Dispositivo para el control de la vibración de una estructura.
Dispositivo para el control de oscilaciones de una construcción (30) con
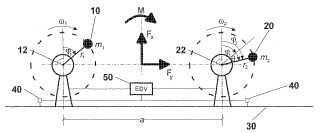
- dos cuerpos de masas (10,
20), que están alojados de forma giratoria, respectivamente, alrededor de un eje de rotación (12, 22), de manera que ambos ejes de rotación se extienden en la misma dirección y el centro de gravedad de cada cuerpo de masas presenta un radio (r1, r2) respecto al eje de rotación (12, 22) asociado, y de manera que una distancia entre el eje de rotación de un cuerpo de masas y el eje de rotación de otro cuerpo de masas de cero se puede ajustar como variable de ajuste;
- un accionamiento, que desplaza cada cuerpo de masas (10, 20) en un movimiento de rotación circundante,
- al menos un sensor (40), que detecta un movimiento o aceleración de la construcción (30), y
- un control (50), que controla, sobre la base del movimiento detectado o de la aceleración, al menos una de las siguientes variables de ajuste de los dos cuerpos de masas para la generación de variables de fuerza resultantes, para controlar la oscilación de una construcción conectada con el dispositivo:
- el ángulo de giro (φ1, φ2) del movimiento de rotación de al menos un cuerpo de masas (10, 20),
- la distancia (a) del eje de rotación (12) de un cuerpo de masas (10) respecto del eje de rotación (22) del otro cuerpo de masas (20).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/010953.
Solicitante: SOLETANCHE FREYSSINET.
Nacionalidad solicitante: Francia.
Dirección: 133 BOULEVARD NATIONAL 92500 RUEIL MALMAISON FRANCIA.
Inventor/es: STAROSSEK,UWE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16F15/22 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 15/00 Supresión de las vibraciones en los sistemas (dispositivos de suspensión de los asientos de vehículos B60N 2/50 ); Medios o dispositivos para evitar o reducir las fuerzas de desequilibrio, p. ej. debidas al movimiento (ensayo estático o equilibrado dinámico de máquinas o estructuras G01M 1/00). › Compensación de las fuerzas de inercia.
PDF original: ES-2422274_T3.pdf
Fragmento de la descripción:
Dispositivo para el control de la vibración de una estructura Las estructuras de construcción, los vehículos terrestres, acuáticos, aéreos y espaciales así como otras máquinas, aparatos e instalaciones, designados en general a continuación como construcciones, son excitados a través de fuerzas que actúan dinámicamente a oscilaciones, que pueden perjudicar la capacidad de uso, la durabilidad y la estabilidad o seguridad funcional. La posibilidad y las repercusiones de tales oscilaciones deben investigarse en el proyecto de construcción. Las oscilaciones deben suprimirse o limitarse, en caso necesario, a través de medidas adecuadas. Una medida posible es el refuerzo de la construcción, lo que condiciona, sin embargo, una necesidad elevada de material, peso más elevado y costes más elevados.
Una alternativa conveniente y económica pueden ser los sistemas de control pasivos o activos, que introducen fuerzas que contrarrestan las oscilaciones en la construcción y de esta manera reducen el perjuicio de la oscilación. En el caso de los llamados amortiguadores mecánicos activos, estas fuerzas adicionales son generadas la mayoría de las veces a través del desplazamiento o aceleración de masas auxiliares. En el caso de esta intervención regular selectiva, el desplazamiento o aceleración de la masa auxiliar son variables de ajuste, que deben calcularse y ajustarse (circuito de regulación) en función de los parámetros del sistema y del movimiento medido de la construcción y eventualmente de las condiciones ambientales medidas. Tales sistemas ya se emplean en edificios altos en regiones de terremotos (ver Hausner, G. W.; Bergmann, L. A.; Caughey, T. K.; Chassiskos, A. G.; Claus, R. O; Masri; S. F.; Skelton, R. E.; Soong, T. T.; Spencer, B. F.; Yao, J. T. P. “Structural Control: Past, Present, and Future”. Journal of Engineering Mechanics, 9 (123) , 1997, 897-971) .
Los requerimientos planteados a los dispositivos para el control de las oscilaciones son múltiples y son parcialmente contradictorios en las consecuencias de diseño. Por una parte, las variables de fuerza generadas por el sistema de control deben ser regulables de la manera más discrecional posible en el tiempo y en el espacio. Por otra parte, el principio de construcción debe ser lo más sencillo posible en interés de alta seguridad funcional y costes reducidos de creación. Otros criterios son alta robustez del circuito de regulación y una necesidad de energía lo más reducida posible.
