Plantillas de unión.
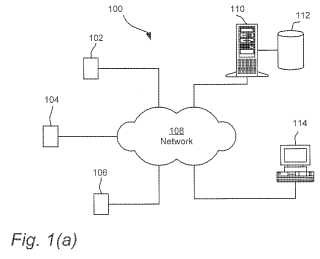
Procedimiento implementado por ordenador para establecer uniones de datos entre los objetos (102,
104, 106,110, 112, 114) en un sistema de automatización de construcción (100), que comprende
- especificar (502) un objeto fuente (302, 306) de dicho objeto, estando dicho objeto fuente asociado con los puntosde unión fuente;
- especificar (504) un objeto de destino (304, 308, 310) de dichos objetos, estando dicho objeto de destino asociadocon puntos de unión de destino;
- proporcionar (506) una plantilla de unión en relación con las uniones de datos entre dichos objetos en dichosistema de automatización de construcción, donde dicha plantilla de unión especifica cómo dichos puntos de uniónfuente son unidos a dichos puntos de unión de destino;
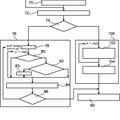
- generar (508), mediante la aplicación de dicha plantilla de unión sobre dicho objeto fuente y dicho objeto dedestino, una lista de puntos de unión que comprende información del punto de unión fuente e información del puntode unión de destino relativas a uniones de datos entre dichos puntos de unión fuente y dichos puntos de unión dedestino, y
- aplicar (510) dicha información del punto de unión fuente mediante dicho objeto fuente y dicha información delpunto de unión de destino mediante de dicho objeto de destino en dicho sistema de automatización de construcción,lo que se establece una unión de datos entre dicho objeto fuente y dicho objeto de destino;
- caracterizado porque dicha plantilla de unión comprende un número de reglas de coincidencia de trayectoria parcialque pertenecen a las trayectorias de identificadores en dicho objeto fuente y en dicho objeto de destino, dondedichas reglas de coincidencia de trayectoria comprenden al menos un operador comodín, al menos un operadorseparador de trayectoria, y al menos un elemento operador de texto sin formato, donde dicho al menos un operadorseparador de trayectoria puede, durante dicha coincidencia de trayectoria, ser excluido de dichas reglas decoincidencia de trayectoria que comprenden dicho al menos un operador comodín, en donde cada una de dichasreglas de coincidencia de trayectoria incluye al menos un identificador común de dicho objeto fuente y de dichoobjeto de destino, y porque dicho procedimiento comprende además
- especificar dicha plantilla de unión mediante la aplicación de dicho número reglas de coincidencia de trayectoriaparcial comparando coincidencias de trayectoria entre dicho objeto fuente y dicho objeto de destino mediante lacomparación de direcciones para dichos puntos de unión fuente y dichos puntos de unión de destino, en dondedicha trayectoria parcial se asocia con dicha dirección.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09157093.
Solicitante: TAC AB.
Nacionalidad solicitante: Suecia.
Dirección: JÄGERSHILLGATAN 18 213 75 MALMÖ SUECIA.
Inventor/es: ANDERSSON,CAMILLA, GRUNDELIUS,MATTIAS, DAVIDSSON,ANDERS, FIHNN,DANIEL, NOBACH,DIEZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B15/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 15/00 Sistemas controlados por un computador (G05B 13/00, G05B 19/00 tienen prioridad; controladores automáticos con características particulares G05B 11/00; computadores en sí G06). › eléctricos.
- G05B19/042 G05B […] › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › que utilizan procesadores digitales (G05B 19/05 tiene prioridad).
- G06F9/44 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 9/00 Disposiciones para el control por programa, p. ej. unidades de control (control por programa para dispositivos periféricos G06F 13/10). › Disposiciones para ejecutar programas específicos.
PDF original: ES-2428640_T3.pdf
Fragmento de la descripción:
Plantillas de unión
Campo técnico La presente invención se refiere al campo general de la construcción de sistemas de automatización. En particular, la presente invención se refiere a un procedimiento, un aparato y un programa de ordenador para el establecimiento de uniones de datos entre los objetos en sistemas de automatización de la construcción.
