Dispositivo para el posicionamiento de camarones.
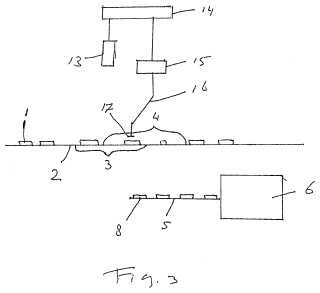
Dispositivo (13-17) para el posicionamiento de camarones (1) en una posición predefinida (8) y con unaorientación predefinida en una superficie de depósito (7),
los camarones (1) siendo suministrados al dispositivo enuna posición y orientación aleatorias, en donde los camarones posteriormente son alimentados a un dispositivo dedescamación automática, caracterizado porque el dispositivo (13-17) comprende un dispositivo de obtención deimágenes (13) dispuesto para tomar y grabar imágenes de los camarones (19) suministrados, un brazo robótico (16)con medios de agarre (17) para recoger un camarón (1) suministrado y depositarlo en una posición predefinida (8) ycon una orientación predefinida en la superficie de depósito (7) y un control (14) que está conectado con eldispositivo de obtención de imágenes (13) y el brazo robótico (16).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11195629.
Solicitante: Heiploeg B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: Panserweg 14 9974 SL Zoutkamp PAISES BAJOS.
Inventor/es: VEERMAN,JACOBUS JOHANNES MICHEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A22C25/12 NECESIDADES CORRIENTES DE LA VIDA. › A22 CARNICERIA; TRATAMIENTO DE LA CARNE; TRATAMIENTO DE LAS AVES DE CORRAL O DEL PESCADO. › A22C TRATAMIENTO DE LA CARNE, DE LAS AVES DE CORRAL O DEL PESCADO (conservas A23B; producción de composiciones a base de proteínas para la alimentación A23J 1/00; productos alimenticios a base de pescado, carne o aves de corral A23L; trituración, p. ej. picado de la carne B02C 18/00; preparación de proteínas en sí C07K 1/00). › A22C 25/00 Tratamiento del pescado. › Presentación del pescado, p. ej. según la posición de la cabeza o de la cola.
- A22C29/02 A22C […] › A22C 29/00 Tratamiento de mariscos o crustáceos, p. ej. ostras, langostas. › Tratamiento de los camarones, bogavantes o similares.
- B65G47/244 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › haciéndolos girar alrededor de un eje sensiblemente perpendicular al plano de transporte.
PDF original: ES-2431809_T3.pdf
Fragmento de la descripción:
Dispositivo para el posicionamiento de camarones
La invención se refiere a un dispositivo para el posicionamiento de camarones en una posición predefinida y con una orientación predefinida en una superficie de depósito, los camarones siendo suministrados al dispositivo en una orientación y posición aleatoria.
Dicho dispositivo es conocido. Los dispositivos conocidos comprenden esencialmente medios mecánicos para posicionar los camarones. En la EP 0743010 B1 por ejemplo se ha descrito un dispositivo de alimentación y posicionamiento mecánico, que se usa para la alimentación de los camarones a un dispositivo de descamación. El dispositivo de descamación requiere que los camarones sean colocados en una cierta posición y en una cierta orientación en una cinta transportadora. Para este medio de alimentación y posicionamiento mecánico se describe que utilizan una cinta transportadora vertical que coge los camarones del contenedor, y deposita los camarones a través de diferentes tolvas en una cinta de posicionamiento final desde donde se alimentan al dispositivo de descamación. Dicho dispositivo para alimentar y posicionar los camarones que está compuesto de varias cintas transportadoras y tolvas tiene la desventaja de que un número no despreciable de los camarones posicionados finaliza en una posición no muy correcta, que lleva a un número considerable de camarones descamados incompletamente o camarones que son dañados por el dispositivo de descamación y consecuentemente se pierden.
