DISPOSITIVO AUTÓNOMO DE TRANSPORTE Y ELEVACIÓN DE CARGAS.
Dispositivo autónomo de transporte y elevación de cargas que comprende unos primeros medios (1,
2, 3) configurados para el movimiento del conjunto y unos segundos medios elevadores de cargas (7) que se caracteriza porque los primeros medios comprenden, al menos un bastidor (1) que sustenta al menos cuatro ruedas, en donde dos de ellas son de giro libre respecto del eje principal (2), no estando además motorizadas, mientras que las otras dos ruedas (3) están motorizadas y con una orientación fija respecto de su eje vertical; y los segundos medios elevadores de cargas (7) están soportados en el bastidor (1) y son accionados eléctricamente con motores de corriente alterna a partir de fuentes de energía autónomas sobre el vehículo, tales como baterías o grupo electrógeno.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031703.
Solicitante: SELMETRON S.L.
Nacionalidad solicitante: España.
Inventor/es: ORPI FARRE, JORDI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62B3/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62B VEHICULOS PROPULSADOS A MANO, p. ej. COCHES DE MANO O COCHES DE NIÑO; TRINEOS (caracterizados por la propulsión animal B62C; propulsión de trineos por el conductor o por motor B62M). › B62B 3/00 Coches de mano que tienen más de un eje que llevan ruedas que sirven para el desplazamiento; Dispositivos de dirección con este fin; Aparellaje con este fin. › para recoger la carga simplemente del suelo, p.ej. carro elevador de poca altura (dispositivos desplazables sobre ruedas o sobre un dispositivo análogo para elevar o descender mercancías voluminosas o pesadas para su carga o descarga, p.ej. carros de horquilla elevadora, B66F 9/06).
- B66F11/04 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 11/00 Dispositivos de elevación adaptados especialmente a fines especiales, no previstos en otro lugar (dispositivos sobre los vehículos, que toman contacto con el suelo para soportar, elevar o maniobrar el vehículo B60S 9/00). › para plataformas o cabinas móviles, p. ej. sobre vehículos, que permiten a los obreros ocupar cualquier posición conveniente para ejecutar los trabajos requeridos (plataformas para limpiar las ventanas A47L 3/02; dispositivos para rescatar personas de los edificios de construcción A62B 1/02; bajo el aspecto vehículo en lo que se refiere a vehículos utilitarios B60P 3/14; pasarelas para el mantenimiento de puentes E01D 19/10; andamiajes sobre basamentos extensibles E04G 1/22; plataformas susceptibles de ser elevadas o bajadas, utilizables sobre escalas E06C 7/16).
Fragmento de la descripción:
El objeto principal de la presente invención es un sistema autónomo de transporte y elevación de cargas, formado por un sistema móvil, un sistema de elevación de cargas, un sistema de alimentación y un mecanismo adicional de giro de ruedas motorizadas destinado tanto a levantar como a transportar cargas pesadas.
ANTECEDENTES DE LA INVENCIÓN
Existen en la actualidad diversos tipos de carros o carretillas elevadoras de tamaño reducido preparadas para tomar, trasladar horizontalmente y elevar hasta una altura suficiente para introducir y depositar una carga en una estantería o en la caja de un vehículo, así como para realizar las maniobras inversas. Dichas carretillas disponen de un accionamiento motorizado, aunque se conoce algún tipo de carretilla de accionamiento manual apta para pequeñas cargas y de construcción rudimentaria.
