Procedimiento y dispositivo para la determinación automática de la posición de transceptores de señales de navegación.
Procedimiento para la determinación automática de la posición de transceptores de señales de navegación con empleo de un sistema de uso para las señales de navegación con los siguientes pasos:
a) calibración gruesa (10) de las coordenadas de los transceptores;
b) estimación (12) de la trayectoria del sistema de uso; y
c) calibración fina (14) de las coordenadas de los transceptores y de la trayectoria del sistema de uso sobre la base de la calibración gruesa y de la estimación de la trayectoria,
caracterizado porque para la calibración fina se emplean ecuaciones de observación doblemente diferenciadas.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08016410.
Solicitante: ASTRIUM GMBH.
Nacionalidad solicitante: Alemania.
Dirección: 81663 München ALEMANIA.
Inventor/es: Martin,Sven Dr, Schlötzer,Susanne, Voith von Voithenberg,Michael.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/11 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › siendo los elementos cooperantes seudolitos o repetidores de señales de sistemas de posicionamiento por satélite.
- G01S19/23 G01S 19/00 […] › Ensayo, monitorización, corrección o calibrado de un elemento receptor.
- G01S19/51 G01S 19/00 […] › Posicionamiento relativo.
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
PDF original: ES-2383466_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para la determinación automática de la posición de transceptores de señales de navegación.
La invención se refiere a un procedimiento para la determinación automática de la posición de transceptores de señales de navegación conforme a la reivindicación 1 y a un dispositivo correspondiente conforme a la reivindicación 22.
Los sistemas de satélite para la navegación mundial (GNSS, del inglés "Global Navigation Satellite System", sistema global de navegación por satélite) son empleados para la determinación de posición y la navegación en la tierra y en el aire. Los sistemas GNSS, tales como por ejemplo el sistema de navegación por satélite europeo que se encuentra en desarrollo (en lo que sigue denominado también sistema Galileo o abreviadamente Galileo) tienen un sistema que comprende una pluralidad de satélites o pseudolitos, un sistema de disposición de recepción fijo a la tierra y unido a una estación central de cálculo así como sistemas de uso, que evalúan y usan las señales de navegación emitidas por los satélites o pseudolitos.
En general, en un entorno de navegación, en particular en un sistema GNSS, debe ser conocida la posición exacta en un sistema de coordenadas de los emisores, que emiten las señales de navegación para la recepción por sistemas de uso. En un sistema de navegación por satélite, el conocimiento de los parámetros orbitales de Kepler de los satélites es de esencial importancia para una navegación exacta. Habitualmente, las posiciones exactas de sistemas GNSS terrestres, es decir sistemas de pseudolitos, son determinadas por una costosa medición de posición de los emisores de las señales de navegación. Hay ya primeros planteamientos para determinar mediante una autocalibración las posiciones de los emisores de navegación.
Las siguientes publicaciones describen la autocalibración de emisores de señales de navegación:
"Self-Calibration of Pseudolite Arrays Using Self-Differencing Transceivers", E. A. LeMaster, S.M. Rock, Proceedings of the Institute of Navigation GPS-99 Conference, Nashville, TN, Sept. 1999, págs. 1549-1558;
"Field Test Results for a Self-Calibrating Pseudolite Array", E. A. LeMaster, S.M. Rock, Proceedings of the Institute of Navigation GPS-2000 Conference, Salt Lake City, Sept. 2000, págs. 1046-1055;
"An Improved Solution Algorithm for Self-Calibrating Pseudolite Arrays", E. A. LeMaster, S.M. Rock, Institute for Navigation National Technical Meeting, San Diego, CA. Enero 2002;
"Field Demonstration of a Mars Navigation System Utilizing GPS Pseudolite Transceivers", E. A. LeMaster, S.M. Rock, Position, Location, and Navigation Symposium, Palm Springs, CA, Abril 2002; y "3-D Capabilities for GPS Transceiver Arrays", M. Matsuoka, E. A. LeMaster, S.M. Rock, Proceedings of the Institute of Navigation GPS-2002 Conference, Portland, OR, Sept. 2002, págs. 824-834
"Mars Navigation System Utilizes GPS", LEMASTER E A ET AL, IEEE AEROSPACE AND ELECTRONIC
SYSTEMS MAGAZINE, IEEE SERVICE CENTER, PISCATAWAY, NJ, US, Vol. 18, nº 4, 1 de abril de 2003, (2003-04-01) , páginas 3-8.
