Método y sistema de buscar el azimut y el norte verdaderos.
Un método para obtener un encabezamiento de azimut verdadero para corregir un encabezamiento de azimut basto medido desde una posición de observación (402) a un objetivo concreto seleccionado (406) operando un sistema (200) de adquisición de datos dispuesto en la posición de observación,
que comprende:
- un módulo de ordenador (20) que ejecuta cálculos y que presenta al menos un mapa, y que tiene acceso a una fuente de datos de situación verdaderos (21),
- una pantalla de ordenador (30) acoplada al módulo de ordenador (20) destinada a presentar datos de salida en superposición al por lo menos un mapa,
- un dispositivo de observación (25) enfocado al objetivo concreto seleccionado (406) y acoplado al módulo de ordenador (20) para a introducción en el mismo de datos que incluyen datos de situación y datos de objetivo, incluyendo el dispositivo de observación (25) dispositivos destinados a medir datos de objetivo que incluyen ángulo de elevación, ángulo de guiñada horizontal relativo y encabezamiento de azimut basto, y medios adaptados a obtener datos de distancia o alcance,
estando caracterizado el método por comprender los pasos de:
- alimentar datos de entrada en el módulo de ordenador que incluyen datos de situación de posición de observación, datos de objetivo basados en la lectura del azimut basto y límites de errores asociados, y que operan el módulo de ordenador para presentar el al menos un mapa seleccionado de acuerdo con datos de situación de la posición de observación,
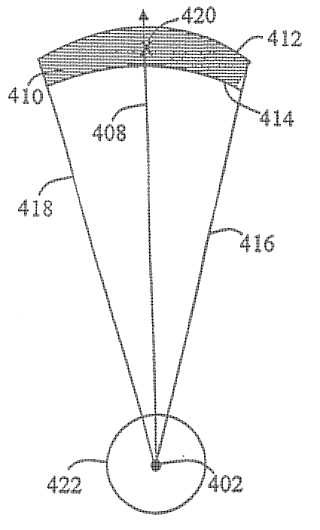
- ejecutar el al menos un cálculo dedicado para proporcionar datos de situación calculada del objetivo para el objetivo concreto seleccionado de acuerdo con datos de entrada, y para calcular una zona de errores delimitada por límites de errores de datos para presentar en el módulo de presentación (30) como una zona de búsqueda, estando dispuesta la situación del objetivo calculada dentro de la zona de búsqueda que contiene el objetivo concreto seleccionado, y
- superponer la zona de búsqueda al por lo menos un mapa presentado,
- realizar una cualquiera o ambas de una exploración automática y una búsqueda conducida por el operador dentro de los límites de la zona de búsqueda mostrados en el módulo de presentación para el objetivo concreto seleccionado, el cual, cuando es encontrado y señalado, opera el módulo de ordenador para:
- recuperar datos de situación verdaderos del objetivo concreto seleccionado a partir de una fuente de datos de situación verdaderos (21), y
- sustituir datos de situación de objetivo previamente calculados por los datos de situación verdaderos del objetivo concreto seleccionado, y
- activar el al menos un cálculo dedicado para calcular y aceptar el encabezamiento del dispositivo de observación dirigido al objetivo concreto seleccionado como el verdadero azimut, para realimentar el verdadero azimut al dispositivo de observación, y para presentar datos del resultado del cálculo,
con lo que el sistema de adquisición de datos proporciona un azimut verdadero del cual se puede obtener la verdadera dirección del Norte y utilizarla como entrada para operación adicional.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IL2007/000044.
Solicitante: MALCHI, TOMER.
Nacionalidad solicitante: Israel.
Dirección: 18 Michal Street 18 Michal Street ISRAEL.
Inventor/es: MALCHI,TOMER, MALCHI,YANIV.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C17/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Brújulas (compases); Dispositivos para determinar el norte real o magnético con fines de navegación o topografía (que utilizan el efecto giroscópico G01C 19/00).
- G01C19/00 G01C […] › Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos.
- G01S19/50 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › donde la solución de posición está restringida a encontrarse en una curva o superficie particular, p. ej. locomotora sobre unos raíles.
- G01S19/51 G01S 19/00 […] › Posicionamiento relativo.
- G06F15/00 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Computadores digitales en general (detalles G06F 1/00 - G06F 13/00 ); Equipo de procesamiento de datos en general.
