Máquina y método de mantenimiento de vía ferrea para nivelación, alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance.
Máquina y método de mantenimiento de vía férrea para nivelación,
alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance.
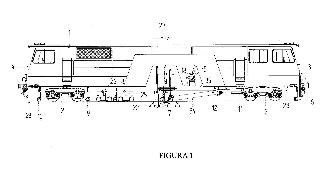
La invención se refiere tanto a una máquina como a un método para nivelar, alinear y estabilizar la vía, y compactar el lecho de balasto, produciendo sobreelevaciones controladas, para que la carga aplicada en el asentamiento de la vía a su posición teórica quede comprendida dentro de un rango establecido, trabajando de forma continua. Para ello, la máquina está constituida por dos bogies con capacidad de tracción (2), y tres cabinas de mando: una delantera (3), una trasera (4) y una central (5). Existen dos carros tensores de medición, el trasero (10) y el delantero (6). La máquina tiene un grupo de sobreelevación, cuyo movimiento relativo con el resto de la máquina está comandado por el cilindro longitudinal total (11). Los cilindros de alineación (18) generan un movimiento transversal para provocar la alineación de la vía. Detrás de este grupo según el sentido de trabajo (27), se sitúa un grupo estabilizador formado por dos carros estabilizadores (25 y 26). En la parte delantera de la máquina se sitúa el georadar (28). A partir de esta estructuración, se consigue un nivelado, alineado, compactado y estabilizado de la vía sumamente efectivo y preciso.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201101252.
Solicitante: IBÁÑEZ LATORRE, José Antonio.
Nacionalidad solicitante: España.
Inventor/es: IBÁÑEZ LATORRE,José Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E01B27/16 CONSTRUCCIONES FIJAS. › E01 CONSTRUCCION DE CARRETERAS, VIAS FERREAS O PUENTES. › E01B VIAS FERREAS; HERRAMIENTAS PARA VIAS FERREAS; MAQUINAS PARA LA CONSTRUCCION DE VIAS FERREAS DE CUALQUIER TIPO (dispositivos descarriladores o para situar los vehículos en la vía, frenos de vía o dispositivos ralentizadores B61K; retirada de materia indeseable de las vías de ferrocarril, control de la vegetación, applicación de líquidos E01H). › E01B 27/00 Colocación, renovación, trabajo, limpieza o retirada del balasto con o sin trabajo correspondiente a la vía; Dispositivos "ad hoc"; Aprisionado de las traviesas. › Máquinas para este uso, p. ej. máquinas para batear las traviesas.
- E01B27/17 E01B 27/00 […] › combinadas con medios para levantar, nivelar o raspar la vía.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN La presente invención se refiere tanto a una máquina como a un método para nivelar, alinear y estabilizar la vía, y compactar el lecho de balasto, produciendo sobreelevaciones controladas, para que la carga aplicada en el asentamiento de la vía a su posición teórica quede comprendida dentro de un rango establecido, trabajando de forma continua.
SECTOR DE LA TÉCNICA La invención se encuadra en el sector técnico del mantenimiento de vías férreas. Más concretamente en lo relativo a los procesos de adquisición, tratamiento e interpretación de datos de la geometría de la vía, y la aplicación de los mismos para su nivelación, alineación y estabilización.
ESTADO DE LA TÉCNICA El paso de los distintos vehículos que circulan por las vías férreas y su exposición a las condiciones meteorológicas, modifican las cualidades de la vía y del resto de elementos sobre los que se asienta. Para corregir la pérdida de estas cualidades y evitar la imposibilidad del uso de la vía, es necesario llevar a cabo una serie de trabajos de mantenimiento. Con la técnica existente en la actualidad, el proceso de alineación y nivelación de vía es realizado por máquinas equipadas con grupos de nivelación y alineación, calzando las traviesas con grupos de bateo. La estabilización se realiza con máquinas equipadas con grupos estabilizadores que aumentan la resistencia transversal de la vía. Las principales patentes que explican los elementos y métodos que son objeto de mejora por esta memoria son las siguientes.
