Procedimiento de medición para un sistema sensor.
Procedimiento para la medición de al menos una de las magnitudes
- ángulo de torsión (30),
- modificación de la longitud (31),
- campo magnético (5)
por medio de un sensor (3), en el que en una primera sección de conductores (AB) de una disposición deconductores (AD) conductora de electricidad magnetizable o magnetizada, se genera una magnetización dinámica,en particular helicoidal,
- en el que una magnetización es transportada desde la primera sección de conductores (AB) hasta unasegunda sección de conductores (CD), que presenta una anisotropía (α) en particular helicoidal, de ladisposición de conductores (AD),
- en el que la magnetización transportada es detectada por medio de una tensión (9) generada a través de lasegunda sección de conductores (CD) en virtud del transporte de la magnetización,
- en el que la tensión (9) detectada es una medida de la magnitud del ángulo de torsión (30), de lamodificación de la longitud (31), del campo magnético (5) o una medida mixta de varias de estasmagnitudes,
- en el que al menos una sección de conductores (AB) de la disposición de conductores, en particular toda ladisposición de conductores (AD), está expuesta a un campo magnético (2) modificado en su intensidad decampo magnético,
- en el que la magnetización dinámica, en particular helicoidal, se realiza cuando existen al menos dosintensidades de campo magnético diferentes del campo magnético (2) variable,
- en el que las al menos dos tensiones (9) generadas y detectadas en las diferentes intensidades de campomagnético se utilizan conjuntamente para la formación de la medida de la magnitud del ángulo de torsión(30), de la modificación de la longitud (31) y/o del campo magnético (5).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/002892.
Solicitante: MTS Sensortechnologie GmbH Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Auf dem Schüffel 9 58513 Lüdenscheid ALEMANIA.
Inventor/es: KISKER,ERHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › que utilizan variaciones de las propiedades magnéticas.
- G01D5/14 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
- G01L3/10 G01 […] › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 3/00 Medida del par, del trabajo, de la potencia o del rendimiento mecánico en general. › que implican medios eléctricos o magnéticos de indicación.
- G01R33/028 G01 […] › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 33/00 Dispositivos o aparatos para la medida de valores magnéticos. › Magnetómetros electrodinámicos.
- H01L41/12 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01L DISPOSITIVOS SEMICONDUCTORES; DISPOSITIVOS ELECTRICOS DE ESTADO SOLIDO NO PREVISTOS EN OTRO LUGAR (utilización de dispositivos semiconductores para medida G01; resistencias en general H01C; imanes, inductancias, transformadores H01F; condensadores en general H01G; dispositivos electrolíticos H01G 9/00; pilas, acumuladores H01M; guías de ondas, resonadores o líneas del tipo guía de ondas H01P; conectadores de líneas, colectores de corriente H01R; dispositivos de emisión estimulada H01S; resonadores electromecánicos H03H; altavoces, micrófonos, cabezas de lectura para gramófonos o transductores acústicos electromecánicos análogos H04R; fuentes de luz eléctricas en general H05B; circuitos impresos, circuitos híbridos, envolturas o detalles de construcción de aparatos eléctricos, fabricación de conjuntos de componentes eléctricos H05K; empleo de dispositivos semiconductores en circuitos que tienen una aplicación particular, ver la subclase relativa a la aplicación). › H01L 41/00 Dispositivos piezoeléctricos en general; Dispositivos electroestrictivos en general; Dispositivos magnetoestrictivos en general; Procedimientos o aparatos especialmente adaptados a la fabricación o tratamiento de estos dispositivos, o de sus partes constitutivas; Detalles (dispositivos consistentes en una pluralidad de componentes de estado sólido formados en o sobre un sustrato común H01L 27/00). › Elementos magnetoestrictivos.
PDF original: ES-2430949_T3.pdf
Fragmento de la descripción:
Procedimiento de medición para un sistema sensor
La invención se refiere a un procedimiento para la medición de una de las magnitudes: ángulo de torsión, modificación de la longitud, campo magnético.