PDF original: ES-2420528_T3.pdf
Fragmento de la descripción:
Método y sistema de buscar el azimut y el norte verdaderos
Campo técnico
La presente invención se refiere, en general, al campo de la navegación y, más particularmente, a métodos y sistemas para buscar el verdadero azimut, el verdadero norte y datos de situación de posición.
Técnica básica Son bien conocidos per se medios de observación para la adquisición de datos de objetivo. Estos instrumentos ópticos son utilizados, por ejemplo, por geodésicos y artilleros. Tal equipo es comparable a un teodolito o brújula de tránsito, con una plataforma giratoria para dirigir un telescopio hacia un objetivo. Normalmente se incluyen una brújula, un ordenador con una CPU para ejecutar programas de ordenador, una unidad de I/O (entrada/salida) , una memoria y un dispositivo de presentación o simplemente pantalla. Se miden con un nonio los ángulos de inclinación y guiñada desde un lugar de observación a un objetivo. Lo más frecuente es que se incluya también un dispositivo activo de medición de alcance o distancia, tal como un Telémetro de Rayos Láser o LRF (Laser Range Finder) .
Se da por sentado que los dispositivos de observación modernos incluyen todos un dispositivo óptico, por ejemplo un telescopio o binoculares, y tienen que ser activados y nivelados antes del uso. La activación y nivelación de aparatos ópticos son normales y de práctica común en la técnica y por lo tanto no se mencionarán en la descripción que sigue.
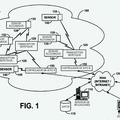
También se conoce en la técnica el acrónimo DTM (modelo digital de terreno) , o DEM (modelo digital de elevación) , que se refiere a un modelo topográfico digitalizado que proporciona una representación de una parte de la superficie del terreno en la forma de un mapa digital tridimensional. Partes que realizan cálculos de superficie o volumétricos con respecto al terreno modelado, posiblemente hacen uso de un tal DTM. Cuando se almacena el DTM en una memoria de ordenador se puede utilizar como una unidad en una base de datos del terreno. El DTM almacenado proporciona entonces los datos básicos para ejecutar cálculos de superficie y volumétricos implementados por un programa de ordenador asociado con un ordenador y una memoria de ordenador. Diversas aplicaciones de ingeniería, militares y ambientales relacionadas se refieren con frecuencia a DTMs para cálculos de superficie o espaciales. Una ilustración gráfica de un DTM se da en la figura 1, a la cual se hace ahora referencia.
La figura 1 muestra una superficie S de DTM derivada de una base de datos de DTM, asociada con un sistema de coordenadas cartesianas (x, y, z) , que tiene un plano de puntos en retícula con coordenadas (x, y) en el plano x-y. Está definida una coordenada de altura (z) para cada par individual de coordenadas (x, y) . Cada punto muestreado en el contorno de la superficie del terreno está representado por una intersección de líneas de X y de Y en la retícula. La altura de cada punto muestreado viene dada por valores a lo largo del eje Z. La resolución de los puntos de muestreo del DTM en el plano X – Y, y la exactitud de la medición de altura de cada punto muestreado, dependen de varios factores, por ejemplo de la calidad de la fotografía aérea a partir de la cual se preparó el mapa.
En la Patente US No. 5.086.396, Waruszewsky Jr. describe “un sistema de navegación aérea” que incluye un sistema de navegación inercial, un mapa del terreno con información de elevación almacenada en un formato digitalizado como función de situación, un altímetro típico de haz estrecho gestionado por energía, de haz estrecho (de radar o láser) , un sistema de presentación y una unidad de tratamiento central para tratar datos de acuerdo con programas previamente seleccionados. “Esto es un ejemplo del uso de un DTM para fines de navegación. Waruszewsky Jr. puntualiza además que “La posición correcta del avión con respecto al mapa digitalizado puede permitir que el avión se implique en procesos de seguimiento del terreno que usen sólo la dificultad para encontrar la altitud con aparatos telemétricos como una fuente de radiación electromagnética emitida”. Por ello, Waruszewsky Jr. se refiere de ese modo a los problemas asociados con la detección de sensores activos.
En la Patente US No. 6.222.464, Tinkel et al. divulgan “Un método de compensación de exploración automatizada en un sistema de adquisición de objetivo para la reducción de zonas de amenaza potencial que rodean a un avión. El sistema de adquisición de objetivo incluye un dispositivo de exploración con límites de exploración ajustables para explorar una zona deseada en la proximidad del avión. “En su invención, Tinkel et al. hacen uso de límites de exploración ajustables para definir una zona explorada.