Se conoce a partir del documento WO 2005/116340 A1 un dispositivo para la amortiguación de un movimiento oscilante en una estructura de soporte, que presenta una pareja de cuerpos de masas alojados de forma pivotable, que están dispuestos sobre lados opuestos de un eje. Un accionamiento regula los cuerpos de masas alrededor de un ángulo predeterminado en un plano perpendicularmente al eje de conformidad con una unidad de control, que reacciona a valores medido de la posición de la estructura de soporte y/o del movimiento de la estructura de soporte. El movimiento de articulación está limitado en este caso a una zona angular determinada.
Se conoce a partir del documento WO 2006/029851 un dispositivo de amortiguación para la amortiguación de un movimiento oscilante, en el que una pareja de cuerpos de masas están fijados en los dos extremos de una viga alojada de forma giratoria y que están dispuestos sobre lados opuestos de un eje de giro o de oscilación de la viga, pudiendo predeterminarse o influirse sobre el movimiento giratorio o movimiento oscilante de la viga activamente desde un actuador o pasivamente por medio de elementos de resorte y/o elementos de amortiguación. La disposición relativa de ambos cuerpos de masas está predeterminada fijamente en este caso a través de la viga.
Se conoce a partir de Patent Abstrachts of Japan 06147258 A un dispositivo para la amortiguación de vibraciones. El dispositivo está constituido por una rueda de engranaje con un dentado interior, en el que engrana una segunda rueda dentada con un dentado exterior. La segunda rueda dentada posee el semi-diámetro de la rueda de engranaje exterior y está provista en la zona del borde con un peso. A través de un brazo de palanca dispuesto en el centro se desplaza la segunda rueda dentada en un movimiento de rotación dentro de la rueda de engranaje exterior.
Se conoce a partir de Patent Abstrachts of Japan 2000120764 A un dispositivo para la amortiguación de vibraciones, en el que dos discos giratorios uno con relación al otro están provistos con discos más pequeños dispuestos excéntricamente. Los discos más pequeños llevan excéntricamente un peso. A través de la regulación de la posición angular de los discos más pequeños con relación al disco mayor se puede ajustar la distancia del peso con respecto al eje de rotación.
Se conoce a partir de Patent Abstrachts of Japan 02096064 A u dispositivo para el control de vibraciones en edificios altos. El dispositivo posee dos masas que están alojadas, respectivamente, de forma giratoria sobre un brazo en el dispositivo. Está previsto controlar la longitud del brazo de rotación, mientras que los cuerpos de masas giran en sentido opuesto entre sí.
El documento FR2845744 A se refiere a un dispositivo y a un procedimiento para la reducción de oscilaciones, que son transmitidas desde un chasis de automóvil y muestra un dispositivo para el control de oscilaciones de una construcción con
- dos cuerpos de masas, que están alojados de forma giratoria, respectivamente, alrededor de un eje de rotación, de manera que ambos ejes de rotación se extienden en la misma dirección y el centro de gravedad de cada cuerpo de masas presenta un radio respecto al eje de rotación asociado,
- un accionamiento, que desplaza cada cuerpo de masa en un movimiento de rotación circundante,
- al menos un sensor, que detecta un movimiento o aceleración de la construcción, y
- un control, que controla, sobre la base del movimiento detectado o de la aceleración, la siguiente variable de ajuste de los dos cuerpos de masas para la generación de variables de fuerza resultantes, para controlar la oscilación de una construcción conectada con el dispositivo:
- el ángulo de giro del movimiento de rotación de al menos un cuerpo de masas.
El cometido de la invención es proporcionar un dispositivo para el control de la oscilación de una construcción, en el que se cumplen mejor los requerimientos existentes que a través de dispositivos conocidos y de una manera ponderada.
Este cometido se soluciona por medio de un dispositivo para el control de la oscilación de una construcción con las características de la reivindicación 1. Las configuraciones ventajosas son objeto de las reivindicaciones dependientes.
El dispositivo de acuerdo con la invención para el control de la oscilación de una construcción se define con las características de la reivindicación 1.
Para el dispositivo de acuerdo con la invención se implanta y se utiliza aquí la designación de rotor de doble desequilibrio.
Cada cuerpo de masas forma un desequilibrio a través de la distancia de su centro de gravedad respecto al eje de rotación asociado. Ambos ejes de rotación se extienden en la misma dirección, es decir, que se extienden paralelos. Pueden presentar una distancia entre sí o pueden estar dispuestos sin distancia entre sí, es decir, coincidentes. El sentido de giro de cada cuerpo de masas es en primer lugar discrecional. Ambos cuerpos de masas realizan un movimiento de rotación circundante. Cada cuerpo de masas que forma un desequilibrio genera en este caso, en virtud de las fuerzas centrípetas, una fuerza variable en el tiempo sobre su eje de rotación.