Una desventaja de los procedimientos y sistemas descritos en estas publicaciones consiste sobre todo en que un sistema de uso debe estar realizado como transceptor y con ello también debe poder emitir, lo que sin embargo no se desea siempre, en particular en aplicaciones militares. Si se encuentran muchos usuarios en el sistema de navegación, es ventajoso, teniendo en cuenta una anchura de banda limitada, que los usuarios individuales no puedan enviar señales de navegación. Otra desventaja en la realización como transceptor del sistema de uso consiste en que es necesario hardware complejo, pesado y de costes muy altos para el sistema de uso.
Constituye por ello la tarea de la presente invención crear un procedimiento y un dispositivo para la determinación automática de la posición de transceptores de señales de navegación, en los cuales un sistema de uso no debe estar realizado como transceptor para la autocalibración.
Esta tarea es resuelta mediante un procedimiento para la determinación automática de la posición de transceptores de señales de navegación con las características de la reivindicación 1 y un dispositivo correspondiente con las características de la reivindicación 22. Otras estructuraciones de la invención son objeto de las reivindicaciones subordinadas.
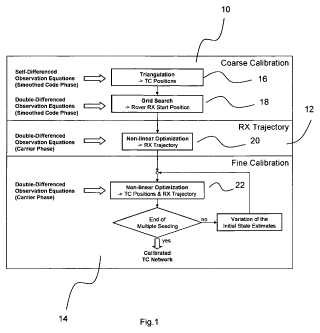
Una idea esencial de la invención consiste en emplear un algoritmo de autocalibración de varias etapas para transceptores de señales de navegación con empleo de un sistema de uso para la determinación de posición de los transceptores. En lo esencial, según un algoritmo así la autocalibración de una red de transceptores se produce en tres pasos:
1. calibración gruesa de las coordenadas de los transceptores;
2. estimación de la trayectoria del sistema de uso; y
3. calibración fina de las coordenadas de los transceptores y de la trayectoria del sistema de uso sobre la base de la calibración gruesa y de la estimación de la trayectoria.
Mediante la autocalibración de las coordenadas de los transceptores puede conseguirse un ahorro considerable de tiempo en el establecimiento de un entorno de navegación local, por ejemplo para un campo de aterrizaje temporal o para la navegación en interiores en determinados edificios. Además no es necesario que un sistema de uso esté realizado como emisor de navegación, lo que es de considerable interés para aplicaciones militares para evitar la detección por un adversario. El empleo de sistemas pasivos de uso hace posible, a la vista de anchuras de banda limitadas, que no tenga que ser limitado el número de usuarios en el entorno de navegación. Finalmente, la invención hace posible hardware económico de usuario con poco peso.
La invención se refiere entonces conforme a una forma de realización a un procedimiento para la determinación automática de la posición de transceptores de señales de navegación con empleo de un sistema de uso para las señales de navegación con los siguientes pasos:
a) calibración gruesa de las coordenadas de los transceptores;
b) estimación de la trayectoria del sistema de uso; y c) calibración fina de las coordenadas de los transceptores y de la trayectoria del sistema de uso sobre la base de la calibración gruesa y de la estimación de la trayectoria.
En otra forma de realización de la invención se determina mediante la calibración gruesa la distancia entre dos transceptores.
Para la calibración gruesa, según otra forma de realización de la invención pueden emplearse ecuaciones de observación auto-diferenciadas ("self-differenced") . Esto hace posible la observación directa de la distancia entre dos transceptores.
El procedimiento puede estar realizado además conforme a una forma de realización de la invención de tal modo que una vez que han sido halladas las distancias entre todos los transceptores, las coordenadas de los transceptores pueden ser determinadas de forma gruesa por triangulación de las distancias halladas entre los transceptores. Con ello, los transceptores pueden ser dispuestos en un sistema local de coordenadas.
Para la determinación de las coordenadas de los transceptores, conforme a otra forma de realización de la invención se emplea un sistema local de coordenadas y se selecciona automáticamente la posición más conveniente del sistema de coordenadas con relación a los transceptores. La introducción de un sistema local de coordenadas hace posible la restricción del sistema, ya que dentro de una red de transceptores son posibles sólo posicionamientos relativos entre sí. Mediante la selección automática de la posición más conveniente del sistema de coordenadas puede mejorarse además la cuota de éxito de la autocalibración también para geometrías difíciles y mediciones muy ruidosas.