En la Solicitud de Patente US publicada No. 20020180636 A1, Lin, Chian-Fang, et al. enseñan un método pasivo de determinación de distancia/tratamiento de seguimiento que proporciona información desde sensores pasivos y dispositivos de control de seguimiento asociados y sistema de navegación integrado de GPS/IMU, de manera que se produce información de posición tridimensional y de velocidad de un objetivo. El método pasivo de determinación de distancia/tratamiento de seguimiento incluye el procedimiento de producir dos o más conjuntos de mediciones de dirección de un objetivo con respecto a un portador, tal como conjuntos de ángulos de elevación y de azimut, a partir de dos o más conjuntos sincronizados de sensores pasivos y dispositivos de control de seguimiento asociados, instalados en diferentes lugares del portador, calcular la medición del vector de distancia del objetivo con respecto al portador usando los dos o más conjuntos de mediciones de dirección, y filtrar la medición de vector de distancia para estimar la información de posición tridimensional y de velocidad del objetivo. Se hace uso de sensores pasivos, pero se necesitan dos o más conjuntos sincronizados de sensores pasivos.
La Patente US No. 5.825.480, de Udagawa et al. se refiere al cálculo de una línea de visión que cruza el Mapa Digital del Terreno y describe que “La CPU 31 lee datos relativos a la dirección almacenada en la sección de memoria 33 y, a partir de estos datos y de la información del mapa topográfico, recupera una coordenada de una posición que cruza inicialmente la superficie de la tierra en esta dirección (S5 en la figura 3) . A saber, calcula la posición en la que la línea que se extiende desde la propia posición a la dirección de observación cruza inicialmente la superficie de la tierra”.
La Patente US No. 6.064.942, de Johnson et al. se refiere generalmente a un sistema de observación directa y, más particularmente, a un sistema y un método mejorados de observación directa que usan un receptor de sistema de posicionamiento por satélite integrado con un telémetro de rayos láser y brújula. La posición puede ser utilizada con software de estimación de posición de objetivo para estimación mejorada de la posición del objetivo, reconoce la comisión de errores y detalla errores de medición, errores sistemáticos y errores de operador. Johnson el al. divulgan un telémetro de rayos láser, a saber, un dispositivo buscador activo.
En particular, Johnson detalla el cálculo de errores y enseña que “Aunque la presente invención ha sido descrita con respecto a un estimador de CEP, una realización preferida de acuerdo con la presente invención utiliza un estimador de Probable Error Esférico (SEP) para calcular la estimación de errores en 3-D, ya que la posición del objetivo está ya calculada en tres dimensiones. En el cálculo de SEP, las distribuciones de errores elípticos se sustituyen con elipsoides tridimensionales. Con referencia a la figura 1, las elipses 12 y 22, que representan la exactitud de la distancia y de la de pista de cruce, serían sustituidas por elipsoides con un tercer eje (semi-menor) que se extendiera hasta el plano de la página que representa la exactitud de inclinación y elevación”.