Las variables de fuerza resultantes generadas a través de los dos cuerpos de masas circundantes, que son ejercidas por el dispositivo para el control de la oscilación, dependen en este caso de la configuración del dispositivo. En particular, las magnitudes de las dos masas, las velocidades de rotación de los dos cuerpos de masas, una relación de fases entre los dos movimientos de rotación (a la misma velocidad cuantitativa) así como la distancia del eje de rotación de un cuerpo de masas respecto del eje de rotación de otro cuerpo de masas tienen una influencia decisiva. Dichas variables de influencia pueden estar en este caso, en principio, predeterminadas fijamente o pueden ser variables. A través del control previsto de acuerdo con la invención de al menos una de las variables decisiva de acuerdo con la redacción de la reivindicación 1 se consigue una influencia selectiva de las variables de fuerza resultantes, para controlar, es decir, especialmente amortiguar la oscilación de una construcción... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para el control de oscilaciones de una construcción (30) con
- dos cuerpos de masas (10, 20) , que están alojados de forma giratoria, respectivamente, alrededor de un eje de rotación (12, 22) , de manera que ambos ejes de rotación se extienden en la misma dirección y el centro de gravedad de cada cuerpo de masas presenta un radio (r1, r2) respecto al eje de rotación (12, 22) asociado, y de manera que una distancia entre el eje de rotación de un cuerpo de masas y el eje de rotación de otro cuerpo de masas de cero se puede ajustar como variable de ajuste;
- un accionamiento, que desplaza cada cuerpo de masas (10, 20) en un movimiento de rotación circundante,
- al menos un sensor (40) , que detecta un movimiento o aceleración de la construcción (30) , y
- un control (50) , que controla, sobre la base del movimiento detectado o de la aceleración, al menos una de las siguientes variables de ajuste de los dos cuerpos de masas para la generación de variables de fuerza resultantes, para controlar la oscilación de una construcción conectada con el dispositivo:
-el ángulo de giro (q1, q2) del movimiento de rotación de al menos un cuerpo de masas (10, 20) ,
- la distancia (a) del eje de rotación (12) de un cuerpo de masas (10) respecto del eje de rotación (22) del otro cuerpo de masas (20) .
2. Dispositivo de acuerdo con la reivindicación 1, caracterizado porque las velocidades de rotación (01, 02) de los dos cuerpos de masas (10, 20) son de la misma magnitud en cuanto al importe.
3. Dispositivo de acuerdo con una de las reivindicaciones 1 ó 2, caracterizado porque los dos cuerpos de masas (10, 20) tienen la misma masa.
4. Dispositivo de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque el radio (r1, r2) de un cuerpo de masas respecto del eje de rotación (12, 22) asociado al cuerpo de masas (10, 20) es de la misma magnitud para ambos cuerpos de masas (10, 20) .
5. Dispositivo de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque al menos uno de los dos cuerpos de masas (10, 20) está constituido por cuerpos de masas parciales (20a, 20b) , que están distanciados entre sí en la dirección de los ejes de rotación (12, 22) .
6. Dispositivo de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque las designaciones de las fases entre los movimientos de rotación de los cuerpos de masas (10, 20 o bien 10, 20a, 20b) son regulables por medio de un acoplamiento mecánico.
7. Dispositivo de acuerdo con una de las reivindicaciones 1 a 6, caracterizado porque los movimientos de rotación de los dos cuerpos de masas (10, 20) son en sentido opuesto.
8. Dispositivo de acuerdo con una de las reivindicaciones 1 a 7, caracterizado porque está combinado con un segundo dispositivo de acuerdo con una de las reivindicaciones 1 a 7, en el que los ejes de rotación (12, 22, 72, 82) del primero y del segundo dispositivo se extienden en la misma dirección.
9. Dispositivo de acuerdo con la reivindicación 8, caracterizado porque los ejes de rotación (12, 22, 72, 82) de los cuerpos de masas (10, 20, 70, 80) de ambos dispositivos coinciden.
10. Dispositivo de acuerdo con la reivindicación 8 ó 9, caracterizado porque está combinado con un segundo dispositivo de acuerdo con la reivindicación 8 ó 9, en el que los ejes de rotación (12, 22, 72, 82) del primero y del segundo dispositivo se extienden en la misma dirección.