Antecedentes Un sistema de automatización de construcción comprende comúnmente una pluralidad de dispositivos de campo. En la industria de la automatización de la construcción estos dispositivos de campo pueden ser controlados mediante la implementación de un sistema de control. El sistema de control comprende por lo general una pluralidad de componentes, además de los dispositivos de campo, tales como los programas de control e interfaces de usuario. Los componentes del sistema de control pueden ser representados por objetos implementados en ordenador. Estos objetos pueden ser conectados operativamente mediante el uso de los llamados puntos de unión. Por otra parte, los objetos se asocian comúnmente con una pluralidad de dichos puntos de unión. No hace falta decir que para que el sistema de control funcione correctamente los objetos deben ser unidos correctamente. Los objetos se pueden unir de forma manual, por ejemplo, arrastrar y soltar los puntos de unión de un navegador de puntos de unión a una lista de puntos de unión en una interfaz de usuario. Los objetos también se pueden unir mediante la edición manual de una lista de puntos de unión que comprende todas las uniones de datos en el sistema. La lista de puntos de unión puede, en general, proporcionar información acerca de los puntos de unión de los objetos, de la unidad de los puntos de unión y de que las uniones de datos que se realizan desde y hacia cada punto de unión.
La patente US 5.978.753 está relacionada con la configuración automática de los sensores y accionadores inteligentes utilizados en los sistemas de medición y control. Se da a conocer un procedimiento para la inicialización de un sistema de medición y de control distribuido que establece enlaces de comunicación sobre la base de parámetros de contexto medidos o adquiridos mediantes los nodos. A medida que el sensor inteligente está conectado a un sistema existente, el procedimiento de configuración automática permite un sistema a modo de instalación automática donde el sensor inteligente está habilitado para establecer automáticamente las uniones de datos a otras entidades del sistema. Sin embargo, la patente US 5.978.753 no divulga cómo proporcionar un sistema de sin unión con menos uniones de datos o cómo modificar las uniones de datos ya establecidas.
El documento WO 01/25860 A1 se refiere en general a los sistemas de procesamiento de datos y, más particularmente, a procedimientos y sistemas para generar, aplicar, y definir los patrones para el desarrollo de software. Los procedimientos y sistemas consistentes con el documento WO 01/25860 A1 proporcionan una herramienta de desarrollo de software mejorada que supera las limitaciones de las herramientas convencionales de desarrollo de software. La herramienta de desarrollo de software WO 01/25860 A1 genera una instancia de patrón para ofrecer una solución preventiva adaptada y documentada a un problema común de diseño de software, aplica un patrón a una porción de código existente para mejorar el diseño de código existente, y define un patrón de usuario a partir del código existente para proporcionar un desarrollador con la capacidad de capturar un patrón probado para su reutilización.
El documento WO 01/82072 A1 se refiere a un procedimiento y sistema para el desarrollo de software, y particularmente a un procedimiento y un sistema para la generación de código fuente en un elemento orientado a objetos para reflejar un enlace añadido a otro elemento orientado a objeto. La herramienta de desarrollo de software del documento WO 01/82072 A1 permite a un desarrollador ver simultáneamente una gráfica y una pantalla de texto de código fuente. Las vistas gráficas y textuales son sincronizadas de manera que una modificación en una sola vista se refleja automáticamente en la otra vista. Además, la herramienta de desarrollo de software está diseñada para su uso con más de un lenguaje de programación
Sumario de la invención 55 Dado que puede haber un gran número de puntos de objeto a unir, los procesos de unión anteriores pueden ser bastante engorrosos y propensos a errores. La presente invención se propone resolver, o al menos mitigar, los problemas mencionados anteriormente, proporcionando una herramienta de unión para establecer la unión de datos entre los objetos. La herramienta de unión puede ser realizada como una pluralidad de plantillas de unión. En general, los objetivos anteriores se consiguen mediante un procedimiento, un aparato, y un producto de programa de ordenador para el establecimiento de uniones de datos entre objetos en un sistema de automatización de construcción, de acuerdo con las reivindicaciones independientes adjuntas.
De acuerdo con un primer aspecto, los objetos anteriores se consiguen por el procedimiento implementado por
computadora para establecer uniones de datos entre objetos en un sistema de automatización de construcción, que comprende la especificación de un objeto fuente de los objetos, estando el objeto fuente asociado con los puntos de unión fuente; la especificación de un objeto de destino de los objetos, estando el objeto de destino asociado con los puntos de unión de destino, el suministro de una plantilla de unión en relación con las uniones de datos entre los objetos en el sistema de automatización de construcción, donde la plantilla de unión especifica cómo los puntos de unión fuente son unidos a los puntos de unión al destino; la generación, mediante la aplicación de la plantilla de unión para el objeto fuente y el objeto de destino, una lista de puntos de unión que comprende información del punto de unión fuente y la información del punto de unión de destino relativas a uniones de datos entre los puntos de unión fuente y los puntos de unión de destino, y la aplicación de la información del punto de unión fuente por parte del objeto fuente y la información del punto de unión de destino mediante el objeto de destino en el sistema de automatización de construcción, estableciendo una unión de los datos entre el objeto fuente y el objeto de destino.