Es por lo tanto un objetivo de la presente invención el proporcionar un dispositivo para el posicionamiento de camarones en donde los camarones se pueden posicionar de un modo preciso en una posición predefinida y con una orientación predefinida, de tal manera que cuando los camarones son posteriormente alimentados a un dispositivo de descamación automático, la descamación puede tener lugar de una forma fiable y de tal forma que el número de camarones que se pierden por descamación errónea es considerablemente más pequeña que con el dispositivo de alimentación conocido.
El objetivo se consigue por un dispositivo para el posicionamiento de camarones que está caracterizado porque el dispositivo comprende un dispositivo de obtención de imágenes para tomar y grabar imágenes de los camarones suministrados, y que comprende un brazo robótico con medios de agarre para recoger un camarón suministrado y para depositarlo en una superficie de depósito en una posición predefinida y con una orientación predefinida, así como un control que está conectado con el dispositivo de obtención de imágenes y el brazo robótico. Es una ventaja importante que los camarones pueden ahora ser suministrados al dispositivo de acuerdo con la invención en una posición aleatoria y una orientación aleatoria sin ningún problema. Por medio del dispositivo de obtención de imágenes la posición de los camarones puede ser después reconocida lo que permite al brazo robótico recoger los camarones de un modo apropiado y el brazo robótico posteriormente los deposita en una superficie de depósito en un posición predefinida y con una orientación predefinida. El brazo robótico recoge los camarones uno a uno y posiciona los camarones individuales de la forma deseada en la superficie de depósito. A pesar de la vulnerabilidad de los camarones (un camarón de media pesa alrededor de 2 gr.) pareció sorprendentemente posible posicionar los camarones en la superficie de depósito en la mencionada posición predefinida y con la orientación predefinida de tal forma que los camarones posteriormente automáticamente pueden ser descamados del modo apropiado, y esto de un modo muy preciso y a una escala industrial, es decir, con una velocidad relativamente alta.
Se observa de la GB-A-2415944 que se conoce el uso de un dispositivo de obtención de imágenes para tomar y grabar imágenes de productos alimenticios suministrados, y un control acoplado a el que maneja un brazo robótico con medios de agarre para recoger estos productos alimenticios y depositarlos en una posición predefinida y con una orientación predefinida en una superficie de depósito. En esta publicación esencialmente concierne a pechugas y muslos de pollo, de los cuales, con respecto al peso y tamaño, tanto el manejo así como la precisión de la orientación es menos sensible como es en el caso de los camarones. En particular la sensibilidad de los camarones para el posicionamiento correcto y la vulnerabilidad de los camarones para un manejo apropiado hace para una persona experto no obvio el considerar una publicación general como la GB-A-2415944 aplicable como una fuente posible de una solución del problema para el suministro controlado y preciso de camarones, sin dañar estos camarones, en otra manera mejor de la que se propone en la EP-A-0743010.
En una realización efectiva el control comprende medios de reconocimiento para reconocer un camarón así como determinar su posición y orientación, usando características predeterminadas en una imagen grabada, que es tomada y grabada por el dispositivo de obtención de imágenes. Esto permite al control controlar el brazo robótico y dirigirlo a la posición apropiada para recoger el camarón y también tener en cuenta la orientación que tiene el camarón en la posición de recogida. El control también comprende medios de determinación de la posición para determinar el desarrollo de la posición a lo largo del tiempo del camarón reconocido. Utilizando imágenes consecutivas de las que el intervalo de tiempo se conoce, se puede determinar la velocidad y dirección del movimiento y a través de estas el brazo robótico puede ser dirigido a la posición apropiada para recoger el camarón.
En una realización preferida del dispositivo de acuerdo con la invención el suministro de los camarones tiene lugar en una cinta transportadora de suministro. Esto hace posible que los camarones se muevan sobre un plano fijo y conocido de tal forma que la posición de los camarones en ese plano puede ser determinada con precisión usando una cámara fija y procesamiento de imágenes. Debido a que una cinta transportadora habitualmente tiene una velocidad constante, es muy simple determinar de dos o posiblemente más imágenes el desarrollo de la posición en el tiempo de los camarones reconocidos. También es relativamente simple con medios conocidos, como un dispositivo de vibración, asegurar que los camarones en la cinta transportadora se colocan separados entre sí de tal forma que la recogida por el brazo robótico puede ser realizada individualmente para cada camarón sin tocar ninguno de los camarones colindantes.