Ejemplo de esto, es el modelo de utilidad ES 1 070 504 U, "Carro para transporte y elevación de cargas", que consiste en un bastidor fijo, que presenta una configuración en "L" cuya trama horizontal dispone de cuatro ruedas de apoyo, dos traseras resistentes y dos delanteras de menor tamaño, que permiten el traslado del carro cargado por una superficie próxima a la horizontal con gran facilidad; una estructura de carga, que se sitúa encima de dicho bastidor, que presenta una configuración también en "L" y está provista de unos medios de desplazamiento en sentido vertical, unos medios de guiado y unos medios de retención en cualquier posición intermedia, durante el movimiento en sentido vertical; un mecanismo de elevación de la plataforma de carga consistente en un cabestrante cuyo cable se fija en un punto superior del bastidor, pasa una polea situada en la estructura de carga y se enrolla en un tambor de enrollamiento del cable ubicado encima del bastidor, que se acciona por medio de una manivela montada en un engranaje reductor; unos medios de guiado de la plataforma de carga en su desplazamiento en sentido vertical, situados en ambos costados y consistentes en unas ruedas que apoyan en sendos carriles definidos en los costados del bastidor en su trama vertical; y unos medios de retención de la plataforma de carga en cualquier posición intermedia, en su desplazamiento en sentido vertical, consistentes en un trinquete que impide el descenso de la carga FIGl. Muestra un esquema del dispositivo autónomo de transporte y elevación de
mientras está bloqueado.
5 Sería deseable un dispositivo autónomo de transporte y elevación de cargas que esté motorizado y que permita el movimiento libre del mismo en un determinado recinto.
DESCRIPCIÓN DE LA INVENCIÓN
1 O Para paliar los problemas arriba mencionados, se presenta el presente dispositivo autónomo de transporte y elevación de cargas que comprende unos primeros medios configurados para el movimiento del conjunto y unos segundos medios elevadores de cargas.
15 Los primeros medios comprenden, al menos, un bastidor que sustenta al menos cuatro ruedas, en donde dos de ellas son de giro libre respecto del eje principal, no estando además motorizadas, mientras que las otras dos ruedas están motorizadas y con una orientación fijable respecto de su eje vertical.
20 Los segundos medios elevadores de cargas están soportados en el bastidor y son accionados eléctricamente; y en donde las ruedas motorizadas incluyen sensores de posición que envían su señal a un elemento de control centralizado de la posición de las ruedas motorizadas.
25 Este elemento de control centralizado configurado para la activación de los motores en los primeros y segundos medios cuando se pueda realizar correctamente el movimiento de los medios elevadores, e inhibición de la activación en otros supuestos.
30 Con ello se obtiene un vehículo para la elevación y transporte de cargas autónomo y sencillo de implementar. BREVE DESCRIPCIÓN DE LAS FIGURAS
35
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.cargas objeto de la presente invención.
FIG2. Muestra esquemáticamente dos realizaciones (Fig.2A y Fig.2B) del bastidor
que sustenta las ruedas del dispositivo objeto de la presente invención.
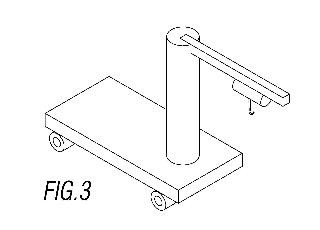
FIG3. Muestra una vista esquematizada en perspectiva de un dispositivo de acuerdo con la presente invención a modo de carro grúa.
FIG4. Muestra una vista esquematizada en perspectiva de un dispositivo de acuerdo con la invención a modo de elevador montacargas.
FIG5. Muestra una vista esquematizada en perspectiva de un dispositivo de acuerdo a modo de pórtico.
REALIZACIÓN PREFERENTE DE LA INVENCIÓN
Tal y como se puede observar en las figuras adjuntas, el dispositivo autónomo de transporte y elevación de cargas, objeto de la presente invención comprende, al menos un bastidor 1 que sustenta al menos cuatro ruedas, en donde dos de ellas son de giro libre respecto del eje principal 2, no estando además motorizadas, mientras que las otras dos ruedas 3 están motorizadas y con una orientación fijable respecto de su eje vertical.
El bastidor 1 puede adoptar diversas formas. En la Fig.2A se observa como el bastidor 1 adopta una estructura de cuadrilátero 4, disponiéndose las ruedas (2, 3) en los vértices de dicho cuadrilátero. Otra solución al bastidor 1 se muestra en la Fig.2B en donde las ruedas de giro libre 2 y las ruedas motrices 3 están solidariamente unidas por un primer eje (5, 5') mientras dichos ejes (5, 5') están a su vez unidos por un segundo eje transversal 6.