El procedimiento descrito permite por lo tanto una herramienta eficaz para establecer la unión de datos entre los objetos, proporcionando plantillas de unión. Las plantillas de unión proporcionan esquemas reutilizables para unir objetos. Las plantillas de unión permiten que el tiempo necesario para configurar el sistema de automatización de construcción se reduzca. Las plantillas de unión pueden reducir los errores relativos a los objetos unidos manualmente.
El procedimiento puede comprender, además, denominar la plantilla de unión como una primera plantilla de unión, y proporcionar una segunda plantilla de unión, en la que al menos uno de los puntos de unión fuente y los puntos de unión de destino de la segunda plantilla de unión es diferente de los puntos de unión fuente y de los puntos de unión de destino asociados con la primera plantilla de unión.
El procedimiento puede por lo tanto permitir más de una plantilla de unión para aplicarse al mismo objeto.
La segunda plantilla de unión puede comprender la primera plantilla de unión y adiciones a la misma. Las adiciones 25 pueden estar relacionadas con las nuevas especificaciones de cómo los puntos de unión de los puntos de unión fuente son unidos a puntos de unión de los puntos de unión de destino.
La segunda plantilla de unión puede por lo tanto proporcionar una información más detallada que la primera plantilla de unión.
El procedimiento puede comprender además la aplicación de forma consecutiva de la primera y segunda plantillas de unión. En el caso de una regla conflictiva de las reglas en la primera y la segunda plantillas de unión, se puede aplicar la regla de la última plantilla de unión aplicada.
Así, la segunda plantilla de unión sólo podrá sobrescribir uniones como se especifica en la segunda plantilla de unión; las restantes uniones tal como son establecidas por la primera plantilla de la unión pueden no verse afectadas por la segunda plantilla de unión.
Cada punto de unión puede estar asociado con una dirección. El procedimiento puede comprender, además, especificar la plantilla de unión mediante la comparación de las direcciones para los puntos de unión fuente y los puntos de unión de destino.
La plantilla de unión puede comprender una serie de reglas... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento implementado por ordenador para establecer uniones de datos entre los objetos (102, 104, 106,
110, 112, 114) en un sistema de automatización de construcción (100) , que comprende 5
- especificar (502) un objeto fuente (302, 306) de dicho objeto, estando dicho objeto fuente asociado con los puntos de unión fuente;
- especificar (504) un objeto de destino (304, 308, 310) de dichos objetos, estando dicho objeto de destino asociado con puntos de unión de destino;
- proporcionar (506) una plantilla de unión en relación con las uniones de datos entre dichos objetos en dicho sistema de automatización de construcción, donde dicha plantilla de unión especifica cómo dichos puntos de unión fuente son unidos a dichos puntos de unión de destino;
- generar (508) , mediante la aplicación de dicha plantilla de unión sobre dicho objeto fuente y dicho objeto de destino, una lista de puntos de unión que comprende información del punto de unión fuente e información del punto de unión de destino relativas a uniones de datos entre dichos puntos de unión fuente y dichos puntos de unión de destino, y
- aplicar (510) dicha información del punto de unión fuente mediante dicho objeto fuente y dicha información del punto de unión de destino mediante de dicho objeto de destino en dicho sistema de automatización de construcción, lo que se establece una unión de datos entre dicho objeto fuente y dicho objeto de destino;
- caracterizado porque dicha plantilla de unión comprende un número de reglas de coincidencia de trayectoria parcial que pertenecen a las trayectorias de identificadores en dicho objeto fuente y en dicho objeto de destino, donde dichas reglas de coincidencia de trayectoria comprenden al menos un operador comodín, al menos un operador separador de trayectoria, y al menos un elemento operador de texto sin formato, donde dicho al menos un operador separador de trayectoria puede, durante dicha coincidencia de trayectoria, ser excluido de dichas reglas de coincidencia de trayectoria que comprenden dicho al menos un operador comodín, en donde cada una de dichas reglas de coincidencia de trayectoria incluye al menos un identificador común de dicho objeto fuente y de dicho objeto de destino, y porque dicho procedimiento comprende además
- especificar dicha plantilla de unión mediante la aplicación de dicho número reglas de coincidencia de trayectoria
parcial comparando coincidencias de trayectoria entre dicho objeto fuente y dicho objeto de destino mediante la comparación de direcciones para dichos puntos de unión fuente y dichos puntos de unión de destino, en donde dicha trayectoria parcial se asocia con dicha dirección.
2. El procedimiento de acuerdo con la reivindicación 1, que comprende además
- denominar dicha plantilla de unión como una primera plantilla de unión, y
- proporcionar una segunda plantilla de unión, donde al menos uno de dichos puntos de unión fuente y dichos puntos
de unión de destino de dicha segunda plantilla de unión es diferente de dichos puntos de unión fuente y dichos 45 puntos de unión de destino asociados con dicha primera plantilla de unión.