Por la memoria AT-PS 345 881 se conoce una máquina de mantenimiento de vía designada como estabilizador de vías, móvil sobre ruedas continuamente para compactar el lecho de balasto. Esta máquina está equipada con uno o más equipos de estabilización de vías, regulables en altura y dotados de herramientas rodantes que permiten su fijación transversal sin holgura y el desplazamiento longitudinal con respecto a la vía. Mediante dos accionamientos hidráulicos verticales unidos con el bastidor de la máquina, se efectúa la aplicación de una sobrecarga estática regulable sobre el equipo de estabilización que pone a la vía bajo oscilaciones horizontales con la ayuda de vibradores. Con la combinación de la sobrecarga estática y las oscilaciones horizontales se consigue una compactación del lecho de balasto y un descenso de la vía. Para el control del descenso de la vía se prevé un sistema de referencia de nivelación constituido por alambres tensados.
Por la memoria ES 2 030 362 se conoce una máquina para compactar el lecho de balasto, que, en función de, al menos, uno de los siguientes parámetros del grupo estabilizador; sobrecarga vertical, frecuencia de vibración o velocidad longitudinal de la máquina, realiza un descenso controlado de la situación en altura de la vía de la posición existente a la posición teórica. El control de la nivelación consta de una base de referencia de nivelación y un eje de rueda de medición con transmisor de valor medido en altura, caracterizado porque se le ha previsto de un eje de rueda de medición dispuesto detrás del equipo/s de estabilización de vías, según el sentido de desplazamiento de la máquina. Por esta misma memoria se conocen también un perfeccionamiento ventajoso de la invención, por el que se añade uno o más ejes de rueda de medición, adelantados longitudinalmente según el sentido de trabajo. Dicho perfeccionamiento permite una compensación automática de los errores medidos en la altura de la vía, derivados de los apoyos de la máquina en zonas aún sin nivelar.
Por la memoria AT-PS 380 280 se conoce una máquina para obra ferroviaria configurada como una máquina bateadora de vías con un bastidor de herramientas con equipos bateadores, elevadores y alineadores en su parte delantera según el sentido de trabajo, y dotada con equipos estabilizadores en la parte posterior. Ambos equipos están complementados por diversos mecanismos medidores, que permiten controlar los desplazamientos transversales de la vía ejercido por el equipo alineador de la máquina bateadora de vías.
Hasta la actualidad, todos los procesos de mantenimiento en vía que requieren su elevación o la de alguno de sus tramos, son llevados a cabo por máquinas provistas de al menos un grupo de bateo. Existe una gran variedad de estas máquinas o agrupación de máquinas, entre ellas, las citadas en las memorias anteriores. El inconveniente de trabajar con grupos de bateo es que obliga a realizar levantes mayores que la desviación a corregir. Además, para garantizar dicho levante, se requiere un aporte de balasto nuevo sobre la banqueta. Este aporte extra de material aumenta el coste y el tiempo de la operación, que generalmente es llevado a cabo por, al menos, otra máquina capaz de distribuir y perfilar la banqueta de nuevo. La repetición de sucesivos procesos de levante con aporte de balasto en el mismo tramo provoca que la distancia en altura desde el carril a la catenaria, se vaya acortando. Una vez sobrepasado un valor umbral para esta distancia la vía pasa a ser no apta para su uso. Este hecho conlleva la necesidad de, o bien desguarnecer la vía,
o subir la altura de la catenaria.
Otro inconveniente de las máquinas de nivelación y alineación actuales que utilizan grupos de bateo para calzar las traviesas, es que no tienen la posibilidad de medir la calidad de compactación del proceso, y por consiguiente de corregir los errores que se deriven de él. Es posteriormente, durante el proceso de estabilización, cuando se detecta el inconveniente.