Existe gran interés en medir un campo magnético, una torsión y/o una modificación de la longitud. Esto se posibilita con el sensor descrito en el documento WO 2007/051589 A2. Sin embargo, todas las tres magnitudes provocan modificaciones de intensidad similar de la señal del sensor, de manera que las magnitudes que no se pueden medir deberían ajustarse a ser posible fijamente o deberían emplearse sensores de referencia para la determinación de las magnitudes a medir y para la corrección de la señal. Hasta ahora no es posible una determinación común de la tensión de torsión y de la tensión de dilatación o bien sus modificaciones en el caso de utilización de un sensor fijo con respecto a ninguna de las magnitudes mencionadas.
El cometido de la invención es hacer que la medición de una o de varias de las magnitudes campo magnético ambiental, dilatación longitudinal y ángulo de torsión, a las que el sensor es sensible principalmente, sea menos propensa a interferencias, en particular a través de modificaciones de las otras magnitudes.
Este cometido se soluciona con un procedimiento según la reivindicación 1. Las reivindicaciones dependientes contienen formas de realización especialmente favorables del procedimiento de acuerdo con la invención.
Para la medición de al menos una de las magnitudes: ángulo de torsión, modificación de la longitud, campo magnético por medio de un sensor se genera de acuerdo con la invención en una primera sección de conductores de una disposición de conductores de electricidad magnetizables o magnetizados una magnetización dinámica, en particular helicoidal. Esto se realiza, por ejemplo, a través de la aplicación de un campo magnético en la sección de conductores con un vector paralelo a ésta, con preferencia el campo magnético se extiende, en general, lo más paralelo posible a la sección de conductores, y a través de la alimentación de corriente de la sección de conductores con un impulso de corriente. De esta manera, resulta una magnetización, que migra desde la primera sección de conductores hacia una segunda sección de conductores, que presenta una anisotropía especialmente helicoidal. La anisotropía (por ejemplo, un conductor trenzado o un conductor ondulado) posibilita la detección de la magnetización transportada de esta manera por medio de una tensión generada a través de la segunda sección de conductores sobre la base del transporte de la magnetización, que es una medida de la magnitud del ángulo de torsión, de la modificación de la longitud, del campo magnético o una medida mixta de varias de estas magnitudes.
Durante la medición, al menos una sección de conductores de la disposición de conductores, en particular toda la disposición de conductores, se expone a un campo magnético modificado en su intensidad de campo magnético y la magnetización dinámica, en particular helicoidal, se determina en al menos dos intensidades de campo magnético diferentes del campo magnético variable. Las al menos dos tensiones obtenidas de esta manera, generadas o detectadas a las diferentes intensidades de campo magnético, se utilizan en común para la formación de la medida de la magnitud del ángulo de torsión, de la modificación de la longitud y/o del campo magnético.
La invención posibilita medir también la modificación de todas las tres magnitudes casi al mismo tiempo. Ambas cosas se consiguen a través de la utilización de la dependencia característica del campo magnético de la señal del sensor del estado de cada una de las dos magnitudes mecánicas. El procedimiento se explica aquí a modo de ejemplo para el sensor descrito a continuación, pero se puede aplicar en partes esenciales también en otros sensores, que se basan en la elasticidad magnética.
Las ventajas del procedimiento residen, por una parte, en poder utilizar la sensibilidad muy grande del sensor con respecto a modificaciones del campo magnético ambiental, de la tensión de torsión y la tensión de tracción para mediciones precisas, por ejemplo de una de estas magnitudes, evitando o eliminando en gran medida de acuerdo con el procedimiento la sensibilidad para aquellas magnitudes, que no tienen interés en el caso individual. Además, el procedimiento hace posible prescindir de un blindaje magnético, cuando deben medirse una o ambas magnitudes mecánicas. De manera alterativa, se puede reducir el requerimiento del factor de blindaje de un blindaje de campo magnético, lo que reduce sus costes y peso. Además, es posible medir las tres magnitudes mencionadas prácticamente al mismo tempo con un solo sensor. Esto es económico y economizador de espacio.
A continuación se describe en detalle la invención con la ayuda de figuras. En este caso:
La figura 1 muestra la disposición de sensor, que está constituida por el material del sensor (3) representado rayado, los contactos eléctricos A, B, C, D y una boina (4) (figura superior) , colocada alrededor del segmento del sensor que se encuentra entre A y B o una bobina (figura inferior) que rodea todo el sensor para la generación del campo magnético de control Hk. En el caso de mediciones de la torsión, se torsiona al menos el segmento del sensor que se encuentra entre C, D. Se alimentan impulsos de corriente (8) a los contactos A, B, después de lo cual aparecen impulsos de señales bipolares (9) en la proximidad de los flancos del impulso de corriente.
