str. 1 82024 Taufkirchen ALEMANIA.
Inventor/es: VOLKER, MICHAEL, DR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64G1/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › Satélites artificiales; Sus sistemas; Vehículos interplanetarios (transbordadores espaciales B64G 1/14; sistemas de radiotransmisión que utilizan satélites H04B 7/185).
- B64G1/24 B64G 1/00 […] › Aparatos de guiado o control, p. ej. para control de la actitud (grupos propulsores a chorro F02K; navegación o instrumentos de navegación, ver las clases apropiadas, p. ej. G01C; pilotos automáticos G05D 1/00).
- G01S13/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para la cartografía o la formación de imágenes.
- G01S13/90 G01S 13/00 […] › que utilizan técnicas de apertura sintética.
PDF original: ES-2415170_T3.pdf
Fragmento de la descripción:
Procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar.
La invención concierne a un procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar según la reivindicación 1.
Los sensores activos de visión lateral o los instrumentos activos de visión lateral trabajan según el principio de la medición del tiempo de propagación por medio de RADAR (Radiowave Detection And Ranging – detección y medición de distancias por radioondas) o LIDAR (Lightwave Range And Detection – medición de distancias y detección por ondas luminosas) y se utilizan, por ejemplo, para la medición y la formación de imágenes de la superficie terrestre por medio de satélites. Un ejemplo de un sensor activo de visión lateral es el sistema de radar de apertura sintética (SAR) , que se denomina también radar de visión lateral. Los sistemas SAR se hacen funcionar de modo que, alternativamente, se radian señales de impulsos a una distancia temporal definida, en dirección a la superficie a captar, por medio de una corta antena movida, y se reciben las señales de eco, es decir, las señales de impulsos reflejadas en objetos explorados. Para cada zona iluminada y explorada por la antena se calcula por un procesador SAR, mediante un procesamiento de datos correspondiente de las señales de eco, una imagen del objeto explorado.
Los detectores de visión lateral, como, por ejemplo, los sistemas SAR, iluminan transversalmente a la dirección de vuelo una zona o franja (swath) de una superficie a captar o a medir (o de un volumen atmosférico) y reciben señales de eco provenientes de dicha zona o franja. En toda la trayectoria de circunvalación de un sensor permanece usualmente igual – por ejemplo, en el sentido de una orientación con relación a la dirección de vuelo y la dirección nadir – la dirección de visualización del sensor, es decir las señales de impulsos (haces de exploración) emitidas. Aun cuando se definan diferentes franjas (zonas de ángulo de visualización) , que pueden elegirse libremente, por ejemplo, con ayuda de una antena RADAR controlada en fase) , permanece entonces de por sí igual la orientación de cada franja en toda la circunvalación (órbita) del sensor alrededor del cuerpo celeste a medir. No obstante, varía la distancia entre un sensor de visión lateral y la superficie a captar en trayectorias elípticas y en torno a cuerpos celestes no esféricamente simétricos, tal como puede apreciarse en la figura 1.
Por tanto, el comportamiento temporal durante una toma o exploración depende considerablemente de la altura sobre la superficie de medida y de la zona a captar. Si se hace funcionar, por ejemplo, un sensor activo de visión lateral de modo que, alternativamente, se radien señales de impulsos y se puedan recibir las señales de eco solamente durante las pausas de emisión, se tiene que adaptar entonces continuamente la frecuencia de repetición de impulsos (PRF: Pulse Repetition Frequency) , es decir, la frecuencia de radiación de señales de impulsos durante una órbita. No obstante, esto aumenta considerablemente la complejidad del control de la exploración. En una zona de acceso a captar con, por ejemplo, un ángulo de incidencia de 20º a 55º el haz de exploración emitido por un sensor de visión lateral hacia la superficie a medir es colocado en una pluralidad de franjas solapadas individualmente seleccionables, cuya posición en el sentido del ángulo de incidencia o del ángulo de visualización se mantiene semejante en toda la órbita. Los valores posibles para la PRF en base al tiempo de propagación de las señales varían a lo largo de la órbita. Frecuentemente, no es posible una PRF fija para cada franja (swath) .