Existe también una técnica por la cual se pretende estabilizar la banqueta y la vía sin efectuar esfuerzos sobre ésta última, sino aplicándolos exclusivamente a la zona de balasto entre traviesas. Una máquina capaz de realizar este trabajo se conoce por la memoria ES 2 169279 T3. En ella se expone un ejemplo de ejecución en el que se utiliza un coche automotor que comprende una primera unidad de percusión constituida por partes de herramientas hidráulicas vibradoras que están soportadas por un bastidor en forma del pórtico del coche, y que pueden estar dispuestas de modo que se colocan a ambos lados de cada una de las traviesas y en los extremos de dichas traviesas.
En cuanto al modo y método de utilización de estas máquinas para llevar a cabo estos procesos de mantenimiento, que también es objeto de esta invención, la tecnología existente en la actualidad permite elegir entre dos opciones de corrección de la posición de la vía, según el levante producido. La primera opción incluye una corrección en altura con nivelación por levante al punto alto, en la que el proceso de estabilización está precedido por un proceso de bateo, que deja la vía a una altura de referencia, SIempre mayor que la altura máxima registrada del carril correspondiente. La segunda, opción incluye una corrección de altura con nivelación al punto bajo, y está definida en la memoria ya citada AT-PS 345 881.
Los métodos y máquinas de mantenimiento de vía usados hasta ahora trabajan con límites teóricos o empíricos de la capacidad de cada máquina para modificar el perfil longitudinal de la vía, bien sea en procesos de levante o de descenso, pero no tienen en cuenta ninguna magnitud correspondiente al estado real del lecho de balasto. Estos métodos tampoco incluyen ningún tipo de control que relacione el nivel de compactación del lecho de balasto con la nivelación deseada.
DESCRIPCIÓN DE LA INVENCIÓN La presente invención consiste en una mejora del actual proceso de nivelación, alineación y estabilización de vía y compactación del lecho de balasto, así como una máquina para llevar acabo dicho proceso de una forma eficiente.
En resumen, se ha concebido una máquina capaz de desplazarse a 10 largo de una vía férrea con una serie de grupos de trabajo. El primer grupo de trabajo es el llamado de sobreelevación, capaz de manipular la posición de la vía para llevarla y calzarla en la posición deseada, previa al proceso de estabilización. Más atrasado con respecto al sentido de trabajo de la máquina, se encuentra el grupo estabilizador, formado por dos carros estabilizadores, similares a los existentes en la actualidad, con capacidad de hacer descender la posición de la vía al perfil teórico de una forma controlada, y mejorando su estabilización mediante la aplicación de cargas verticales con una componente vibratoria sobre la vía. La calidad del resultado de este proceso depende de varios factores de la acción en sí, como los
5 valores estáticos y vibratorios de la carga y el tiempo de aplicación, pero también depende de la posición de partida de la vía sobre el perfil teórico y del grado de compactación del lecho del balasto....
Reivindicaciones:
1. Máquina de mantenimiento de vía férrea para nivelación, alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance, caracterizada porque está constituida a partir de los siguientes elementos, según el sentido de trabajo:
-Un georadar orientado para captar el grado de compactación de la zona del lecho de balasto situada debajo de él. -Un grupo de sobreelevación con capacidad de pnsicionar y calzar la vía en la posición requerida, que a su vez se compone de
-Un carro de levante y alineación provisto de rodillos que, mediante una serie de accionamientos, se cierran alrededor de la cabeza del carril, dotado de medios de desplazamiento en la dirección longitudinal de la vía.
-Una serie de accionamientos, que están articulados' en puntos fijos del bastidor de la máquina y el carro de levante y alineación, desplazadores de la vía hasta la posición requerida en dirección vertical y horizontal de su plano transversal. -Un carro compactador provisto de cuerpos en forma de cuña. -Una serie de accionamientos, articulados en puntos fijos del bastidor de la máquina y el carro compactador, desplazadores de los cuerpos en forma de cuña sobre el lecho de balasto y aplicadores de una carga vertical sobre este. -Un accionamiento hidráulico situado en el bastidor del carro compactador, generador de una componente oscilatoria de frecuencia variable en la carga aplicada sobre el lecho de balasto. -Una serie de accionamientos, de movilización relativa longitudinal entre el carro de levante y alineación y el carro compactador. -Una serie de accionamientos de movilización relativa longitudinal entre el grupo de sobreelevación y el bastidor de la máquina.
