MÉTODO Y SISTEMA DE AJUSTE DE LA ALINEACIÓN DE UN HAZ FOTÓNICO.
Método y sistema de ajuste de la alineación de un haz fotónico.
El método comprende:
- detectar las posiciones (u0, v0; u1, v1) de dicho haz fotónico (L) según dos ejes de coordenadas X, Y, sobre un primer y un segundo planos XY que cortan a un eje óptico Z por unos respectivos primer y segundo puntos;
- comparar los resultados de dichas detecciones posicionales (u0, v0; u1, v1), y:
- si existen discrepancias que están fuera de un margen de precisión (p), realizar un ajuste angular del haz fotónico (L) según el ángulo α y/o el ángulo β con el fin de superar dichas discrepancias; o
- si no existen discrepancias que estén fuera de dicho margen de precisión (p), considerar dicho haz fotónico (L) como debidamente ajustado angularmente.
El sistema está adaptado para implementar el método propuesto por la invención.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131529.
Solicitante: EASY LASER, S.L.
Nacionalidad solicitante: España.
Inventor/es: SANS RAVELLAT,RAMON, IBAÑEZ BARON,JOSE MIGUEL, DE ECHANIZ,Sebastián R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo de aparatos ópticos; Ensayo de aparatos y estructuras por métodos ópticos, no previstos en otro lugar.
Fragmento de la descripción:
Método y sistema de ajuste de la alineación de un haz fotónico Sector de la técnica La presente invención concierne en general, en un primer aspecto, a un método de ajuste de la alineación de un haz fotónico, y más en particular a un método que comprende detectar la posición del haz fotónico en dos planos XY distanciados a lo largo de un eje óptico Z y, si existen discrepancias posicionales entre ambas detecciones, realizar un ajuste angular del haz fotónico.
Un segundo aspecto de la invención concierne a un sistema de ajuste de la alineación de un haz fotónico adaptado para implementar el método del primer aspecto.
Estado de la técnica anterior
En la mayoría de equipos láser de marcaje, corte y soldadura, o en general en cualquier sistema óptico, es necesario proceder a un ajuste del haz de salida del láser o de cualquier fuente fotónica con respecto a un determinado conjunto óptico, electro-óptico u opto-mecánico.
La solución actual es la utilización de procedimientos de ajuste subjetivos, ya sea con dianas de centraje, con papeles térmicos, o en general con cualquier sistema que requiere de la utilización de un operario y éste es el que debe decidir si el sistema óptico está ajustado.
Esto implica en la mayoría de situaciones que los sistemas no estén perfectamente alineados, o que para la optimización del ajuste hace falta normalmente un largo tiempo de aprendizaje y de ejecución del ajuste.
Por regla general los sistemas ópticos que se deben ajustar según una fuente fotónica (un láser) , por razones propias de diseño modifican la trayectoria de dicha fuente desalineándola con respecto a un eje óptico Z. En general, dicha trayectoria está desalineada según los ejes de coordenadas X, Y perpendiculares a dicho eje óptico Z, y con dos ángulos a, º con respecto al eje óptico Z sobre el que se quiere realizar el ajuste.
Explicación de la invención Aparece necesario ofrecer una alternativa al estado de la técnica que cubra las lagunas halladas en el mismo, que proporcione un mecanismo de ajuste más ventajoso que los conocidos y que posibilite, para algunas realizaciones, trabajar de manera independiente al operario.
Con tal fin, la presente invención concierne en un primer aspecto a un método de ajuste de la alineación de un haz fotónico, tal como un haz láser, donde dicho haz fotónico se encuentra inicialmente desalineado con respecto a un eje óptico Z, según al menos uno de dos ejes de coordenadas X, Y, perpendiculares a dicho eje óptico Z, y/o al menos uno de dos ángulos a, º existentes en unos planos XZ e YZ, respectivamente.