La publicación “The Lincoln Laborator y 35 GHz airborne SAR imaging radar system”, Henr y J C ED – Institute of Electrical and Electronics Engineers Proceedings of the National Telesystems Conference. Atlanta, 26 de marzo 19910326; 19910326 – 19910327 Nueva York, IEEE, US, Vol. -, 26 de marzo de 1991 () , páginas 353358, XP010047053 ISBN: 978-0-7803-0062-0, describe un sistema SAR asistido por avión. En el capítulo 2.4 (y en los subcapítulos) de esta publicación se describe el sistema para la localización de aviones. Con varios instrumentos se miden la posición y la velocidad del avión y se emplea la información de velocidad para la compensación del movimiento de la antena. Se utiliza una obtención de altura con un altímetro barométrico para eliminar errores de posición verticales en un filtro sensor de movimiento.
El documento WO2004/104630A1 revela un sistema SAR en el que se utilizan varios haces de radar para formar la imagen de una superficie a captar y se puede utilizar un dispositivo de procesamiento de datos de dirección de balanceo, cabeceo y guiñada en combinación con el radar. Los datos de dirección se determinan por derivación de la información de la posición de vuelo y por ingreso selectivo de datos de elevación del terreno para poder tener así en cuenta las variaciones en la geometría de visión del radar con una elevación del terreno. Por tanto, el cometido de la presente invención consiste en proponer un procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar.
El problema se resuelve por medio de un procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar con las características de la reivindicación 1. Otras ejecuciones de la invención son objeto de las reivindicaciones subordinadas.
Una idea esencial de la invención consiste ahora en que se ajustan, en función de la altura obtenida de un sensor de visión lateral, los haces de exploración radiados por el sensor de visión lateral para explorar una superficie a captar
mediante una rotación de balanceo de tal manera que se reduzca la variación de la superficie a captar a lo largo de la órbita del sensor de visión lateral. Por tanto, en otras palabras, la presente invención propone la aplicación de una ley de balanceo para orientar una antena de un sensor de visión lateral a fin de fijar una franja a iluminar de una superficie a captar. De este modo, a diferencia de una orientación rígida de la antena, el sensor de visión lateral puede ser hecho funcionar en órbita con PRF constante a lo largo de tramos más largos, es decir que se puede optimizar el funcionamiento especialmente respecto de la complejidad del control de la exploración de la superficie a captar. Asimismo, puede ser suficiente un haz de antena por franja a explorar de la superficie a captar en toda la órbita del sensor de visión lateral.
La invención concierne ahora según una forma de realización a un procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral a altura variable sobre la superficie a captar con los pasos siguientes:
- obtención continua de la altura del sensor de visión lateral sobre la superficie a captar y
- ajuste de los haces de exploración radiados por el sensor de visión lateral para explorar la superficie a captar mediante rotación de balanceo (roll steering law) en función de la altura obtenida del sensor de visión lateral de tal manera que se reduzca una variación de la superficie a captar a lo largo de la órbita del sensor de visión lateral. Esto hace posible una simplificación del control de la exploración de la superficie a captar, ya que, según esta forma de realización de la invención, se puede producir como optimización un funcionamiento con PRF constante a lo largo de tramos más largos de la órbita del sensor de visión lateral.
El ajuste por rotación de balanceo puede comprender según una forma de realización de la invención un giro mecánico del sensor de visión lateral.
Como alternativa o bien adicionalmente, en una forma de realización de la invención el ajuste por rotación de balanceo puede comprender una rotación de balanceo electrónica de los haces de exploración radiados mediante una activación correspondiente de una antena del sensor de visión lateral.
Según una forma de realización de la invención, el ajuste por rotación de balanceo puede comprender una basculación de la dirección captada por el sensor de visión lateral en función de la superficie a captar.
Según otra forma de realización de la invención, el ajuste por rotación de balanceo puede comprender el mantenimiento de una distancia fija entre el sensor de visión lateral y la superficie captada.
Asimismo, según una forma de realización de... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para optimizar el funcionamiento de un sensor activo de visión lateral (10) a altura variable sobre la superficie (12) a captar, que comprende los pasos siguientes:
- obtención continua de la altura del sensor de visión lateral sobre la superficie a captar (S10) y
- ajuste de los haces de exploración radiados por el sensor de visión lateral para explorar la superficie a captar mediante rotación de balanceo en función de la altura obtenida del sensor de visión lateral de tal manera que se reduzca una variación – dependiente de la distancia del sensor de visión lateral a la superficie – de una franja iluminada (14; 141, 142) de la superficie a captar a lo largo de la órbita del sensor de visión lateral (S12) .