-Un grupo estabilizador dotado de medios de asentamiento de la vía en la posición requerida. -Un sistema de medición de los parámetros geométricos de la vía, compuesto por cinco carros de medición situados de la siguiente manera; el primero en el frontal de la máquina, delante del georadar. El segundo entre el carro de levante y alineación y el carro compactador. El tercero entre los dos carros del grupo estabilizador. El cuarto detrás del carro estabilizador, por delante del bogie trasero. El último está situado detrás del bogie trasero.
2a._ Máquina de mantenimiento de vía férrea para nivelación, alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance, según reivindicación la, caracterizada porque el grupo estabilizador está formado por dos carros estabilizadores, que a su vez se componen de:
Un bastidor provisto de rodillos, que mediante una serie de accionamientos,
se apoyan sobre la cabeza del carril.
Una serie accionamientos, fijos al bastidor de la máquina y al carro estabilizador, que aplican una carga vertical regulable sobre la vía Un accionamiento hidráulico situado en el bastidor del carro estabilizador,
generador de una componente oscilatoria de frecuencia variable en la carga aplicada sobre la vía.
3a._ Método de mantenimiento de vía férrea para nivelación, alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance, según la máquina de la reivindicación la, caracterizado porque cuando el posicionamiento de la vía se realiza en base a un perfil absoluto, predeterminado por la administración encargada, en el mismo se establecen las siguientes fases operativas:
1. Se provoca el avance continuo de la máquina. 11-Simultáneamente, se registra el grado de compactación del lecho de balasto mediante el georadar.
11. El carro de levante y ripado posiciona la vía en un punto con el levante requerido para alcanzar el perfil absoluto. A este levante se le añade un valor de sobreelevación, que coincide con el asentamiento que provocará el grupo· estabilizador en su posterior paso por este punto. Es directamente proporcional a un factor determinado por el levante requerido y al grado de compactación registrado previamente. IV-El carro compactador ejerce una fuerza vertical oscilante sobre el lecho de balasto entre las traviesas, y el balasto sobrante fluye a la zona bajo traviesas, calzando la vía. V-El carro de medición, situado entre estos dos carros, verifica y controla la posición de la vía en el punto de trabajo. Este paso y el anterior se realizan accionando el cilindro (17) , de tal manera que el carro compactador permanece fijo con respecto a la vía, mientras que el resto de la máquina avanza de forma continua. En caso de que el levante a aplicar sea mayor de 10mm, el cilindro (17) permanece fijo y recogido, se acciona el cilindro (11) , de tal manera que el carro de levante y alineación también permanece fijo con respecto a la vía, mientras que el resto de la máquina avanza de forma continua. (paso 3) . Una vez calzada, se llevan todos los carros a su posición más adelantada para buscar el siguiente punto de trabajo. VI-Simultáneamente los grupos estabilizadores asientan la vía al perfil teórico. En todo momento se registra el valor de la carga vertical que ha sido requerida para llevar la vía a su posición. Previamente se han establecido unos valores umbrales máximo y mínimo para esta fuerza. El umbral mínimo es más restrictivo que el grado mínimo de compactación permisible. El umbral máximo es menor que la capacidad de carga del estabilizador, limitada por las características técnicas de la máquina. VII a-En caso de que la carga aplicada quede por debajo del umbral mínimo, se aumenta el factor de proporcionalidad de la sobreelevación para los puntos situados a partir de la posición del carro de levante y alineación. Vllb-En caso de que la carga aplicada supere el umbral máximo, se disminuye el factor de proporcionalidad de la sobreelevación para los puntos situados a partir de la posición del carro de levante y alineación.