A diferencia de los métodos convencionales, el propuesto por la presente invención comprende, de manera característica, realizar las siguientes etapas de manera secuencial:
a) detectar la posición de dicho haz fotónico según dichos dos ejes de coordenadas X, Y, sobre un primer plano XY que corta a dicho eje óptico Z por un primer punto;
b) detectar la posición de dicho haz fotónico según dichos dos ejes de coordenadas X, Y, sobre un segundo plano XY que corta a dicho eje óptico Z por un segundo punto distanciado de dicho primer punto;
c) comparar los resultados de dichas detecciones posicionales, y:
c1) si existen discrepancias entre dichas detecciones posicionales que están fuera de un margen de precisión, realizar un ajuste angular del haz fotónico según el ángulo a y/o el ángulo º con el fin de superar dichas discrepancias; o c2) si no existen discrepancias que estén fuera de dicho margen de precisión, considerar dicho haz fotónico como debidamente ajustado angularmente.
Según un ejemplo de realización, el método comprende repetir dicha secuencia de etapas a) a c) una o más veces hasta llegar a una sub-etapa c2) donde el haz fotónico esté debidamente ajustado angularmente.
Para otro ejemplo de realización, el método comprende realizar más de dos detecciones de la posición del haz fotónico según dichos dos ejes de coordenadas X, Y, sobre unos respectivos planos XY que cortan al eje óptico Z por diferentes puntos distanciados entre sí, y llevar a cabo dicha etapa c) para los resultados obtenidos mediante dichas detecciones.
El método también comprende, según un ejemplo de realización, si las detecciones posicionales de la etapa a) y/o de la etapa b) son indicativas de que el haz fotónico se encuentra desalineado posicionalmente según al menos uno de los ejes de coordenadas X, Y fuera de un margen de precisión, realizar un ajuste posicional del haz fotónico según el eje de coordenadas X y/o el eje de coordenadas Y, con el fin de corregir dicha desalineación posicional.
Dicho ajuste posicional es llevado a cabo, en función del ejemplo de realización, tras dicha sub-etapa c2) , tras dicha etapa a) y antes de dicha etapa b) , o tras dicha etapa b) , y de manera manual o automática.
Para un ejemplo de realización, el método comprende realizar dichas etapas a) a c) de manera automática.
Para otro ejemplo de realización, el método comprende realizar como mínimo parte de dicha etapa c) de manera manual, incluyendo la comparación de los resultados de las detecciones posicionales y/o el ajuste angular de la sub-etapa c1) y/o dicha sub-etapa c2) .
El método comprende, según un ejemplo de realización, realizar dicho ajuste de la alineación de dicho haz fotónico, tanto posicional como angular, mediante un sistema opto-mecánico de ajuste con cuatro grados de libertad (X, Y, a, º) .
Por lo que se refiere a las detecciones de las etapas a) y b) , el método comprende, en función del ejemplo de realización, realizarlas con un mismo sensor móvil, desplazándolo a lo largo del eje óptico Z (de forma manual o servo controlada) entre las posiciones que ocupan dichos primer y segundo planos XY, o realizarlas con dos sensores, cada uno de ellos ubicado en una de dichas posiciones que ocupan dichos primer y segundo planos XY.
Un segundo aspecto de la invención concierne a un sistema de ajuste de la alineación de un haz fotónico, donde dicho haz fotónico se encuentra inicialmente desalineado con respecto a un eje óptico Z que define su trayectoria, según al menos uno de dos ejes de coordenadas X, Y, perpendiculares a dicho eje óptico Z, y/o al menos uno de dos ángulos a, º existentes en unos planos XZ e YZ, respectivamente.
A diferencia de los sistemas de ajuste convencionales, el propuesto por el segundo aspecto de la invención comprende:
-medios de detección para;
- detectar la posición de dicho haz fotónico según dichos dos ejes de coordenadas X, Y, sobre un primer plano XY que corta a dicho eje óptico Z por un primer punto; y
- detectar la posición de dicho haz fotónico según dichos dos ejes de coordenadas X, Y, sobre un segundo plano XY que corta a dicho eje óptico Z por un segundo punto distanciado de dicho primer punto;
- medios de comparación para comparar los resultados de dichas detecciones posicionales;
- medios de ajuste angular para realizar un ajuste angular del haz fotónico según el ángulo a y/o el ángulo º;
- medios de control, en conexión con al menos dichos medios de comparación, y previstos para:
- al menos colaborar en dicho ajuste angular del haz fotónico según el ángulo a y/o el ángulo º, si los medios de comparación determinan que existen discrepancias entre dichas detecciones posicionales que están fuera de un margen de precisión, con el fin de superar dichas discrepancias; y
- determinar que dicho haz fotónico está debidamente ajustado angularmente, si los medios de comparación determinan que no existen discrepancias que estén fuera de dicho margen de precisión.