11. Dispositivo de acuerdo con una de las reivindicaciones 8 a 10, caracterizado porque las designaciones de las fases entre los movimientos de rotación de los cuerpos de masas (10, 20, 70, 80 o bien 10, 20a, 20b, 70a, 70b, 80a, 80b) se pueden regular por medio de un acoplamiento mecánico.
12. Dispositivo de acuerdo con una de las reivindicaciones 1 a 11, caracterizado porque el control (50) , que genera instrucciones para el control del dispositivo en virtud de los valores de medición de al menos un sensor, está diseñado como regulación.
13. Dispositivo de acuerdo con una de las reivindicaciones 1 a 12, caracterizado porque varios dispositivos están dispuestos distribuidos sobre la construcción (30) .
14. Dispositivo de acuerdo con una de las reivindicaciones 1 a 13, caracterizado porque el control (50) controla, sobre la base del movimiento o aceleración detectados, el radio de al menos un cuerpo de masas respecto de su eje de rotación asociado.
Patentes similares o relacionadas:
 Dispositivo con transportador de productos y accionamiento transversal, del 1 de Enero de 2014, de WEBER MASCHINENBAU GMBH BREIDENBACH: Dispositivo con un transportador de productos accionable en una dirección de transporte y un accionamientotransversal, a través del cual se puede mover el transportador […]
Dispositivo con transportador de productos y accionamiento transversal, del 1 de Enero de 2014, de WEBER MASCHINENBAU GMBH BREIDENBACH: Dispositivo con un transportador de productos accionable en una dirección de transporte y un accionamientotransversal, a través del cual se puede mover el transportador […]
MOTOR CON MECANISMO EQUILIBRADOR, del 30 de Junio de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Motor incluyendo un mecanismo de manivela (1b), y un mecanismo equilibrador (1h) configurado para impedir vibraciones producidas por el mecanismo de manivela (1b), donde una […]
SISTEMA DE ACCIONAMIENTO PARA UN LAMINADOR., del 16 de Julio de 2005, de SMS MEER GMBH: Sistema de accionamiento para un laminador, en particular para un laminador en frío a paso de peregrino, con - al menos una caja de laminación […]
COMPENSADOR ALTERNATIVO., del 1 de Febrero de 2001, de ORTUO FERNANDEZ,JOSE: Esta invención consiste en agregar peso a las bielas por la parte exterior de la cabeza, en sentido longitudinal de la misma para trasladar su centro de […]
APARATO COMPENSADOR DE VIBRACIONES, del 16 de Junio de 1998, de F.L. SMIDTH & CO A/S: SE PRESENTA UN APARATO COMPENSADOR DE VIBRACIONES PARA CONTRARRESTAR VIBRACIONES ARMONICAS DE UNA FUENTE DE EXCITACION QUE COMPRENDE UNA PRIMERA […]
DISPOSITIVO PARA EL EQUILIBRADO DE UN DISCO ABRASIVO, QUE PUEDE GIRAR ALREDEDOR DE UN EJE DE ROTACION, del 1 de Marzo de 1997, de HOFMANN MASCHINENBAU GMBH: DISPOSITIVO PARA EL EQUILIBRADO DE UN DISCO ABRASIVO, QUE PUEDE GIRAR ALREDEDOR DE UN EJE A DE ROTACION, CON PESOS 1,2 DE EQUILIBRADO, QUE […]
VOLANTE DE ALMACENADO DE ENERGIA CON COJINETES MAGNETICOS SUPROCONDUCTORES., del 1 de Marzo de 1997, de ARCH DEVELOPMENT CORPORATION: UN VOLANTE QUE TIENE COJINETES SUPERCONDUCTORES TIENE UNA RELACION DE RESISTENCIA MECANICA CON RESPECTO A LA ELEVACION QUE SE TRADUCE EN UNA MEJORA DEL […]
 PROCEDIMIENTO DE EQUILIBRADO PARA MOTOR Y DISPOSITIVO PARA LA PUESTA EN PRACTICA DE ESTE PROCEDIMIENTO, del 16 de Noviembre de 2008, de HUTCHINSON: Procedimiento de equilibrado para un motor que genera un par de desequilibrado de orden 1, par de desequilibrado que excita al menos un modo vibratorio, […]
PROCEDIMIENTO DE EQUILIBRADO PARA MOTOR Y DISPOSITIVO PARA LA PUESTA EN PRACTICA DE ESTE PROCEDIMIENTO, del 16 de Noviembre de 2008, de HUTCHINSON: Procedimiento de equilibrado para un motor que genera un par de desequilibrado de orden 1, par de desequilibrado que excita al menos un modo vibratorio, […]