4a._ Método de mantenimiento de vía férrea para nivelación, alineación, compactación y estabilización de vía, con capacidad de operar sin interrupciones en su avance, según la máquina de la reivindicación la, caracterizado porque cuando el posicionamiento de la vía se realiza en base a un perfil teórico, calculado por la máquina, en el mismQ se establecen las siguientes fases operativas:
1. Se realiza una pasada previa a velocidad de hasta 30 km/h por el tramo de vía a tratar. En esta pasada se registra punto a punto: -El grado de compactación de11echo de balasto mediante el georadar. -Las flechas longitudinales y transversales de ambos carriles y su peralte. Estos valores determinan la posición de la vía sin tratar. 11-Se calcula el asentamiento necesario en cada punto de la vía, para que la carga a aplicar por los carros estabilizadores sea igual al valor mínimo establecido por la administración ferroviaria. Este asentamiento es proporcional al grado de compactación registrado previamente. La unión de todos estos puntos genera el perfil del asentamiento óptimo mínimo calculado.
11. Se establece el perfil teórico calculado de la vía, en base al punto más bajo del asentamiento óptimo mínimo calculado. Una vez establecido el perfil teórico, se da comienzo al proceso de mantenimiento como tal; IV-Se provoca el avance continuo de la máquina. V-El carro de levante y ripado posiciona la vía transversalmente, sin provocar levantes. VI-Simultáneamente los grupos estabilizadores asientan la vía al perfil teórico. En todo momento se registra el valor de la carga vertical que ha sido requerida para llevar la vía a su posición. Previamente se han establecido unos valores umbrales máximo y mínimo para esta fuerza. El umbral mínimo es más restrictivo que el grado mínimo de compactación permisible. El umbral máximo es menor que la capacidad de carga del estabilizador, limitada por las características técnicas de la máquina. Vlla-En caso de que la carga aplicada quede por debajo del umbral mínimo, se empiezan a generar valores de sobreelevación para los puntos situados por delante del carro de levante y alineación. En caso de que se ya esté dando, se aumenta su valor. Para ello, el carro de levante y ripado posiciona la vía en el nuevo punto. El carro compactador ejerce una fuerza vertical oscilante sobre el lecho de balasto entre las traviesas, compactando el lecho. El balasto sobrante fluye a la zona bajo traviesas, minetras que el carro de medición, situado entre estos dos carros, verifica y controla la posición de la vía en el punto de trabajo. Este paso se realiza accionando el cilindro (17) , de tal manera que el carro compactador permanece fijo con respecto a la vía, mientras que el resto de la máquina avanza de forma continua.
En caso de que el levante a aplicar ser mayor de 10mm, el cilindro (17) permanece fijo y recogido y se acciona el cilindro (11) , de tal manera que el carro de levante y alineación también permanece fijo con respecto a la vía, mientras que el resto de la máquina avanza de forma continua. Una vez calzada la vía, se llevan todos los carros a su posición más adelantada para buscar el siguiente punto de trabajo. VIIla-Se aumenta progresivamente el valor de la sobreelevación, hasta que la carga del grupo estabilizador vuelve a estar dentro del umbral mínimo de seguridad. IXa-Una vez dentro del umbral, se disminuye progresivamente el valor de la sobreelevación, siempre y cuando la carga de estabilización quede por encima del
umbral mínimo. Se establece así un ciclo de control, que asegura que el levante aplicado a la vía por el grupo de sobreelevación sea el mínimo posible. VIIb-En caso de que la carga aplicada supere el umbral máximo, se disminuye el valor de la sobreelevación calculada. VIIIb-Si se da el caso Vllb, y no se puede reducir el valor de la sobreelevación,
porque el levante aplicado es nulo, la maquina determina un perfil teórico modificado (42) . Se genera desde su predecesor en el punto de trabajo del grupo estabilizador. Se caracteriza por partir con una rampa de entrada suave, con una pendiente menor que el máximo admisible. IXb-Se mantiene la rampa hasta que el valor de la carga de estabilización vuelva a quedar por debajo del umbral máximo. Xb-En este momento se realiza una rampa de salida suave al perfil teórico modificado.