En otra forma de realización de la invención, tras el paso a) se determina la posición inicial del sistema de uso antes de la realización del paso b) .
Para una primera estimación de la posición inicial del sistema de uso pueden emplearse, según una forma de realización de la invención, pseudodistancias doblemente diferenciadas ("double-differenced") como magnitud observada. A través de ello son compensados los errores de reloj de los transceptores y del sistema de uso, cuando no están sincronizados los emisores para las señales de navegación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación automática de la posición de transceptores de señales de navegación con empleo de un sistema de uso para las señales de navegación con los siguientes pasos:
a) calibración gruesa (10) de las coordenadas de los transceptores;
b) estimación (12) de la trayectoria del sistema de uso; y c) calibración fina (14) de las coordenadas de los transceptores y de la trayectoria del sistema de uso sobre la base de la calibración gruesa y de la estimación de la trayectoria, caracterizado porque para la calibración fina se emplean ecuaciones de observación doblemente diferenciadas.
2. Procedimiento según la reivindicación 1, caracterizado porque en el marco de la calibración gruesa es hallada la distancia entre dos transceptores.
3. Procedimiento según la reivindicación 2, caracterizado porque para la calibración gruesa se emplean ecuaciones de observación auto-diferenciadas.
4. Procedimiento según la reivindicación 2 ó 3, caracterizado porque una vez que han sido halladas las distancias entre todos los transceptores, son determinadas las coordenadas de los transceptores de forma gruesa por triangulación (16) de las distancias halladas entre los transceptores.
5. Procedimiento según la reivindicación 4, caracterizado porque para la determinación de las coordenadas de los transceptores se emplea un sistema local de coordenadas y se busca automáticamente la posición más conveniente del sistema de coordenadas con relación a los transceptores.
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque tras el paso a) es determinada la posición inicial del sistema de uso antes de la realización del paso b) .
7. Procedimiento según la reivindicación 6, caracterizado porque para una primera estimación de la posición inicial del sistema de uso se emplean pseudodistancias doblemente diferenciadas como magnitud de observación.
8. Procedimiento según la reivindicación 6 ó 7, caracterizado porque la determinación de la posición inicial de un sistema de uso se produce mediante una búsqueda en malla (18) basada en una minimización de residuos de medida.
9. Procedimiento según la reivindicación 8, caracterizado porque para cada punto de malla se determina la suma de los residuos cuadráticos de medida y se emplea como magnitud de prueba, para diferenciar entre diversos candidatos de prueba de los puntos de malla para la posición inicial.
10. Procedimiento según la reivindicación 9, caracterizado porque como primera estimación de la posición inicial se escoge aquel punto de malla que ofrece la menor suma de los residuos cuadráticos de medida.
11. Procedimiento según la reivindicación 10, caracterizado porque la búsqueda en malla se lleva a cabo con una malla gruesa, que cubre toda la superficie del entorno de navegación, y a continuación con una malla fina, que se extiende en torno al punto de malla seleccionado.
12. Procedimiento según una de las reivindicaciones 6 hasta 11, caracterizado porque las dimensiones de la zona de prueba para la determinación de la posición inicial del sistema de uso son determinadas por las coordenadas, calibradas de forma gruesa, de los transceptores.
13. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la estimación de la trayectoria del sistema de uso se produce mediante un planteamiento iterativo de mínimos cuadrados (20) aprovechando una pequeña dinámica del sistema de uso en la linealización de ecuaciones de observación.
14. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque para la calibración fina (14) de las coordenadas de los transceptores y de la trayectoria del sistema de uso se emplean exclusivamente medidas de fase poco ruidosas de las señales de navegación emitidas por los transceptores.
15. Dispositivo para la determinación automática de la posición de transceptores de señales de navegación con empleo de un sistema de uso para las señales de navegación, que comprende:
a) primeros medios (10) para la calibración gruesa de las coordenadas de los transceptores;
b) segundos medios (12) para la estimación de la trayectoria del sistema de uso; y c) terceros medios (14) para la calibración fina de las coordenadas de los transceptores y de la trayectoria del sistema de uso sobre la base de la calibración gruesa y de la estimación de la trayectoria, caracterizado porque los terceros medios (14) para la calibración fina emplean ecuaciones de observación doblemente diferenciadas.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]