Equilibrador de ligamentos.
Dispositivo quirúrgico ortopédico (10, 10', 10"), que comprende:
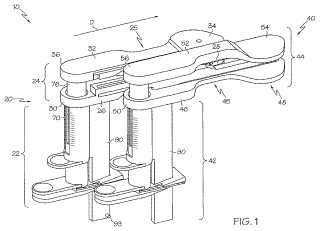
un primer componente sensor (20, 20', 20") que comprende un primer conjunto de paletas (24, 24', 24") quetiene una primera paleta tibial (26, 26', 26") y una primera paleta femoral (32, 32', 32") que se extiendendesde el primer componente sensor (20, 20', 20") en una primera dirección general de extensión (D) paracontactar respectivamente con una tibia proximal (210) y un fémur distal (220) de un paciente, siendodesplazable la primera paleta femoral (32, 32', 32") respecto a la primera paleta tibial (26, 26', 26") paradeterminar un primer desplazamiento entre la tibia proximal (210) y el fémur distal (220);un segundo componente sensor (40, 40', 40") acoplado al primer componente sensor (20, 20', 20"),comprendiendo el segundo componente sensor (40, 40', 40") un segundo conjunto de paletas (44, 44', 44")que tiene una segunda paleta tibial (46, 46', 46") y una segunda paleta femoral (52, 52', 52") que seextienden desde el segundo componente sensor (40, 40', 40") en la primera dirección general de extensión(D) para contactar respectivamente con la tibia proximal (210) y el fémur distal (220) del paciente, siendo lasegunda paleta femoral (52, 52', 52") desplazable respecto a la segunda paleta tibial (46, 46', 46") paradeterminar un segundo desplazamiento entre la tibia proximal (210) y el fémur distal (220); y caracterizadopor
un mecanismo de deslizamiento (120, 120'. 120") dispuesto para acoplar de manera deslizante el primercomponente sensor (20, 20', 20") con el segundo componente sensor (40, 40', 40") para permitir que elprimer componente sensor ( 20, 20', 20") y el segundo componente sensor (40, 40', 40") se deslicen entre síen la primera dirección general de extensión (D), de modo que uno de los conjuntos de paletas (20, 20', 20",44, 44', 44") se extienda más allá del otro conjunto de paletas en la primera dirección general de extensión(D).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09163230.
Solicitante: DEPUY PRODUCTS, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 700 ORTHOPAEDIC DRIVE WARSAW, IN 46581 ESTADOS UNIDOS DE AMERICA.
Inventor/es: CHESSAR,RYAN, DRUMMOND,JAMES, RUHLING,MARC E.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para mantener las heridas abiertas; Separadores.
- A61F2/46 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Herramientas especiales para la implantación de articulaciones artificiales (instrumentos quirúrgicos A61B 17/00).
PDF original: ES-2398614_T3.pdf
Fragmento de la descripción:
Equilibrador de ligamentos La presente invención se refiere en general a dispositivos para uso en procedimientos quirúrgicos ortopédicos, tales como procedimientos de sustitución de rodilla.
En algunos procedimientos quirúrgicos ortopédicos, tales como un procedimiento de reemplazo de rodilla total, se pueden usar dispositivos de equilibrado de ligamentos (comúnmente conocidos como equilibradores de ligamentos) para equilibrar el tejido blando circundante (especialmente los ligamentos) de la articulación de un paciente. Por ejemplo, en un procedimiento de reemplazo de rodilla total, el equilibrado de los ligamentos puede realizarse para garantizar una separación de extensión en forma generalmente rectangular y una separación de flexión en forma generalmente rectangular en un valor de fuerza de articulación predeterminado entre la tibia proximal natural o protésica del paciente y el fémur distal natural o protésico del paciente.
Para ello, puede utilizar un equilibrador de ligamentos para medir las fuerzas de la articulación medial y lateral y los desplazamientos de la separación medial y lateral cuando la pierna del paciente está en extensión (la tibia del paciente se coloca en línea con el fémur) y en flexión (es decir, la tibia del paciente se coloca en aproximadamente 90° en relación con el fémur del paciente) . En extensión o en flexión, si los desplazamientos de la separación medial y lateral no son aproximadamente iguales (es decir, no forman una separación de articulación generalmente rectangular) en el valor de la fuerza predeterminada de la articulación, se puede realizar la liberación ligamento para igualar los desplazamientos de la separación medial y/o lateral.
