Determinación de errores de propagación.
Procedimiento para la determinación de un error en la propagación de ondas electromagnéticas en una atmósferaque presenta partículas eléctricamente cargadas,
en el que
- se evalúa una primera señal, transmitiéndose la primera señal mediante una primera onda electromagnéticapor la atmósfera y presentando la primera onda electromagnética una primera frecuencia de oscilación,
- se evalúa al menos una segunda señal, transmitiéndose la segunda señal mediante una segunda ondaelectromagnética por la atmósfera y presentando la segunda onda electromagnética una segunda frecuenciade oscilación que es distinta de la primera frecuencia de oscilación,
- se determina una medida para un contenido y/o una densidad de partículas eléctricamente cargadas(medida de carga) a partir de la primera señal y a partir de la segunda señal,
- la medida de carga se usa para determinar un término de una trayectoria de propagación de una terceraonda electromagnética o un término de una magnitud equivalente a la trayectoria de propagación,dependiendo el término, aparte de la medida de carga, también de la frecuencia de oscilación y de unparámetro de corrección magnética (BF) para considerar la influencia de un campo magnético del planeta,
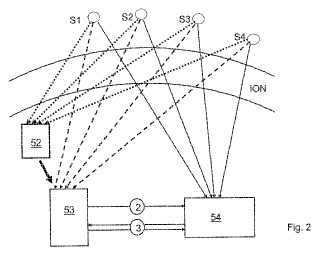
- usándose el parámetro de corrección magnética (BF) en función exclusivamente del ángulo de elevación (ε)y del ángulo acimutal (α) de la trayectoria de rayos de un emisor (S1 - S4) de la primera y segunda ondaelectromagnética a un receptor (54) sobre la superficie del planeta para la corrección, pudiendo calcularse elparámetro de corrección (BF) para una región geográfica del planeta en la que se encuentra el receptor (54) en función del ángulo de elevación (ε) y del ángulo acimutal (a) con ayuda de coeficientes del polinomioconstantes determinados para la región geográfica.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07006840.
Solicitante: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Nacionalidad solicitante: Alemania.
Dirección: LINDER HOHE 51147 KOLN ALEMANIA.
Inventor/es: JAKOWSKI,NORBERT, HOQUE,MOHAMMED MAINUL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/07 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando datos para corregir los datos de posicionamiento medidos, p. ej. DGPS [GPS diferencial] o correcciones ionosféricas.
- G01S19/23 G01S 19/00 […] › Ensayo, monitorización, corrección o calibrado de un elemento receptor.
PDF original: ES-2423008_T3.pdf
Fragmento de la descripción:
Determinación de errores de propagación La invención se refiere a un procedimiento y una disposición para la determinación de un error en la propagación de ondas electromagnéticas en una atmósfera que presenta partículas eléctricamente cargadas.
Las ondas de radio electromagnéticas de todos los sistemas de comunicación y/o navegación asistidos por satélites están sujetos a la interacción con el plasma de la ionosfera. La interacción es dispersiva, es decir, fuertemente dependiente de la frecuencia (proporcional a 1/f2) y a frecuencias de oscilación f con más de 10 GHz prácticamente insignificante.
En la región de banda L utilizada por el GNSS (sistema global de navegación por satélite, de Global Navigation Satellite System) no pueden despreciarse los efectos de propagación ionosféricos no rectilíneos. Por este motivo es importante el conocimiento del estado actual de la ionosfera y la toma de medidas de la compensación de errores.
La base de la determinación de la posición con GNSS son mediciones de la fase de código y portadora. La fase medida se determina por la longitud de fase fnds en la que n designa el índice de refracción ionosférico y s el
elemento de la trayectoria de rayos (o trayectoria de propagación) . En la óptica geométrica se determina la propagación de la radio de onda, además del principio de Fermat (el principio de la llegada más corta) , de manera que puede encontrarse la trayectoria de propagación con el mínimo de longitud de fase. Esto conduce a un índice de refracción n distinto de 1 a una trayectoria de rayos prolongada o error de retardo en comparación con el caso de comparación de la propagación de la onda a vacío. Por último lugar, en un GNSS, el error repercute falseando la distancia determinada del receptor de las señales entre el satélite y el receptor. Por tanto, en esta descripción se habla por razones de sencillez de un error de la trayectoria de rayos, incluso cuando la trayectoria de rayos prolongada real que han recorrido las ondas electromagnéticas en su trayectoria de la fuente de rayos al receptor no sea la única causa de error. Como causas de error se consideran especialmente una curvatura de la trayectoria de rayos y una interacción de la onda con el medio que recorre la onda. Sin embargo, la invención no se limita a GNSS, incluso cuando se hable de un error de la trayectoria de rayos.