El sistema de tracción motorizado es del tipo diferencial. Además, existe un control individual de la velocidad de cada una de las ruedas motrices 3, tanto en magnitud de velocidad, como en el sentido de giro, estando configurado para diversas combinaciones como, por ejemplo, que una de las ruedas motrices 3 esté parada y la otra en movimiento, las dos ruedas motrices 3 en movimiento pero una en sentido contrario a la otra, entre otras posibles combinaciones, lo cual posibilita los desplazamientos en línea recta o diversos giros del dispositivo de forma autónoma. Los motores que accionan el movimiento del dispositivo pueden ser de corriente alterna o de corriente continua.Sobre el bastidor 1 y soportado por él, se encuentran los medios de elevación de cargas 7, donde dichos medios son al menos uno seleccionado entre: una grúa pórtico (véase la figura 5) ; una grúa de brazo rígido con polipasto (véase la figura 3) ; una grúa de brazo giratorio con polipasto; un elevador tipo montacargas (véase la figura 4) ; un elevador de tipo horquilla; y una combinación de los anteriores.
En todos los casos los medios de elevación de cargas 7 están accionados mediante un motor eléctrico, de corriente alterna, bien de inducción trifásico o bien un motor síncrono. Además, los medios de elevación de cargas 7, y también los de traslación del vehículo si son de corriente alterna, consiguen su autonomía mediante uno de los siguientes esquemas:
a) La energía eléctrica primaria se obtiene de un grupo electrógeno, conectado con un inversor (variador de velocidad) y el motor del elevador 7 (véase la figura 1 ) , o bien directamente conectando el motor del elevador 7 con el grupo electrógeno; o b) La energía primaria se obtiene a través de baterías, según alguna de las siguientes formas de conexión:
1. Un conversor de corriente continua conectado con la batería o baterías y con un inversor o variador de velocidad que alimenta el motor del elevador 7. Este esquema se aplica cuando la tensión de salida de la batería no es suficientemente alta, de tal forma que la tensión de salida del conversor eleva esta corriente continua para que el inversor la adapte a la del motor. Valores típicos a la salida de la batería son 48V, con lo que el conversor puede alcanzar a la salida 31 OV de tal forma que el inversor pueda obtener una tensión alterna de 230V apta para la alimentación del motor del elevador 7.
2. Una batería directamente conectada con el inversor, que alimenta el motor del elevador 7. Un valor típico de salida de la batería puede ser 390V, de tal forma que el inversor pueda obtener una tensión alterna de 230V apta para la alimentación del motor del elevador 7.
3. Un inversor monofásico conectado a la salida de la batería, un transformador elevador y un inversor trifásico conectado con el motor del elevador 7. Valores típicos a la salida de la batería son 48V, con lo que el inversor monofásico alcanza a la salida 24/'-l2V de tal forma queel transformador pueda obtener una tensión alterna de 230V monofásica...
Reivindicaciones:
1. Dispositivo autónomo de transporte y elevación de cargas que comprende unos primeros medios (1 , 2, 3) configurados para el movimiento del conjunto y unos segundos medios elevadores de cargas (7) que se caracteriza porque los primeros medios comprenden, al menos un bastidor (1) que sustenta al menos cuatro ruedas, en donde dos de ellas son de giro libre respecto del eje principal (2) , no estando además motorizadas, mientras que las otras dos ruedas (3) están motorizadas y con una orientación fijable respecto de su eje vertical; y
los segundos medios elevadores de cargas (7) están soportados en el bastidor
(1) y dichos primeros y segundos medios son accionados eléctricamente por medios de alimentación eléctrica autónomos;
y en donde las ruedas motrices (3) incluyen sensores de posición (9) que envían su señal a un elemento de control centralizado (1 O) de la posición de dichas ruedas motrices (3) ; estando este elemento de control centralizado (1 O) configurado para la activación de los motores (3, 7) en los primeros medios cuando se pueda realizar correctamente el movimiento, e inhibición de la activación en otros supuestos.
2. Dispositivo de acuerdo con la reivindicación 1 que se caracteriza porque el bastidor (1) adopta una estructura de cuadrilátero (4) , disponiéndose las ruedas (2, 3) en los vértices de dicho cuadrilátero (4) .