El documento EP-1645229-A1 divulga un sistema de detección de fuerza de volumen adaptado para detectar el tamaño de un desplazamiento entre un fémur distal y una tibia proximal a una fuerza predeterminada. El sistema de detección de la fuerza de volumen comprende un primer y segundo pares de discos de propagación dispuestos para aplicar una fuerza de distracción entre la tibia y el fémur, estando acoplados juntos el primer y segundo pares de los discos de propagación a través de un mecanismo de articulación para ajustar la separación entre los pares de discos de propagación.
El documento US-2007/0219561-A1 divulga un sistema distractor dispuesto para distraer un fémur y una tibia durante procedimientos quirúrgicos mínimamente invasivos. El sistema de distracción tiene una base plana configurada para asentarse sobre un corte de meseta hecho en el extremo proximal de la tibia. La base está formada a partir de dos placas de base que están conectadas de manera pivotante entre sí mediante una junta de pivote. Cada placa base soporta un elemento de meseta femoral superior para soportar un cóndilo respectivo.
El documento WO-96/17552-A1 divulga un tensiómetro bicompartimental para su uso en cirugía protésica de rodilla y, en particular, para su uso en cirugía de rodilla de revisión. El tensiómetro comprende dos mordazas paralelas, accionables independientemente, que se insertan entre las superficies de resección en el fémur distal y la tibia proximal. Las mordazas se abren manualmente por el cirujano hasta que la tensión adecuada se coloca en los ligamentos colaterales. Cada una de las mordazas comprende dos paletas que permanecen paralelas, y en la misma orientación angular, entre sí a medida que se abren. Además, las dos mordazas permanecen paralelas, o en la misma orientación angular, entre sí cuando se ajustan para su colocación adyacente a los cóndilos.
El documento EP-1245193-A divulga un aparato esparcidor para articulaciones de rodilla. El aparato esparcidor puede ser insertado entre los cóndilos del fémur y la tibia, y puede separarse en una forma conectiva mediante un mecanismo de ajuste. El mecanismo de ajuste tiene un alojamiento que incluye una escala para indicar la separación entre los cóndilos y la tibia y la cantidad de propagación de la fuerza aplicada.
De acuerdo con un primer aspecto de la presente invención, se proporciona un dispositivo ortopédico quirúrgico, que comprende: un primer componente sensor que comprende un primer conjunto de paletas que tiene una primera paleta tibial y una primera paleta femoral que se extienden desde el primer componente sensor en una dirección general de extensión para contactar, respectivamente, con una tibia proximal y un fémur distal de un paciente, siendo la primera paleta femoral desplazable respecto a la primera paleta tibial para determinar un primer desplazamiento entre la tibia proximal y el fémur distal; un segundo componente sensor acoplado al primer componente sensor, comprendiendo el segundo componente sensor un segundo conjunto de paletas que tiene una segunda paleta tibial y una segunda paleta femoral que se extienden desde el segundo componente sensor en la dirección general de extensión para contactar, respectivamente, con la tibia proximal y el fémur distal del paciente, siendo la segunda paleta femoral desplazable respecto a la segunda paleta tibial para determinar un segundo desplazamiento entre la tibia proximal y el fémur distal; y un mecanismo de deslizamiento dispuesto para acoplar de manera deslizante el primer componente sensor con el segundo componente sensor para permitir que el primer componente sensor y el segundo componente sensor se deslicen uno respecto al otro en la dirección general de extensión, de manera que uno del conjunto de paletas se extiende más allá de la otra paleta colocada en la dirección general de extensión.
Preferiblemente, la primera paleta tibial comprende una pista del mecanismo de deslizamiento, y la segunda paleta tibial comprende una corredera acoplada de forma deslizable a la pista para permitir que el segundo componente se deslice en relación con el primer componente a lo largo de la pista de la primera paleta tibial.
Preferiblemente, la pista está acoplada hacia y se extiende más allá de un extremo anterior de la primera paleta tibial que está acoplada al primer componente sensor, y la corredera está acoplada a un extremo anterior de la segunda paleta tibial que está acoplada al segundo componente sensor.