Cuando la superficie de depósito está situada en una cinta transportadora de extracción, el depositar los camarones recogidos en la superficie de depósito se simplifica fuertemente, de tal forma que cada camarón depositado puede ser depositado en la misma posición especial debido a que la superficie de depósito es una superficie móvil. El camarón una vez depositado se moverá con la cinta transportadora y liberará su posición para un siguiente camarón a ser depositado.
En una realización muy ventajosa de la invención el brazo robótico se mueve sincrónicamente con la cinta transportadora de suministro en la recogida del camarón. En este cado la velocidad relativa entre el brazo robótico y el camarón es cero o aproximadamente cero de tal forma que la recogida puede tener lugar de forma muy precisa y sin ningún daño para el camarón.
Aunque es posible, y se ha mencionado anteriormente, que la velocidad de la cinta transportadora de suministro se determine comparando dos o más imágenes del dispositivo de obtención de imágenes, la velocidad de la cinta transportadora de suministro se puede determinar también usando un sensor que está conectado al control.
En el caso de que la superficie de depósito esté en otra cinta transportadora, el posicionamiento del camarón por el brozo robótico al depositarlo en la superficie de posición se puede hacer con precisión aumentada cuando el brazo robótico se mueve sincrónicamente con la cinta transportadora de extracción. Así bien los camarones no estarán sometidos a aceleración durante el depósito de tal forma que se elimina la probabilidad de que el camarón cambie de posición y orientación como resultado de una aceleración en su depósito. Es posible que la velocidad de la cinta transportadora de extracción esté predefinida y grabada en el control. Sin embargo, es también posible que la velocidad de la cinta transportadora de extracción se determine usando un sensor que está conectado al control. Es particularmente ventajoso que cuando la velocidad de la cinta transportadora de extracción esté predefinida y grabada en el control, la velocidad... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (13-17) para el posicionamiento de camarones (1) en una posición predefinida (8) y con una orientación predefinida en una superficie de depósito (7) , los camarones (1) siendo suministrados al dispositivo en una posición y orientación aleatorias, en donde los camarones posteriormente son alimentados a un dispositivo de descamación automática, caracterizado porque el dispositivo (13-17) comprende un dispositivo de obtención de imágenes (13) dispuesto para tomar y grabar imágenes de los camarones (19) suministrados, un brazo robótico (16) con medios de agarre (17) para recoger un camarón (1) suministrado y depositarlo en una posición predefinida (8) y con una orientación predefinida en la superficie de depósito (7) y un control (14) que está conectado con el dispositivo de obtención de imágenes (13) y el brazo robótico (16) .
2. El dispositivo (13-17) de acuerdo con la reivindicación 1, caracterizado porque el control (14) está organizado para procesar imágenes que han sido tomadas por el dispositivo de obtención de imágenes (13) y comprende:
- medios de reconocimiento para reconocer en una imagen grabada un camarón así como determinar su posición y orientación, usando características predefinidas,
- medios de determinación de la posición para determinar el desarrollo de la posición a lo largo del tiempo del camarón (1) reconocido.
3. El dispositivo (13-17) de acuerdo con las reivindicaciones 1 ó 2, caracterizado porque el suministro de los camarones (1) es por una cinta transportadora de suministro (2) .
4. El dispositivo (13-17) de acuerdo con las reivindicaciones 1 a 3, caracterizado porque la superficie de depósito
(7) está en una cinta transportadora de extracción (5) .
5. El dispositivo (13-17) de acuerdo con las reivindicaciones 3 ó 4, caracterizado porque el brazo robótico (16) durante la recogida de un camarón (1) se mueve junto con la cinta transportadora de suministro (2) .
6. El dispositivo (13-17) de acuerdo con la reivindicación 5, caracterizado porque la velocidad de la cinta transportadora de suministro (2) es determinada comparando dos imágenes del dispositivo de obtención de imágenes (13) .