El método propuesto por el primer aspecto de la invención puede implementarse mediante el sistema propuesto por el segundo aspecto o mediante un sistema más sencillo, para el ejemplo de realización comentado anteriormente para el que al menos parte de las etapas del método se llevan a cabo de manera manual. Tal sistema más sencillo no requiere de los citados medios de comparación, si dicha comparación se lleva a cabo por parte de un operario de manera manual, y/o de los mencionados medios de control, si el ajuste angular y/o la determinación de que el haz fotónico está debidamente ajustado se llevan a cabo manualmente por parte de un operario.
Según un ejemplo de realización, los medios de control están previstos para controlar automáticamente a los medios de ajuste angular para realizar dicho ajuste angular del haz fotónico según el ángulo a y/o el ángulo de manera automática.
Según otro ejemplo de realización, los medios de control están previstos...
Reivindicaciones:
1. Método de ajuste de la alineación de un haz fotónico, donde dicho haz fotónico (L) se encuentra inicialmente desalineado con respecto a un eje óptico Z, según al menos uno de dos ejes de coordenadas X, Y, perpendiculares a dicho eje óptico Z, y/o al menos uno de dos ángulos a, º existentes en unos planos XZ e YZ, respectivamente, estando el método caracterizado porque comprende realizar las siguientes etapas de manera secuencial:
a) detectar la posición (Uo, Vo) de dicho haz fotónico (L) según dichos dos ejes de coordenadas X, Y, sobre un primer plano XY que corta a dicho eje óptico Z por un primer punto;
b) detectar la posición (U1, V1) de dicho haz fotónico (L) según dichos dos ejes de coordenadas X, Y, sobre un segundo plano XY que corta a dicho eje óptico Z por un segundo punto distanciado de dicho primer punto;
c) comparar los resultados de dichas detecciones posicionales (Uo, Vo; U1, V1) , y:
c1) si existen discrepancias entre dichas detecciones posicionales (Uo, Vo; U1, V1) que están fuera de un margen de precisión (p) , realizar un ajuste angular del haz fotónico (L) según el ángulo a y/o el ángulo º con el fin de superar dichas discrepancias; o c2) si no existen discrepancias que estén fuera de dicho margen de precisión (p) , considerar dicho haz fotónico (L) como debidamente ajustado angularmente.
2. Método según la reivindicación 1, caracterizado porque comprende repetir dicha secuencia de etapas a) a c) una o más veces hasta llegar a una sub-etapa c2) donde el haz fotónico (L) esté debidamente ajustado angularmente.
3. Método según la reivindicación 1 ó 2, caracterizado porque comprende, si las detecciones posicionales de la etapa a) y/o de la etapa b) son indicativas de que el haz fotónico (L) se encuentra desalineado posicionalmente según al menos uno de los ejes de coordenadas X, Y fuera de un margen de precisión (p) , realizar un ajuste posicional del haz fotónico (L) según el eje de coordenadas X y/o el eje de coordenadas Y, con el fin de corregir dicha desalineación posicional.
4. Método según la reivindicación 3, caracterizado porque comprende realizar dicho ajuste posicional del haz fotónico (L) tras dicha sub-etapa c2) .
5. Método según la reivindicación 3, caracterizado porque comprende realizar dicho ajuste posicional del haz fotónico (L) tras dicha etapa a) y antes de dicha etapa b) .
6. Método según la reivindicación 3, caracterizado porque comprende realizar dicho ajuste posicional del haz fotónico (L) tras dicha etapa b) .
7. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende realizar dichas etapas a) a c) de manera automática.