Preferiblemente, el primer componente sensor comprende una primer tensor para aplicar una primera fuerza seleccionada entre la primera porción de la tibia proximal y el primer cóndilo del fémur distal a través de las primeras paletas tibial y femoral, y una primera escala de desplazamiento para indicar el primer desplazamiento entre la primera porción de la tibia proximal y el primer cóndilo del fémur distal determinado por las primeras paletas tibial y femoral, y el segundo componente sensor comprende un segundo tensor para aplicar una segunda fuerza seleccionada entre la segunda porción de la tibia proximal y el segundo cóndilo del fémur distal a través de las segundas paletas tibial y femoral, y el segundo componente sensor también comprende una segunda escala de desplazamiento para indicar el segundo desplazamiento entre la segunda porción de la tibia proximal y el segundo cóndilo del fémur distal determinado por las segundas paletas tibial y femoral.
Preferiblemente, el primer componente sensor comprende un alojamiento que tiene un extremo superior al que se acopla la primera paleta tibial y una escala de desplazamiento en el mismo,
un cilindro de desplazamiento tiene un extremo superior al que se acopla la primera paleta femoral y un extremo inferior acoplado telescópicamente con el extremo superior del alojamiento,
un cilindro tensor tiene un extremo superior acoplado telescópicamente con un extremo inferior del alojamiento y el extremo inferior del primer cilindro de desplazamiento, teniendo el cilindro tensor una pluralidad de intervalos de fuerza en el mismo, y
un resorte entre el extremo superior del cilindro de desplazamiento y el extremo inferior del cilindro tensor para aplicar una fuerza a la primera paleta femoral que es dependiente de un desplazamiento entre el extremo superior del cilindro de desplazamiento y el extremo inferior del cilindro tensor,
en el que el cilindro de desplazamiento tiene un indicador en el mismo para indicar el primer desplazamiento y un intervalo de fuerza de la pluralidad de intervalos de fuerza en el que está situada la primera fuerza.
Preferiblemente, el primer componente sensor comprende un raíl acoplado al alojamiento, el raíl se extiende más allá del extremo inferior de la carcasa, el cilindro tensor está acoplado al raíl a través de un mecanismo de bloqueo, y el cilindro de bloque permite que el cilindro tensor se mueva respecto al raíl y al alojamiento cuando está desbloqueado y evita que el cilindro tensor se mueva respecto al raíl y... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo quirúrgico ortopédico (10, 10', 10") , que comprende:
un primer componente sensor (20, 20', 20") que comprende un primer conjunto de paletas (24, 24', 24") que tiene una primera paleta tibial (26, 26', 26") y una primera paleta femoral (32, 32', 32") que se extienden desde el primer componente sensor (20, 20', 20") en una primera dirección general de extensión (D) para contactar respectivamente con una tibia proximal (210) y un fémur distal (220) de un paciente, siendo desplazable la primera paleta femoral (32, 32', 32") respecto a la primera paleta tibial (26, 26', 26") para determinar un primer desplazamiento entre la tibia proximal (210) y el fémur distal (220) ;
un segundo componente sensor (40, 40', 40") acoplado al primer componente sensor (20, 20', 20") , comprendiendo el segundo componente sensor (40, 40', 40") un segundo conjunto de paletas (44, 44', 44") que tiene una segunda paleta tibial (46, 46', 46") y una segunda paleta femoral (52, 52', 52") que se extienden desde el segundo componente sensor (40, 40', 40") en la primera dirección general de extensión (D) para contactar respectivamente con la tibia proximal (210) y el fémur distal (220) del paciente, siendo la segunda paleta femoral (52, 52', 52") desplazable respecto a la segunda paleta tibial (46, 46', 46") para determinar un segundo desplazamiento entre la tibia proximal (210) y el fémur distal (220) ; y caracterizado por
un mecanismo de deslizamiento (120, 120'. 120") dispuesto para acoplar de manera deslizante el primer componente sensor (20, 20', 20") con el segundo componente sensor (40, 40', 40") para permitir que el primer componente sensor ( 20, 20', 20") y el segundo componente sensor (40, 40', 40") se deslicen entre sí en la primera dirección general de extensión (D) , de modo que uno de los conjuntos de paletas (20, 20', 20", 44, 44', 44") se extienda más allá del otro conjunto de paletas en la primera dirección general de extensión (D) .