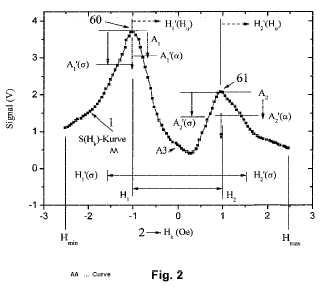
La figura 2 muestra la dependencia-S (Hk) (1) con modificaciones representadas de las posiciones de los picos documentes en el cado de una modificación de un campo magnético exterior en torno a !H, del ángulo de torsión y de la tensión de tracción en torno a !Z. El campo magnético de control se extiende entre Hmin yHmax. La señal del sensor ha sido rectificada. La fase de la señal está opuesta a la derecha y a la izquierda de Hk = 0.
La figura 3 muestra la agrupación del campo magnético H, que actúa sobre el material del sensor, que está constituida por los componentes del campo magnético de control Hk y del campo magnético ambiental Hu.
La figura 4 muestra las dependencias S (Hk) rectificadas para dos tensiones de tracción diferentes así como las primeras derivadas. El sensor tiene una anisotropía transversal correspondiente H1 o bien H2 y una constante de magnetoestricción negativa.
La figura 5 muestra la modificación de la separación de los picos (H’1 –H’2) - (H1 –H2) en el caso de dilatación longitudinal de una banda de sensor 30x1.2x0.02mm con anisotropía magnética transversal y constantes de magnetoestricción negativa.
La figura 6 muestra las dependencias S (Hk) rectificadas para diferentes ángulos de torsión, en la que el ángulo se modifica desde positivo (curva 40) hacia negativo (curva 42) .
La figura 7 muestra la curva de tiempo de los impulsos en los contactos C, D (9) como respuesta al impulso de corriente (8) . El ángulo de torsión ha sido modificado.
La figura 8 muestra las dependencias S (Hk) a partir de la integración sobre los primeros 30 ns después del flanco empinado del impulso de corriente de la señal de sensor resuelta en el tiempo. Los parámetros de las curvas comprenden, por ejemplo, una modificación de la torsión que, como se muestra en la figura 9, conducen en la parte del impulso que aparece posteriormente a un cambio de signo de la curva, así como modificaciones de la tensión de tracción.
La figura 9 muestra las dependencias S (Hk) a partir de la integración de la señal del sensor resuelta en el tiempo, que aparece 100ns después de uno de los flancos empinados del impulso de corriente. Las curvas (20) y (21) se diferencian por el signo del ángulo de torsión y resultan siempre durante su modificación por separado. Con un ángulo de torsión 0, la curva es prácticamente cero (salvo un fondo pequeño, condicionado en parte electrónicamente) .
La figura 10 muestra dependencias del tiempo del impulso del sensor (12) (13) , que aparece en los contactos C, D como respuesta a los impulsos de corriente (10) y (11) alimentados en A, B, que tienen un tiempo de gradiente diferente. (14) identifica un pico dominantes, que se obtiene en el caso de un tiempo de gradiente más largo del impulso de excitación.