8. Método según una cualquiera de las reivindicaciones 1 a 6, caracterizado porque comprende realizar al menos parte de dicha etapa c) de manera manual.
9. Método según la reivindicación 3, caracterizado porque comprende realizar dicho ajuste posicional del haz fotónico (L) de manera automática.
10. Método según la reivindicación 3, caracterizado porque comprende realizar dicho ajuste posicional del haz fotónico (L) de manera manual.
11. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende realizar dicho ajuste de la alineación de dicho haz fotónico (L) , tanto posicional como angular, mediante un sistema opto-mecánico de ajuste con cuatro grados de libertad.
12. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende realizar dichas detecciones de las etapas a) y b) con un mismo sensor móvil, desplazándolo a lo largo del eje óptico Z entre las posiciones que ocupan dichos primer y segundo planos XY.
13. Método según una cualquiera de las reivindicaciones 1 a 11, caracterizado porque comprende realizar dichas detecciones de las etapas a) y b) con dos sensores, cada uno de ellos ubicado en una de dichas posiciones que ocupan dichos primer y segundo planos XY.
14. Método según una cualquiera de las reivindicaciones anteriores, caracterizado porque dicho haz fotónico (L) es un haz láser.
15. Sistema de ajuste de la alineación de un haz fotónico, donde dicho haz fotónico (L) se encuentra inicialmente desalineado con respecto a un eje óptico Z que define su trayectoria, según al menos uno de dos ejes de coordenadas X, Y, perpendiculares a dicho eje óptico Z, y/o al menos uno de dos ángulos a, º existentes en unos planos XZ e YZ, respectivamente, estando el sistema caracterizado porque comprende:
-medios de detección para;
- detectar la posición (Uo, Vo) de dicho haz fotónico (L) según dichos dos ejes de coordenadas X, Y, sobre un primer plano XY que corta a dicho eje óptico Z por un primer punto; y
- detectar la posición (U1, V1) de dicho haz fotónico (L) según dichos dos ejes de coordenadas X, Y, sobre un segundo plano XY que corta a dicho eje óptico Z por un segundo punto distanciado de dicho primer punto;
- medios de comparación para comparar los resultados de dichas detecciones posicionales (Uo, Vo; U1, V1) ;
- medios de ajuste angular para realizar un ajuste angular del haz fotónico (L) según el ángulo a y/o el ángulo º;
- medios de control, en conexión con al menos dichos medios de comparación, y previstos para:
- al menos colaborar en dicho ajuste angular del haz fotónico (L) según el ángulo a y/o el ángulo º, si los medios de comparación determinan que existen discrepancias entre dichas detecciones posicionales (Uo, Vo; U1, V1) que están fuera de un margen de precisión (p) , con el fin de superar dichas discrepancias; y
- determinar que dicho haz fotónico (L) está debidamente ajustado angularmente, si los medios de comparación determinan que no existen discrepancias que estén fuera de dicho margen de precisión (p) .
16. Sistema según la reivindicación 15, caracterizado porque dichos medios de control están previstos para controlar automáticamente a los medios de ajuste angular para realizar dicho ajuste angular del haz fotónico (L) según el ángulo a y/o el ángulo º de manera automática.
17. Sistema según la reivindicación 15, caracterizado porque dichos medios de control están previstos para proporcionar a un operario información relativa a dicho ajuste angular, siendo dichos medios de ajuste angular actuables manualmente por dicho operario en base a dicha información de ajuste angular para realizar dicho ajuste angular del haz fotónico (L) según el ángulo a y/o el ángulo º de manera manual.
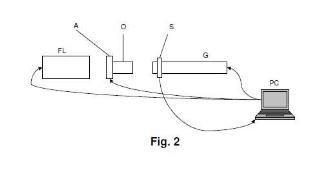
18. Sistema según una cualquiera de las reivindicaciones 15 a 17, caracterizado porque dichos medios de detección comprenden un sensor móvil (S) desplazable a lo largo del eje óptico Z entre las posiciones que ocupan dichos primer y segundo planos XY para realizar las detecciones posicionales en ambos de dichos planos XY.