7. El dispositivo de acuerdo con la reivindicación 5, caracterizado porque la velocidad de la cinta transportadora de suministro (2) se determina usando un sensor conectado al control (14) .
8. El dispositivo (13-17) de acuerdo con una de las reivindicaciones 4 a 7, caracterizado porque durante el depósito el brazo robótico (16) se mueve junto con la cinta transportadora de extracción (5) .
9. El dispositivo (13-17) de acuerdo con la reivindicación 8, caracterizado porque la velocidad de la cinta transportadora de extracción (5) se predetermina y se graba en el control (14) .
10. El dispositivo (13-17) de acuerdo con la reivindicación 9, caracterizado porque la velocidad de la cinta transportadora de extracción (5) se puede cambiar.
11. El dispositivo (13-17) de acuerdo con la reivindicación 8, caracterizado porque la velocidad de la cinta transportadora de extracción (5) se determina usando un sensor conectado al control (14) .
12. El dispositivo (13-17) de acuerdo con una de las reivindicaciones 2 a 11, caracterizado porque las características predefinidas pueden ser modificadas.
13. El dispositivo (13-17) de acuerdo con una de las reivindicaciones 1 a 12, caracterizado porque el dispositivo comprende dos brazos robóticos (16) esencialmente iguales pero controlables de forma separada.
14. El dispositivo (13-17) de acuerdo con una de las reivindicaciones 1 a 13, caracterizado porque los medios de agarre (17) comprenden al menos una ventosa (17) .
Patentes similares o relacionadas:
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato de transferencia para un final de línea de una plegadora-encoladora, del 3 de Julio de 2019, de VEGA S.r.l: Aparato de transferencia para un final de línea de una plegadora-encoladora para cajas de cartón, que comprende un lecho de transferencia […]
Transportador de recipientes para máquina, del 15 de Mayo de 2019, de Makro Labelling S.r.l: Un transportador que puede utilizarse desde o hacia una máquina para recipientes , que comprende: al menos un módulo base que tiene […]
Conjunto de rodillos multidireccionales, del 25 de Marzo de 2019, de LAITRAM L.L.C.: Un sistema (400, 500, 500', 900, 1200, 1300, 1400) transportador que comprende: una formación de conjuntos de rodillos multidireccionales […]
 Máquina transportadora para contenedores, del 13 de Febrero de 2019, de Makro Labelling S.r.l: Una máquina transportadora para contenedores , que comprende:
al menos un módulo base que tiene una longitud predeterminada a lo largo de una dirección […]
Máquina transportadora para contenedores, del 13 de Febrero de 2019, de Makro Labelling S.r.l: Una máquina transportadora para contenedores , que comprende:
al menos un módulo base que tiene una longitud predeterminada a lo largo de una dirección […]
Manipulador de piezas, del 18 de Enero de 2019, de DÜOTECHNICK MANUTENCION S.A: Manipulador de piezas que comprende: - un girador motorizado que comprende dos punteros paralelos y verticales accionados por un motor […]
Peine de transferencia y sistema de transferencia entre dos transportadores de cinta, del 5 de Octubre de 2018, de AFHER EUROBELT, S.A.: Peine de transferencia y sistema de transferencia entre dos transportadores de cinta. Un peine (100, 100') y un sistema de transferencia entre dos transportadores de […]
 Dispositivo y procedimiento de posicionamiento de productos, del 27 de Septiembre de 2018, de C.E.R.M.E.X. CONSTRUCTIONS ETUDES ET RECHERCHES DE MATERIELS POUR L'EMBALLAGE D'EXPEDITION: Dispositivo de posicionamiento para posicionar unos productos simultáneamente a su transporte, sobre un transportador unos detrás de otros en un […]
Dispositivo y procedimiento de posicionamiento de productos, del 27 de Septiembre de 2018, de C.E.R.M.E.X. CONSTRUCTIONS ETUDES ET RECHERCHES DE MATERIELS POUR L'EMBALLAGE D'EXPEDITION: Dispositivo de posicionamiento para posicionar unos productos simultáneamente a su transporte, sobre un transportador unos detrás de otros en un […]