10
FIGURA 1
22 30 16
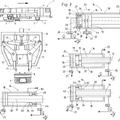
FIGURA 2
~
ua
----~~~~---:::::::::~~------------------.. 0--a-a--. a---.a___ a Q; -------------------__D_O----
-c_u_a.. Il - . a--"D. ....D-D'-""'O__D
.......o___o_o..., -a---.O-"--U-"o_u_o """"'-'
-----.~-~----------. --
-___--___ A __-----
-------------------------------------_._~-----------------
_v-v-v-v-v--v-v-V--V-V--V-V-v-v-V-v. ..._V-V-V-V-V-V~V
V-V-V--V--V-v. -V--Y<
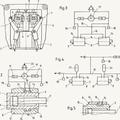
fig.4
~
F~ .. __tt-tt-D
. -O___d-O-¡:¡___ __u.".".., ."..u---o ~
- -----------............ ......
~-~----~---------
- V-V-V-9--V_', / ____V-V--V--V-V-V-V-V-V--v., /......, v-O
"'-v-..... '\ / V
" " // r/'~
----_____~___ ~ ----L
" ' ........ A .... ""'''
------- , -----"C------------------------
'k-......", /
v Vía sin tratar (37)
fig.5 _D_D-D-SobreJevación calculada (38) ·0·_.') ··..·00 ('>-¡'sentamiento óptimo mínimo necesario (39) . ---Asentamiento óptimo mínimo calculado (40) -----Perfil teórico calculado (41)
Perfil teórico modificado (42) -v-v-Asentamiento máximo calculado (43) _, , _x_, , _ Asentamiento máximo obtenible (44)
:;"'---0-----111___ . --o--o___.
_~. a __ ---~. --...
~ --
....... .."...., .. -.... . ----
~ ~~
~ ............, .
D ~ L •• _'___ _._ •••_~~~
.0 '___ •••••••••••_-~_..
_. -_. --. . :~~1:";, , ~~~=-'::--::'.~r -="-=------..::;;:::::---.~"....... ------------------:-. :. -=--=..... ;-. :--;;=.:;.
~ V... v--.... ....." /x :v--"""-x_", __x_x_x-"'
- -x-x ......." """~"-, , -v-:V-:V-:v
........:v--:v--'v... ........"-..., , _x-"'_-""'" V--:v--__V-V~
v-_. ....v.. ... -x-x 9--y-.
~:v
v__
~
Hg. 6
~ ---o ~
- O---Q----a__a __a rg~:tOIOIOTDloTaI:J:~, TD-IIl-o-D-a-li-o-a
__--------------------------------~D~I, o a D-----o 0----0 :' :E ---------------------------
--_:;.. --
__________ . -.... ----------i L__ ... ---. --------"'-. ---o----<c~~~) oi:::; __ __ __ ---i~:;. --<:) -- () .... , , :·>--·o--<'J-. -O.. <>
oo••___
. .L_-=~._~~.~~::::_<~L ............................................
u. ~"i?'Jl_"'---<::::::::=-=:::==t-'I......==-..:::::::::::::~=.".......i!::=
- 9--'V--v_ . B Y) ---"0__::~:'C e __., v_v
"-., . ----"'"-..Y~"
-~~ ~~ ~~
:v-..:v--v-v-V--V-- :v-..v--v-v-v-
Hg. 7
Vía sin tratar (37.
_0__0-0
Sobrclevac:ión calculada (38) .. (_J-...C~"'··0) -Asentamiento óptimo mínimo necesario (39) -----Asentamiento óptimo mínimo calculado (40) ------I'erfil teórico ca1culado (41) Perfil teóri.co modificado (42) -v-v-Asentamiento máximo calculado (43) _, , _, , _x_ Asentamiento máximo obtenible (44)
fé1
Sobrelevadón calculad.l (38J
_0_0_11-11-11_ r-a_0_0~ 11_=_0-0--...........o-....u--o--a-a-a-o-a.........u 0 .....0 ......"., ---0 O~.Q.4f... _all"'''', ....O, .'*, 0--
La~---a......., ___o----*' ¡:
, O-O_O : :: Perfil absolulo (45i - -----------------------t-------~---------------... -~--------r---------------...
i : ______ ¡ Via sin tratar 137) _
"Fv max. (471
.,
,
• Fv max. seguTida~
~~~~J!~
•Fv registrildo (6)
K """-/ L
*Fv mino calidad (50)
Hg. 8
"Fv '" Carga vertical del gtu.po esta.bilizador.