En “Intervisibilidad del terreno – créase o no?”, Stiles trata de intervisibilidad del terreno concerniente a la visibilidad desde un punto de vista del enemigo, de un helicóptero oculto o no por irregularidades del terreno. Stiles usa un enfoque matemático para la determinación de la intervisibilidad, desarrollando un cierto número de funciones de intervisibilidad en tiempo real e intervisibilidad probabilística usando una técnica híbrida o técnicas de multiresolución y algoritmos para obtener los mejores resultados posibles de un conjunto dado de recursos de ordenador. La exposición de Stiles proporciona resultados de cálculos basados en algoritmos y análisis estadísticos.... [Seguir leyendo]
Reivindicaciones:
1. Un método para obtener un encabezamiento de azimut verdadero para corregir un encabezamiento de azimut basto medido desde una posición de observación (402) a un objetivo concreto seleccionado (406) operando un sistema (200) de adquisición de datos dispuesto en la posición de observación, que comprende:
-un módulo de ordenador (20) que ejecuta cálculos y que presenta al menos un mapa, y que tiene acceso a una fuente de datos de situación verdaderos (21) ,
-una pantalla de ordenador (30) acoplada al módulo de ordenador (20) destinada a presentar datos de salida en superposición al por lo menos un mapa,
-un dispositivo de observación (25) enfocado al objetivo concreto seleccionado (406) y acoplado al módulo de ordenador (20) para a introducción en el mismo de datos que incluyen datos de situación y datos de objetivo, incluyendo el dispositivo de observación (25) dispositivos destinados a medir datos de objetivo que incluyen ángulo de elevación, ángulo de guiñada horizontal relativo y encabezamiento de azimut basto, y medios adaptados a obtener datos de distancia o alcance,
estando caracterizado el método por comprender los pasos de:
-alimentar datos de entrada en el módulo de ordenador que incluyen datos de situación de posición de observación, datos de objetivo basados en la lectura del azimut basto y límites de errores asociados, y que operan el módulo de ordenador para presentar el al menos un mapa seleccionado de acuerdo con datos de situación de la posición de observación,
-ejecutar el al menos un cálculo dedicado para proporcionar datos de situación calculada del objetivo para el objetivo concreto seleccionado de acuerdo con datos de entrada, y para calcular una zona de errores delimitada por límites de errores de datos para presentar en el módulo de presentación (30) como una zona de búsqueda, estando dispuesta la situación del objetivo calculada dentro de la zona de búsqueda que contiene el objetivo concreto seleccionado, y
- superponer la zona de búsqueda al por lo menos un mapa presentado,
-realizar una cualquiera o ambas de una exploración automática y una búsqueda conducida por el operador dentro de los límites de la zona de búsqueda mostrados en el módulo de presentación para el objetivo concreto seleccionado, el cual, cuando es encontrado y señalado, opera el módulo de ordenador para:
-recuperar datos de situación verdaderos del objetivo concreto seleccionado a partir de una fuente de datos de situación verdaderos (21) , y
-sustituir datos de situación de objetivo previamente calculados por los datos de situación verdaderos del objetivo concreto seleccionado, y
-activar el al menos un cálculo dedicado para calcular y aceptar el encabezamiento del dispositivo de observación dirigido al objetivo concreto seleccionado como el verdadero azimut, para realimentar el verdadero azimut al dispositivo de observación, y para presentar datos del resultado del cálculo,
con lo que el sistema de adquisición de datos proporciona un azimut verdadero del cual se puede obtener la verdadera dirección del Norte y utilizarla como entrada para operación adicional.
2. El método de acuerdo con la reivindicación 1, en el que:
-la fuente de datos de situación verdaderos (21) para introducir en el módulo de ordenador (20) se selecciona sola y en combinación a partir del grupo que consiste en una fuente externa al dispositivo de observación (25) , interna al dispositivo de observación, externa al sistema (200) de adquisición de datos e interna al sistema de adquisición de datos, y
-el cálculo dedicado es un cálculo de Sistema Pasivo de Adquisición de Objetivo que es alimentado con datos de entrada que incluyen situación de posición de observación, datos de distancia, mediciones de ángulo de azimut y de elevación, y límite de errores de datos asociado.
3. El método de acuerdo con la reivindicación 1, en el que los medios destinados a obtener datos de distancia incluyen el dispositivo de observación (25) , un dispositivo activo de medición de distancia, una fuente pasiva de datos de distancia, un cálculo dedicado, mapas y listados, y en el que los mapas se seleccionan solos y en combinación a partir del grupo de mapas que consiste en mapas digitales del terreno, mapas de
orto-fotos, fotografías aéreas, fotografías del espacio , mapas tácticos, mapas de infrarrojos, mapas de radar y mapas geográficos, siendo más que al menos un mapa superpuesto a la pantalla de ordenador.
4. El método de acuerdo con la reivindicación 1, en el que la zona de búsqueda está delimitada por límites de errores de medición de distancia, por límites de errores de encabezamiento de azimut basto y por límites de errores de posición.