La figura 11 muestra la dependencia de la señal de sensor resuelta en el tiempo en el caso de un flanco plano del impulso de corriente (11) en la figura 10 para campo magnético de control fijo y modificación del ángulo de torsión ( (14) , (15) ) así como elevación de la tensión... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la medición de al menos una de las magnitudes
-ángulo de torsión (30) ,
-modificación de la longitud (31) ,
- campo magnético (5)
por medio de un sensor (3) , en el que en una primera sección de conductores (AB) de una disposición de conductores (AD) conductora de electricidad magnetizable o magnetizada, se genera una magnetización dinámica, en particular helicoidal,
-en el que una magnetización es transportada desde la primera sección de conductores (AB) hasta una 10 segunda sección de conductores (CD) , que presenta una anisotropía (#) en particular helicoidal, de la disposición de conductores (AD) ,
-en el que la magnetización transportada es detectada por medio de una tensión (9) generada a través de la segunda sección de conductores (CD) en virtud del transporte de la magnetización,
-en el que la tensión (9) detectada es una medida de la magnitud del ángulo de torsión (30) , de la 15 modificación de la longitud (31) , del campo magnético (5) o una medida mixta de varias de estas magnitudes,
-en el que al menos una sección de conductores (AB) de la disposición de conductores, en particular toda la disposición de conductores (AD) , está expuesta a un campo magnético (2) modificado en su intensidad de campo magnético,
- en el que la magnetización dinámica, en particular helicoidal, se realiza cuando existen al menos dos intensidades de campo magnético diferentes del campo magnético (2) variable,
-en el que las al menos dos tensiones (9) generadas y detectadas en las diferentes intensidades de campo magnético se utilizan conjuntamente para la formación de la medida de la magnitud del ángulo de torsión (30) , de la modificación de la longitud (31) y/o del campo magnético (5) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque las al menos dos intensidades diferentes del campo magnético (2) variable son generadas con las magnetizaciones dinámicas, en particular helicoidales, correspondientes dentro de un periodo de tiempo predeterminado.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, caracterizado porque para la formación de la medida de la magnitud del ángulo de torsión (30) , de la modificación de la longitud (31) y/o del campo magnético (5) se utiliza un 30 desarrollo de la curva (1) de una pluralidad de tensiones detectadas en función del campo magnético (2) modificado.
4. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la magnetización dinámica, en particular helicoidal, es generada en la primera sección de conductores a través de la superposición de dos campos magnéticos.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el campo magnético variable (2) es generado longitudinalmente al menos con respecto a la sección de conductores de la disposición de conductores.
6. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque las al menos dos intensidades diferentes del campo magnético (2) variable son generadas entre dos valores límites (Hmin yHmax) predeterminados, que tienen especialmente signos diferentes.
7. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la magnetización dinámica, en particular helicoidal, es generada a través de un impulso de tensión aplicado en la primera sección de conductores.
Señal (V)
Patentes similares o relacionadas:
Receptor de componentes y receptor de componentes múltiples utilizando dicho receptor de componentes y uso de dicho receptor de componentes múltiples, del 6 de Mayo de 2020, de KISTLER HOLDING AG: Receptor de componente para detectar un componente de torque (Mx, My, Mz); con un elemento hecho de material cristalino piezoeléctrico, cuyo elemento […]
Procedimiento y aparato para codificación magnética seccional continua para medición de par en ejes grandes, del 18 de Marzo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para codificación de un eje , de acuerdo con la reivindicación 6, que comprende: (a) suministrar corriente a una primera posición […]
Procedimiento y aparato para codificación magnética seccional de un eje y para medición de ángulo de rotación, velocidad de rotación y par, del 22 de Enero de 2020, de GENERAL ELECTRIC COMPANY: Sistema que comprende un eje codificado magnéticamente y un sistema de detección de campo magnético, caracterizado por el hecho de […]
Sensor de par de torsión, del 11 de Septiembre de 2019, de Grassi, Michael, J: Un sensor de par de torsión que comprende: un husillo que incluye un primer extremo que puede estar conectado operativamente a un primer […]
Un dispositivo de transmisión para vehículos, del 28 de Agosto de 2019, de SIRAL S.R.L: Una transmisión para medios de transporte que comprende: - un árbol de accionamiento adecuado para ser situado en un eje ("X") de una fuerza de accionamiento; […]
Método y dispositivo para determinar deformación de torsión en un tren de accionamiento, del 7 de Agosto de 2019, de VESTAS WIND SYSTEMS A/S: Método para determinar una deformación de torsión en un tren de accionamiento en una turbina eólica que incluye un primer árbol y un segundo […]
Procedimiento y dispositivo para determinar el par ejercido sobre un cuerpo de rotación que puede accionarse de manera giratoria alrededor de un eje de giro, del 19 de Junio de 2019, de Optical Torque Systems GmbH: Procedimiento para determinar el par ejercido sobre un cuerpo de rotación que puede accionarse de manera giratoria alrededor de un eje de giro, con un primer y un segundo […]
Válvula motorizada que incluye un casquillo instrumentado, del 29 de Noviembre de 2018, de ELECTRICITE DE FRANCE: Válvula motorizada , que incluye: - un servomotor provisto de un eje de salida , - un manguito de maniobra , y […]