NIVELA:::I ÓN, ALlNEAClióN y ::::::'W FACTACIÓN DE VIA
!/¡I..NTENIV lE NT::: ABSOLUTO
• • t~órco: p~r'¡l a t·soto "'+ =:s.ob1'eeievaciOr C¡¡~c~t;oa:
FIGURA 9
VANT ENI V lENTO RE !....A.Tl\tO
\ VE_ACO'v A_ ""EA;: ', ::l\ y CQ\'::'ACTA;: ó\ :'E VA
::E\E=t:..:: 0\ ~E;;'; ... TEO;;' ::·0
A ASE\TA\' E\TO V" l/O
... "'; 'le"~!flco -~er~~ te~í1"¡~a:~ calc..daco "'!.+ -:SVJree~e\! ilC~"'¡ C3dOJi:;C a =-v· carga \li!r~f:;i¡ ce; gr.';J¡J est.a::H~nc, ) r
FIGURA 10
Patentes similares o relacionadas:
Unidad de bateado y método para batear una vía, del 12 de Febrero de 2020, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad de bateado para batear una vía, con picos de bateado que se pueden sumergir en un lecho de balasto, que son desplazables en vibración […]
Unidad de bateo, así como procedimiento para el bateo de una vía, del 11 de Diciembre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad de bateo con palancas de bateo que pueden moverse por pares en un movimiento de aproximación sobre un eje de giro y que están unidas por un […]
 Disposición de pistón de vibración en cilindro de aproximación de una piqueta de bateado, del 25 de Septiembre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para el bateo por debajo de una vía, con piquetas de bateado que pueden aproximarse entre sí por pares mediante un cilindro de aproximación […]
Disposición de pistón de vibración en cilindro de aproximación de una piqueta de bateado, del 25 de Septiembre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento para el bateo por debajo de una vía, con piquetas de bateado que pueden aproximarse entre sí por pares mediante un cilindro de aproximación […]
Unidad de bateo, del 11 de Septiembre de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad de bateo para el bateado debajo de las traviesas de una vía, con un soporte de piquetas de altura regulable apoyado en un bastidor de unidad , apoyándose en […]
Procedimiento de bateado inferior de una aguja de cambio de vía, del 12 de Junio de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Procedimiento de bateado inferior de una aguja de cambio de vía por introducción de unos útiles bateadores en balasto de una vía férrea, […]
 Unidad bateadora para batear traviesas de una vía, del 30 de Mayo de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad bateadora para batear traviesas de una vía, con un soporte de zapapicos alojado regulable en la altura sobre un bastidor de equipo […]
Unidad bateadora para batear traviesas de una vía, del 30 de Mayo de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Unidad bateadora para batear traviesas de una vía, con un soporte de zapapicos alojado regulable en la altura sobre un bastidor de equipo […]
Máquina de construcción de vía, por ejemplo máquina bateadora, del 27 de Marzo de 2019, de Plasser & Theurer Export von Bahnbaumaschinen Gesellschaft m.b.H: Máquina de construcción de vía, por ejemplo máquina bateadora, para realizar correcciones de la posición de la vía, con un bastidor de máquina que presenta un equipo de […]
Máquina apisonadora para balasto de vía férrea, del 14 de Febrero de 2019, de SRT SOCIETA' A RESPONSABILITA' LIMITATA CON UNICO SOCIO: Máquina apisonadora en particular para regenerar balastos de vía férrea, que comprende: - al menos un armazón de soporte asociable sobre […]