5. El método de acuerdo con la reivindicación 1, en el que:
- el sistema (200) de adquisición de datos apunta a un cuerpo celeste observado,
-el módulo de ordenador (20) ejecuta cálculos que incluyen al menos un cálculo celeste dedicado y al menos un mapa celeste,
-el dispositivo de observación (25) apunta al cuerpo celeste observado y se acopla al módulo de ordenador (20) para introducir en el mismo datos que incluyen datos de situación basta y datos de objetivo, incluyendo el dispositivo de observación:
- acceso a un catálogo estelar como una fuente de datos de situación verdaderos (21) ,
-dispositivos de medición de datos de objetivo para medir el ángulo de elevación y el encabezamiento de azimut basto, y en el que:
-datos adquiridos que incluyen datos de situación de posición de observación basta, ángulo de elevación y encabezamiento de azimut basto y límites de errores asociados de medición son alimentados como datos de entrada en el módulo de ordenador, que es operado para:
-presentar el al menos un mapa celeste calculado por ordenador, seleccionado de acuerdo con los datos de situación de posición de observación, encabezamiento, fecha actual y hora actual en la pantalla (30) ,
-ejecutar el al menos un cálculo celeste para proporcionar datos de situación calculada de una estrella para el cuerpo celeste observado de acuerdo con datos de entrada, y para calcular una zona de errores presentada en la pantalla (30) como una zona de búsqueda delimitada por límites de errores de datos, estando la situación calculada de la estrella dispuesta dentro de la zona de búsqueda que contiene el cuerpo celeste observado, y
- superponer la zona de búsqueda al por lo menos un mapa celeste presentado,
-realizar una cualquiera de una exploración automática y la búsqueda por el operador dentro de los límites de la zona de búsqueda mostrados en el módulo de presentación (30) para el cuerpo celeste verdadero observado, el cual, cuando se encuentra y se señala, opera el módulo de ordenado para:
- recuperar datos de situación verdaderos del cuerpo celeste observado desde una fuente de datos
(21) de situación, tal como un catálogo de estrellas, y
-sustituir datos de situación de la situación previamente calculada de la estrella por los datos de situación verdaderos del cuerpo celeste observado como datos de corrección para introducir en el módulo de ordenador, y
-operar el al menos un cálculo celeste para calcular y aceptar el encabezamiento del dispositivo de observación enfocado al cuerpo celeste observado como el verdadero azimut, realimentando el verdadero azimut al dispositivo de observación, y proporcionar datos del resultado del cálculo,
con lo que el sistema de adquisición de datos proporciona azimut verdadero a partir del cual se puede obtener una verdadera dirección del Norte y utilizada como entrada para operación adicional.
6. El método de acuerdo con la reivindicación 5, en el que la fuente de datos de situación verdaderos (21) para introducir en el módulo de ordenador se selecciona sola y en combinación a partir del grupo que consiste en una fuente externa al dispositivo de observación (25) , interna al dispositivo de observación, externa al sistema (200) de adquisición de datos e interna al sistema de adquisición de datos.
7. El método de acuerdo con la reivindicación 5, en el que el al menos un mapa para presentación es seleccionado solo y en combinación a partir del grupo de mapas que consiste en mapas estelares, mapas de constelaciones y mapas de satélites, y se superponen más del al menos un mapa celeste en la pantalla del ordenador.
8. El método de acuerdo con la reivindicación 5, en el que el cálculo celeste dedicado o un programa de
cálculo del Sistema Pasivo de Adquisición de Objetivo está siendo alimentado con datos de entrada que incluyen datos de situación de la posición de observación, ángulo de elevación, encabezamiento de azimut basto y límites de errores asociados, y la zona de búsqueda está delimitada por límites de errores de encabezamiento de azimut basto, por límites de errores de ángulo de elevación y por límites de errores de posición.