2. Procedimiento según la reivindicación 1, caracterizado por que el ajuste mediante rotación de balanceo comprende un giro mecánico del sensor de visión lateral.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por que el ajuste mediante rotación de balanceo comprende una rotación de balanceo electrónica de los haces de exploración radiados mediante una activación correspondiente de una antena del sensor de visión lateral.
4. Procedimiento según la reivindicación 1, 2 ó 3, caracterizado por que el ajuste mediante rotación de balanceo comprende una basculación de la dirección captada por el sensor de visión lateral en función de la superficie a captar.
5. Procedimiento según la reivindicación 1, 2, 3 ó 4, caracterizado por que el ajuste mediante rotación de balanceo comprende el mantenimiento de una distancia fija entre el sensor de visión lateral y la superficie captada.
6. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que el ajuste mediante rotación de balanceo comprende el mantenimiento de una anchura fija de una franja iluminada por el sensor de visión lateral en la superficie a captar.
7. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que el ajuste mediante rotación de balanceo comprende una variación – común para todas las franjas iluminadas por el sensor de visión lateral en la zona de acceso – de un ángulo de visualización a lo largo de la órbita del sensor de visión lateral.
8. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que se adapta también la orientación del sensor de visión lateral correspondiente a su posición orbital mediante guiñada y cabeceo de tal manera que se garantice una geometría de toma de Doppler nulo en toda la zona de acceso del sensor de visión lateral.
9. Dispositivo (16) para optimizar el funcionamiento de un sensor activo de visión lateral (10) a altura variable sobre la superficie (12) a captar, en donde el dispositivo está concebido para ejecutar un procedimiento según cualquiera de las reivindicaciones anteriores y presenta lo siguiente:
- unos primeros medios (18) para obtener continuamente la altura del sensor de visión lateral sobre la superficie a captar y
- unos segundos medios (20) para ajustar los haces de exploración radiados por el sensor de visión lateral para explorar la superficie a captar mediante rotación de balanceo en función de la altura obtenida del sensor de visión lateral de tal manera que se reduzca una variación – dependiente de la distancia del sensor de visión lateral a la superficie – de una franja iluminada (14; 141, 142) de la superficie a captar a lo largo de la órbita del sensor de visión lateral.
10. Sensor de visión lateral caracterizado por que presenta un dispositivo según la reivindicación 9.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
 Dispositivo de aerofrenado de satélite, del 30 de Octubre de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Dispositivo de aerofrenado de satélite que comprende un velamen desplegable, caracterizado por que el velamen, una vez desplegado, es una estructura tridimensional […]
Dispositivo de aerofrenado de satélite, del 30 de Octubre de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES (C.N.E.S.): Dispositivo de aerofrenado de satélite que comprende un velamen desplegable, caracterizado por que el velamen, una vez desplegado, es una estructura tridimensional […]
Procedimiento de estabilización térmica de un satélite de comunicación, del 30 de Octubre de 2019, de Worldvu Satellites Limited: Un procedimiento para cambiar el balance térmico de un satélite de comunicación en órbita alrededor de la Tierra , donde el satélite tiene una pluralidad […]
Dispositivo para desplazar o retirar satélites artificiales, del 23 de Octubre de 2019, de D-Orbit SpA: Dispositivo para acoplarse a un satélite espacial (20', 20") antes del lanzamiento para retirar dicho satélite del espacio o desplazar […]
Procedimiento de evitación de una zona prohibida por un satélite, del 23 de Octubre de 2019, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de cálculo de maniobras de actitud de un satélite que comprende por lo menos un instrumento que apunta según un eje de puntería, […]
 Diseño eficiente de mantenimiento de estaciones para sistemas de combustible mixto en respuesta a la falla de un propulsor eléctrico, del 31 de Julio de 2019, de THE BOEING COMPANY: Un aparato que comprende:
un satélite ; y un controlador de órbita configurado para controlar las maniobras de mantenimiento de la estación del satélite , […]
Diseño eficiente de mantenimiento de estaciones para sistemas de combustible mixto en respuesta a la falla de un propulsor eléctrico, del 31 de Julio de 2019, de THE BOEING COMPANY: Un aparato que comprende:
un satélite ; y un controlador de órbita configurado para controlar las maniobras de mantenimiento de la estación del satélite , […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]
Interceptación de desechos espaciales, del 17 de Abril de 2019, de Airbus Defence and Space Limited: Un vehículo para interceptar un objeto diana que está orbitando en el espacio, que comprende: una parte de lanzamiento para conducir el vehículo a […]