3. Dispositivo de acuerdo con la reivindicación 1 que se caracteriza porque el bastidor (1) adopta una estructura en donde las ruedas de giro libre (2) y las ruedas motrices (3) están solidariamente unidas por un primer eje (5, 5') mientras dichos primeros ejes (5, 5') están a su vez unidos por un segundo eje transversal (6) .
4. Dispositivo de acuerdo con las reivindicaciones anteriores que se caracteriza porque las ruedas motorizadas y de orientación fija (3) es del tipo diferencial, y donde además, existe un control individual de la velocidad de cada una de dichas ruedas motrices (3) , tanto en magnitud de velocidad, como en el sentido de giro, estando configurado para diversas combinaciones entre ambas ruedas motrices (3) .
5. Dispositivo de acuerdo con las reivindicaciones anteriores que se caracteriza porque comprende un mecanismo adicional de giro para cambiar la
orientación de las ruedas de giro libre y orientable (2) , en 90º realizándose el giro a mano, logrando que se desplacen lateralmente, es decir, perpendicularmente al eje principal del vehículo.
5 1º 6.Dispositivo de acuerdo con las reivindicaciones anteriores que se caracteriza porque comprende un grupo electrógeno autónomo, conectado con un inversor y los medios elevadores de cargas (7) , o bien directamente conectando los medios elevadores de cargas (7) con el grupo electrógeno para el suministro de la energía eléctrica empleada en el funcionamiento de los medios elevadores de cargas (7) .
15
7. Dispositivo de acuerdo con las reivindicaciones anteriores que se caracteriza porque comprende baterías para el suministro de la energía eléctrica empleada en el funcionamiento de los medios elevadores de cargas (7) , y traslación en caso de motores de corriente alterna, y medios de transformación electrónica para convertir la corriente continua original en corriente alterna que alimenta los medios elevadores e carga (7) .
Patentes similares o relacionadas:
Sistema de brazos adaptables para carretillas de mano, del 30 de Abril de 2020, de MARTI DOMENECH, FRANCISCO JAVIER: 1. Sistema de brazos adaptables para carretillas de mano los cuales pueden ser colocados en diferentes posiciones para facilitar el transporte, caracterizado […]
Dispositivo de elevación de mercancías paletables, del 24 de Julio de 2019, de Sprick GmbH Bielefelder Papier- und Wellpappenwerke & Co: Dispositivo de elevación de mercancías paletables para cargar y descargar un palé de transporte, tal como un palé estándar , por ejemplo un […]
Combinador de mando para el control de un accionamiento de un vehículo industrial accionado por motor, del 20 de Febrero de 2019, de REMA Lipprandt GmbH & Co. KG: Combinador de mando para el control del accionamiento de un vehículo industrial accionado por motor con dos sensores Hall , separados […]
DISPOSITIVO DE CONVERSIÓN DE MODO DE MANEJO DE UN VEHÍCULO YVEHÍCULO QUE COMPRENDE DICHO DISPOSITIVO, del 17 de Enero de 2019, de PASSION MOTORBIKE FACTORY, S.L: 1. Dispositivo de conversión de modo de manejo de un vehículo a motor en transpaleta, apto para habilitar tanto la circulación en modo vehículo por áreas habilitadas para […]
Dispositivo de transporte y utilización, del 27 de Noviembre de 2018, de Pester Pac Automation GmbH: Dispositivo de transporte para cargas, en particular para un soporte de carga que aloja una carga, con un accionamiento para la dirección y la circulación, con […]
Carretilla para transportar mercancías, del 6 de Junio de 2018, de ULMA Servicios de Manutención, S. Coop: Carretilla para transportar mercancías, que comprende un bastidor sustancialmente horizontal sobre el que se disponen las mercancías a transportar, que comprende dos brazos […]
Conjunto motor para transpaleta, del 22 de Febrero de 2017, de Newell, Gregory: Un conjunto motor para transpaleta , fijado a una transpaleta , con ruedas de dirección izquierda y derecha , que se compone […]
Sistema de manipulación de herramientas, del 10 de Agosto de 2016, de ISHIDA EUROPE LIMITED: Sistema que comprende un sistema de manipulación de herramientas para transportar una herramienta de precintado, comprendiendo el sistema […]