9. El método de acuerdo con la reivindicación 1, para operación del sistema (200) de adquisición de datos con uno cualquiera de un entorno deficiente de GPS y un receptor inoperante de GPS, como un procedimiento para deducir un verdadero azimut y datos de situación de la posición de observación, en el que:
-el operador selecciona al menos un mapa apropiado para presentar en la pantalla de ordenador (30) ,
-el dispositivo de observación (25) se enfoca a un objetivo concreto seleccionado (406) que es uno cualquiera de ambos, elegido y reconocido por el operador, y señalado automáticamente al operador por el módulo de ordenador (20) como una posición seleccionada para la cual están disponibles datos de situación verdaderos,
-el operador está dispuesto para buscar el objetivo concreto seleccionado (406) en la pantalla de ordenador (30) , el cual, cuando es encontrado y señalado, opera el módulo de ordenador (30) para recuperar datos verdaderos (21) de situación medida verdaderos del objetivo concreto seleccionado, junto con límites de errores asociados, para introducir en el módulo de ordenador, y
-el dispositivo de observación (25) es operado para deducir y alimentar el encabezamiento de azimut basto, el ángulo relativo de guiñada horizontal, el ángulo de elevación, la distancia y límites de errores de datos asociados, como datos de entrada al módulo de ordenador,
siendo el módulo de ordenador gobernado para:
- aceptar el objetivo concreto seleccionado que tiene datos de situación conocidos como una posición de observación temporal, y aceptar la posición de observación real que tiene datos de situación desconocidos como un objetivo temporal, añadiendo I radianes ai, o restando I radianes del encabezamiento de azimut basto medido y multiplicando el ángulo de elevación medido por -1,
-ejecutar al menos un cálculo dedicado para calcular y presentar en la pantalla (30) del objetivo temporal rodeado por una zona de errores delimitada por los límites de errores de datos y presentada como una zona de búsqueda, y para proporcionar datos de situación de objetivo temporal, y
-disponer al operador para buscar, dentro de los límites de la zona de búsqueda mostrados en la pantalla desordenador, la verdadera situación del objetivo temporal y, cuando es encontrada y señalada, el sistema de adquisición de datos sustituye los datos de situación del objetivo temporal por los datos de situación de la posición de observación real como entrada en el módulo de ordenador, haciendo posible el cálculo del azimut verdadero y realimentación al dispositivo de observación,
por lo que se obtiene el verdadero azimut a partir del cual se puede deducir una dirección verdadera del
Norte, además de los datos de situación de la posición de observación, todos utilizables como entrada para operación adicional.
10. El método de acuerdo con la reivindicación 9, en el que el procedimiento se puede repetir en secuencias sucesivas, requiriendo cada secuencia un objetivo concreto seleccionado adicional reconocido por uno cualquiera de ambos, el operador, e indicado automáticamente al operador por el modulo de ordenador (20) , datos de situación verdaderos que están disponibles para el operador, con presentación de una zona de búsqueda adicional para superposición a una zona de búsqueda previamente presentada, reduciendo un solape de zona común de zonas de búsqueda el tamaño de la zona que ha de ser investigada por el operador.
11. El método de acuerdo con la reivindicación 9, en el que se selecciona al menos un mapa solo y en combinación a partir del grupo de mapas que consiste en mapas digitales del terreno, mapas de orto-fotos, fotografías aéreas, fotografías del espacio, mapas de infrarrojo, mapas de radar y mapas geográficos, siendo el al menos un mapa para presentación seleccionado como un mapa de orto-fotos y siendo más del al menos un mapa superpuesto en la pantalla del ordenador.
12. El método de acuerdo con la reivindicación 9, en el que el al menos un cálculo dedicado es un programa de ordenador que recibe la posición de observación temporal, el encabezamiento de azimut basto, el ángulo de elevación, la distancia y límites de errores asociados como datos de entrada.
13. El método de acuerdo con la reivindicación 9, en el que la distancia se obtiene por medios que incluyen el dispositivo de observación, un dispositivo activo de medición de distancia, una fuente inactiva de datos de distancia, un cálculo dedicado, mapas y listados, siendo los mapas seleccionados solos y en combinación a partir del grupo de mapas que consiste en mapas digitales del terreno, mapas de orto-fotos, fotografías aéreas, fotografías del espacio, mapas tácticos, mapas de infrarrojos, mapas de radar y mapas geográficos.
14. El método de acuerdo con la reivindicación 1 o la 9, en el que la posición de observación (402) es compatible para utilizar en una plataforma seleccionada como una cualquiera de ambas, estática y móvil, siendo la plataforma seleccionada del grupo que consiste en una plataforma sobre el suelo, en el mar, en el aire y en el espacio.