2. Dispositivo ortopédico quirúrgico (10, 10', 10") según la reivindicación 1, en el que la primera paleta tibial (26, 26', 26") comprende una pista (122) del mecanismo de deslizamiento (120, 120', 120") , y la segunda paleta tibial (46, 46', 46") comprende una corredera (124) acoplada de forma deslizable a la pista (124) para permitir que el segundo componente (40, 40', 40") se deslice en relación con el primer componente (20, 20', 20") a lo largo de la pista (122) de la primera paleta tibial (26, 26', 26") .
3. Dispositivo ortopédico quirúrgico (10, 10', 10") según la reivindicación 2, en el que la pista (122) está acoplada hacia y se extiende más allá de un extremo anterior de la primera paleta tibial (26, 26', 26") que está acoplada al primer componente sensor, y la corredera (24) está acoplada hacia un extremo anterior (50, 50', 50") de la segunda paleta tibial (46, 46', 46") que está acoplada al segundo componente sensor (40, 40', 40") .
4. Dispositivo ortopédico quirúrgico (10, 10', 10") según la reivindicación 2 o la reivindicación 3, en el que la pista
(122) está acoplada o incorporada de otro modo en la primera paleta tibial (26, 26', 26") y la corredera (24) está acoplada a o incorporada de otro modo en la segunda paleta tibial (46, 46', 46") cerca de un punto medio entre un extremo posterior de la segunda paleta tibial y un extremo anterior de la segunda paleta tibial.
5. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 1, en el que:
el primer componente sensor (20, 20') comprende un primer tensor (82, 82') para aplicar una primera fuerza entre la tibia proximal (210) y el fémur distal (220) a través del primer conjunto de paletas (24, 24') ; y
el segundo componente sensor (40, 40') comprende un segundo tensor (82, 82') para aplicar una segunda fuerza entre la tibia proximal (210) y el fémur distal (220) a través del segundo conjunto de paletas (44, 44') .
6. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 1, en el que:
el primer componente sensor (20, 20') comprende un primer tensor (82, 82') para aplicar una primera fuerza seleccionada entre la tibia proximal (210) y el fémur distal (220) a través del primera conjunto de paletas (24, 24') ; y
el segundo componente sensor (40, 40') comprende un segundo tensor (82) para aplicar una segunda fuerza seleccionada entre la tibia proximal (210) y el fémur distal (220) a través del segundo conjunto de paletas (44, 44') .
7. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 1, en el que:
el primer componente sensor (20, 20') también comprende una primera escala de desplazamiento (108) para indicar el primer desplazamiento entre la tibia proximal (210) y el fémur distal (220) determinado por el primer conjunto de paletas (24, 24') ; y
el segundo componente sensor (40, 40') también comprende una segunda escala de desplazamiento (108) para indicar el segundo desplazamiento entre la tibia proximal (210) y el fémur distal (220) determinado por
el segundo conjunto de paletas (44, 44') .
8. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 1, en el que:
el primer componente sensor (20, 20') comprende un primer tensor (82) para aplicar una primera fuerza seleccionada entre la tibia proximal (210) y el fémur distal (220) a través del primer conjunto de paletas (24, 24') , y una primera escala de desplazamiento (108) para indicar el primer desplazamiento entre la tibia proximal (210) y el fémur distal (220) determinado por el primer conjunto de paletas (24, 24') ; y
el segundo componente sensor (40, 40') comprende un segundo tensor (82) para aplicar una segunda fuerza seleccionada entre la tibia proximal (210) y el fémur distal (220) a través del segundo conjunto de paletas (44, 44') , y el segundo componente sensor (40, 40') también comprende una segunda escala de desplazamiento (108) para indicar el segundo desplazamiento entre la tibia proximal (210) y el fémur distal
(220) determinado por el conjunto de la segunda paleta (44, 44') .
9. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 8, en el que el primer componente sensor (20, 20') comprende:
un alojamiento (70) que tiene un extremo superior (72) al que está acoplada la primera paleta tibial (26, 26') ;
un cilindro de desplazamiento (76) que tiene un extremo superior (78) al que está acoplada la primera paleta femoral (32, 32') y un extremo inferior (80) acoplado telescópicamente con el extremo superior (72) de la carcasa (70) ;
un cilindro tensor (82) tiene un extremo superior (84) acoplado telescópicamente con un extremo inferior
(74) del alojamiento (70) y el extremo inferior (80) del primer cilindro de desplazamiento (76) ; y
un resorte (100) entre el extremo superior (78) del cilindro de desplazamiento (76) y el extremo inferior (86) del cilindro tensor (82) para aplicar una fuerza a la primera paleta femoral (32, 32') que es dependiente de un desplazamiento entre el extremo superior (78) del cilindro de desplazamiento (76) y el extremo inferior
(86) del cilindro tensor (82) .
10. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 9, en el que:
el primer componente sensor (20, 20') comprende un raíl (90) acoplado al alojamiento (70) ;
el cilindro tensor (82) está acoplado al raíl (90) a través de un mecanismo de bloqueo (92) ; y
el mecanismo de bloqueo (92) permite que el cilindro tensor (82) se mueva respecto al alojamiento (70) cuando se desbloquea y evita que el cilindro tensor (82) se mueva respecto al alojamiento (70) cuando está bloqueado.
11. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 9, en el que el primer componente sensor (20, 20') comprende:
una escala de desplazamiento (108) sobre el alojamiento (70) ;
una pluralidad de intervalos de fuerza (100) sobre el cilindro tensor (82) ; y
un indicador (106) sobre el cilindro de desplazamiento (76) , en el que el indicador (106) sobre el cilindro de desplazamiento (76) indica el primer desplazamiento y un intervalo de fuerzas de la pluralidad de intervalos de fuerzas (110) en el que está dispuesta la primera fuerza.
12. Dispositivo ortopédico quirúrgico (10, 10') según la reivindicación 1, en el que el primer conjunto de paletas (24, 24') y el segundo conjunto de paletas (44, 44') tienen recortes (25, 25'; 45, 45') de tendón rotuliano para permitir la entrada del primer conjunto de paletas (24, 24') y el segundo conjunto de paletas (44, 44') entre la tibia (210) y el fémur (220) sin la eversión de una rótula del paciente.
Patentes similares o relacionadas:
Sistema de extracción de instrumento quirúrgico ortopédico, del 3 de Junio de 2020, de DePuy Ireland Unlimited Company: Un sistema de extracción de instrumentos quirúrgicos que comprende: una primera herramienta de extracción que tiene un primer cuerpo que se extiende entre […]
Procedimiento de fabricación de un implante, principalmente vertebral o intervertebral, e implante obtenido por este procedimiento, del 27 de Mayo de 2020, de MEDICREA INTERNATIONAL: Procedimiento de fabricación de un implante , principalmente vertebral o intervertebral, comprendiendo este implante (1, 21, […]
Conjuntos de jaulas intervertebrales extensibles, del 27 de Mayo de 2020, de Robinson, James, C: Una jaula expansible para su inserción en un espacio intervertebral caracterizada porque comprende: un cuerpo de jaula que tiene una porción superior y […]
Método para ensamblar una prótesis ortopédica femoral, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un método para ensamblar una prótesis ortopédica, el método comprendiendo: alineando una construcción de prueba femoral con un instrumento […]
Instrumental mínimamente invasivo para la entrega de un espaciador interespinoso, del 6 de Mayo de 2020, de VERTIFLEX, INC: Un instrumento de inserción para un espaciador interespinoso, que comprende: un cuerpo cilíndrico alargado que tiene un extremo proximal […]
Aparato para alinear una copa acetabular, del 29 de Abril de 2020, de DePuy Ireland Unlimited Company: Una copa acetabular que comprende: una cubierta sustancialmente hemisférica que tiene un borde , en donde un eje de copa de la copa acetabular pasa a través […]
Implante óseo, del 1 de Abril de 2020, de Attenborough Dental Laboratories Limited: Un implante para su uso en el cuerpo, caracterizándose el implante por que la conformación de al menos una parte de la superficie del implante […]
Prótesis interina de articulación, del 1 de Abril de 2020, de WALDEMAR LINK GMBH & CO. KG: Prótesis interina de articulación insertable en un hueso tubular para reemplazar a una endoprótesis de articulación que se debe explantar, en la que la […]