19. Sistema según una cualquiera de las reivindicaciones 15 a 18, caracterizado porque comprende una unidad de computación (PC) que incluye a dichos medios de comparación y a dichos medios de control, que está conectada y controla a dichos medios de detección para que realicen dichas detecciones posicionales y para recibir información referente al resultado de las mismas, y que implementa al menos las etapas a) , b) y c2) del método según la reivindicación 7 u 8.
20. Sistema según la reivindicación 19, caracterizado porque dicha unidad de computación (PC) también implementa la sub-etapa c1) del método según la reivindicación 7, controlando automáticamente a los medios de ajuste angular.
21. Sistema según una cualquiera de las reivindicaciones 15 a 20, caracterizado porque comprende unos medios de ajuste posicional para realizar un ajuste posicional del haz fotónico (L) según el eje de coordenadas X y/o el eje de coordenadas Y, y porque dichos medios de control se encuentran conectados con dichos medios de detección y están previstos para al menos colaborar en dicho ajuste posicional si las detecciones de los medios de detección son indicativas de que el haz fotónico (L) se encuentra desalineado posicionalmente según al menos uno de los ejes de coordenadas X, Y fuera de un margen de precisión (p) .
22. Sistema según la reivindicación 21 cuando depende de la 19, caracterizado porque dicha unidad de computación (PC) controla a dichos medios de ajuste posicional para realizar automáticamente dicho ajuste posicional del haz fotónico (L) .
Fig.º
A
O S
Fig.º
Fig. º
Patentes similares o relacionadas:
Sistema de vigilancia de la degradación y del ensuciamiento de un espejo, del 13 de Mayo de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Sistema de vigilancia de un espejo , que consta de un cabezal de análisis que comprende un cabezal de emisión adaptado para emitir un […]
DISPOSITIVO, SISTEMA Y PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS, del 30 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en concreto a partir de la calidad […]
Colector de prueba de conector de matriz para instrumentos de prueba ópticos asimétricos, del 4 de Septiembre de 2019, de FLUKE CORPORATION: Un sistema de colector de conectores de matriz para una prueba de red óptica de un enlace óptico multifibra que comprende múltiples rutas ópticas, que comprende: un […]
Dispositivo portátil para la medición sin contacto de objetos, del 20 de Mayo de 2019, de Aeroel S.r.l: Dispositivo portátil para la medición sin contacto de una magnitud, tal como el diámetro, de objetos alargados de pequeño y mediano tamaño, tal como alambres, barras o tubos, […]
Dispositivo y procedimiento para la supresión de reflexión en la medición de una variable de medición por medio de una fibra óptica, del 8 de Mayo de 2019, de BRD, vertr. d. den Bundesminister für Wirtschaft & Energie, dieser vertr. d. den Präsidenten der Bundesanst. f. Materialforsch: Procedimiento para la compensación activa de señales parásitas debido a la reflexión en la reflectometría de dominio de frecuencia óptica, que comprende: - facilitar […]
Sensor de humedad y procedimiento para la medición de humedad., del 1 de Mayo de 2019, de BAM BUNDESANSTALT FUR MATERIALFORSCHUNG UND -PRUFUNG: Procedimiento de medición de humedad para un sensor de fibra óptica 200, que comprende (a) proporcionar datos de medición de retrodispersión […]
 Método de identificación de señal para fibra óptica, del 13 de Marzo de 2019, de AFL Telecommunications LLC: Un método de identificar señales ópticas en una fibra óptica, insertándose la fibra óptica en una ranura de fibra y curvándose alrededor de una parte de curva para […]
Método de identificación de señal para fibra óptica, del 13 de Marzo de 2019, de AFL Telecommunications LLC: Un método de identificar señales ópticas en una fibra óptica, insertándose la fibra óptica en una ranura de fibra y curvándose alrededor de una parte de curva para […]
Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de potencia, del 11 de Marzo de 2019, de OPTOSKAND AB: Aparato para monitorizar el rendimiento del proceso de un sistema de láser con un cable de fibra óptica de alta potencia, específicamente […]