15. Un aparato para corregir un encabezamiento de azimut basto con una encabezamiento de azimut verdadero, siendo el encabezamiento de azimut basto medido desde un punto de observación (402) a un objetivo concreto seleccionado (406) operando un sistema (200) de adquisición de datos dispuesto en el punto de observación, que comprende:
- un módulo de ordenador (20) que ejecuta cálculos y que presenta al menos un mapa,
-una pantalla de ordenador (30) acoplada al módulo de ordenador, que gobierna la presentación de datos de salida al operador en superposición al por lo menos un mapa,
-un dispositivo de observación (25) enfocado al objetivo concreto seleccionado (406) y acoplado al módulo de ordenador (20) para introducir en el mismo datos verdaderos que incluyen datos de situación y datos de objetivo, incluyendo el dispositivo de observación (25) dispositivos destinados a medir datos de objetivo, medición del ángulo de elevación, ángulo relativo de guiñada horizontal, encabezamiento de azimut basto, y medios destinados a obtener datos de distancia,
estando caracterizado el aparato por comprender:
-datos de entrada que incluyen datos de situación de posición de observación, datos de objetivo basados en el encabezamiento de azimut basto, y límites de errores asociados que son alimentados como entrada al módulo de ordenador que es operado para gobernar el al menos un mapa seleccionado de acuerdo con datos de situación del punto de observación que son presentados en la pantalla;
-siendo realizado al menos un cálculo dedicado para proporcionar datos de situación del objetivo calculados para el objetivo concreto seleccionado de acuerdo con datos de entrada, y para calcular una zona de errores delimitada por límites de errores de datos y presentada como una zona de búsqueda,
-estando dispuesta la situación de objetivo calculada dentro de la zona de búsqueda que contiene el objetivo concreto seleccionado, y estando la zona de búsqueda superpuesta al por lo menos un mapa presentado,
-estando el operador dispuesto para buscar, dentro de los límites de la zona de búsqueda mostrados en el módulo de presentación, la verdadera situación del objetivo concreto seleccionado, la cual, cuando es encontrada y señalada, opera el módulo de ordenador para:
- recuperación de datos de situación del objetivo concreto seleccionado, y
-sustitución de datos de situación de la situación de objetivo previamente calculada por los datos de situación verdaderos del objetivo concreto seleccionado, siendo el cálculo dedicado operado para calcular y aceptar el encabezamiento del dispositivo de observación enfocado al objetivo concreto seleccionado como el verdadero azimut, para realimentar el verdadero azimut al dispositivo de observación, y para presentar datos del resultado del cálculo,
con lo que el sistema de adquisición de datos proporciona el verdadero azimut, del cual se puede obtener la verdadera dirección del Norte y usarse como entrada para operaciones adicionales.
16. El aparato de acuerdo con la reivindicación 15 según es ejecutado de acuerdo con cualquiera de las reivindicaciones de método 2 a 14.
Patentes similares o relacionadas:
Servicios sensibles al contexto, del 24 de Junio de 2020, de Nokia Technologies OY: Un método que comprende: recibir, en un dispositivo inalámbrico , señales de sensor que caracterizan una o más condiciones ambientales, […]
Generación de una separación de tinta blanca, del 19 de Febrero de 2020, de ELECTRONICS FOR IMAGING, INC: Procedimiento de impresión con un dispositivo capaz de imprimir tinta blanca, para crear una imagen, como un color de impresión que comprende: calcular un factor […]
Sistema de descodificación para descodificar archivos multimedia, sistema para codificar un archivo multimedia, y archivo multimedia, del 22 de Enero de 2020, de DIVX, LLC: Un sistema de descodificación para descodificar archivos multimedia (30, 30'), comprendiendo el sistema de descodificación: un procesador configurado y al […]
 Controlador de sitio con funcionalidad de correlación, del 26 de Junio de 2019, de SIPCO LLC: Un controlador de sitio para su uso en una red de comunicación inalámbrica adaptado para su uso en un sistema de supervisión automático […]
Controlador de sitio con funcionalidad de correlación, del 26 de Junio de 2019, de SIPCO LLC: Un controlador de sitio para su uso en una red de comunicación inalámbrica adaptado para su uso en un sistema de supervisión automático […]
Método y programa de autenticación de usuario, y aparato de formación de imágenes, del 15 de Mayo de 2019, de RICOH COMPANY, LTD.: Un método de autenticación de usuario para un aparato de formación de imágenes que se puede conectar a través de una red a un aparato de […]
Método y aparato de autenticación para autenticar documentos de valor, del 6 de Marzo de 2019, de HONEYWELL INTERNATIONAL INC.: Un marcador, que comprende: una red cristalina inorgánica que comprende al menos un primer ion de tierras raras activo y un segundo ion […]
Método y programa de autenticación de usuario, y aparato de formación de imágenes, del 20 de Febrero de 2019, de RICOH COMPANY, LTD.: Un método de autenticación de usuario para un aparato de formación de imágenes que se puede conectar a través de una red a un aparato […]
Sistema y método para la gestión distribuida de ordenadores compartidos, del 20 de Febrero de 2019, de Zhigu Holdings Limited: Método para operar una arquitectura de gestión informática de múltiples niveles, teniendo dicho método los siguientes pasos: operar un ordenador […]