3. El procedimiento de acuerdo con la reivindicación 2, en el que dicho segunda plantilla de unión comprende dicha primera plantilla de unión y adiciones a la misma, refiriéndose dichas adiciones a las nuevas especificaciones de cómo los puntos de unión de dichos puntos de unión fuente son unidos a puntos de unión de dichos puntos de unión de destino.
4. El procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 3, que comprende además
- aplicar consecutivamente dichas primera y segunda plantillas de unión; y 55
- donde en el caso de una regla conflictiva de dichas reglas en dicha primera y dicha segunda plantillas de unión aplicando la regla de la última plantilla de unión aplicada.
5. El procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 4, en el que dicho objeto de destino se asocia con una carpeta que comprende una pluralidad de objetos de destino adicionales, comprendiendo dicho procedimiento además
- generar dicha lista de puntos de unión de dichos objetos de destino adicionales en dicha carpeta.
6. El procedimiento de acuerdo con una cualquiera de las reivindicaciones 1 a 5, que comprende además
- asociar a cada objeto en dicho sistema de automatización de construcción con al menos un tipo de objeto;
- referir dicho objeto fuente a uno de dichos al menos un tipo de objeto, denominado tipo de objeto fuente.
5. referir dicho objeto de destino a uno de dichos al menos un tipo de objeto, denominado tipo de objeto de destino, y
- especificar dicha plantilla de unión para unir dicho objeto fuente y dicho objeto de destino mediante la especificación de uniones de datos entre los puntos de unión de dicho tipo de objeto fuente y los puntos de unión de dicho tipo de objeto de destino.
7. El procedimiento de acuerdo con la reivindicación 6, en el que cada objeto está asociado con al menos dos tipos de objetos diferentes.
8. El procedimiento de acuerdo con la reivindicación 6 ó 7, en el que dicha plantilla de unión especifica uniones entre 15 un tipo de objeto fuente y dos tipos de objetos de destino.
Patentes similares o relacionadas:
 Procedimiento de optimización de la energía suministrada a una pluralidad de equipos distribuidos en un espacio, del 29 de Julio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de optimización de la energía total suministrada a una pluralidad de equipos de confort distribuidos en un espacio que consta de un módulo […]
Procedimiento de optimización de la energía suministrada a una pluralidad de equipos distribuidos en un espacio, del 29 de Julio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento de optimización de la energía total suministrada a una pluralidad de equipos de confort distribuidos en un espacio que consta de un módulo […]
Procedimiento para asociar automáticamente un módulo a un inversor correspondiente, y módulo y sistema de generación de energía relacionados, del 1 de Julio de 2020, de MARICI Holdings The Netherlands B.V: Procedimiento para asociar automáticamente un módulo a un inversor (10a) correspondiente de una pluralidad de inversores (10a, 10b, 10c) que están […]
Aparato y método para controlar una señal de entrada, del 1 de Julio de 2020, de LSIS Co., Ltd: Un aparato para controlar una senal de manera que una senal de entrada del PLC (Controlador Logico Programable) se iguale a una senal de entrada de referencia (uc), caracterizado […]
Procedimiento y disposición para el control remoto de dispositivos de campo de al menos un sistema de automatización, del 17 de Junio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento para el control remoto de al menos un dispositivo de campo (D1... Dn) en al menos un sistema de automatización (P1... Pk) con una unidad de control (BG); […]
Dispositivo de campo y método de suministro de información, del 3 de Junio de 2020, de Yokogawa Electric Corporation: Dispositivo de campo , que comprende: una pluralidad de tipos de sensores (30a a 30e); al menos un convertidor (20a a 20e) configurado para adquirir resultados […]
Procedimiento para el control de un accionamiento, del 20 de Mayo de 2020, de Siemens Energy Global GmbH & Co. KG: Procedimiento para el control de un accionamiento con al menos un convertidor , al menos un motor y un control de un accionamiento asociado; en donde está […]
Sistema y método de control en bucle cerrado de firma de objetivo, del 6 de Mayo de 2020, de EMHART GLASS S.A.: Un sistema para ajustar automáticamente la regulación temporal de sucesos de operaciones en cavidades de una sección de una máquina de secciones individuales, […]
Montaje compuesto por un sistema de desbloqueo de emergencia y un sistema de diagnóstico para verificar el funcionamiento del sistema de desbloqueo de emergencia, del 6 de Mayo de 2020, de KLAW PRODUCTS LIMITED: Un montaje para transferir materia entre los primer y segundo objetos separados por una distancia, siendo móviles uno o ambos de los primer y segundo objetos para aumentar […]