Para el índice de refracción es válida una relación no lineal compleja de distintos parámetros geofísicos (estado de ionización, campo magnético) y parámetros geométricos (elevación, acimut) . La primera aproximación del índice de refracción causa el errores de distancia en el orden de magnitud de hasta 100 m que son eliminables en GNSS mediante mediciones de dos frecuencias. Los procedimientos correspondientes son conocidos. Los errores de mayor orden en el índice de refracción (~1/fm, m> 2) se encuentran en el orden de magnitud de hasta varios centímetros.
Ya se ha propuesto mediante la medición y evaluación de señales que se recibieron a distintas frecuencias portadoras (frecuencias de oscilación) corregir los errores de primer orden (m=2) , así como los errores debidos a la trayectoria de propagación curvada. Sin embargo, existe además la necesidad de una reducción del error residual de segundo orden (m=3) que en GNSS puede encontrarse, por ejemplo, en el orden de magnitud de varios centímetros. Sin embargo, la invención no se limita a GNSS. Más bien, la invención también puede usarse para la corrección, por ejemplo, en la detección remota mediante radar, por ejemplo, en la corrección de los efectos de la rotación de Faraday en el radar de banda L.
Mientras que los errores de primer orden dl (1) (m=2) pueden eliminarse relativamente fácilmente mediante una combinación lineal de mediciones de fase de dos frecuencias, esto no es posible en los errores de mayor orden y la disponibilidad de solo dos frecuencias como en GPS (sistema de posicionamiento global, de Global Positioning System) . Por este motivo, el problema se ha ignorado hasta ahora en la práctica de la medición. Los errores resultantes de esto quedan generalmente sin ser reconocidos. Se manifiestan en posiciones no inequívocas o falsamente determinadas. En series de medición más largas como es habitual en la geodesia, estos errores pueden determinarse incluso en parte de manera que apenas se noten.
Bassieri S. y col.: “Higher-order ionospheric effects on the Global Positioning System observables and means of modeling them” Manuscripta Geodaetica, tomo 18, nº 5 1993, páginas 280-289, XP009087044 ISSN: 0340-8825, describen efectos ionosféricos de mayor orden sobre las magnitudes de observación de sistemas de posicionamiento globales y medios de modelado. Se estima que el efecto de la ionosfera sobre las señales de GPS para los usuarios de la tierra se mueve basándose en un modelo realista de la densidad electrónica de la ionosfera y utilizando una aproximación del momento dipolar para el campo magnético de la tierra. La ecuación 21 del documento describe una aproximación del retraso ionosférico de segundo orden. La aproximación depende de la latitud magnética 8m.
Fraile-Ordonez J.: “Real-time TEC determination for ionospheric modeling in WADGPS” Proceedings of the institute of Navigation (ION) GPS, tomo 2, 1995, páginas 1193-1197, XP002385759 describe un algoritmo para el cálculo en tiempo real del contenido electrónico total (TEC) ionosférico. El cálculo se basa en un algoritmo que se aplica en mediciones de GPS de dos frecuencias.
Es un objetivo de la presente invención especificar un procedimiento y una disposición del tipo mencionado al principio que haga posible una determinación más precisa del error de la trayectoria de propagación o una determinación del error residual. A este respecto se renunciará opcionalmente a la utilización de dispositivos de medición adicionales y a trayectos de medición que se realicen, por ejemplo, con ayuda de satélites adicionales.
Las reivindicaciones adjuntas definen el ámbito de protección.
La invención se basa en la idea de que el contenido electrónico de la atmósfera, especialmente de la ionosfera, puede determinarse de forma fidedigna y con bajo coste técnico de aparatos.
Para esto pueden usarse especialmente señales que se recibieron a diferentes frecuencias portadoras al final de su trayectoria de propagación por la atmósfera y cuya trayectoria de propagación va a determinarse o a corregirse para determinar una medida del contenido y/o la densidad de partículas eléctricamente cargadas en la atmósfera. Esta medida de carga hace posible determinar con más precisión y opcionalmente corregir los errores de la trayectoria de propagación.
Una ventaja de esta manera de proceder consiste en que la medida de carga se determina exactamente para aquella región de la atmósfera de la que es importante en la determinación de errores. Sin embargo, también es posible determinar la medida de carga mediante mediciones separadas (con respecto a la atmósfera) independientemente del sitio o al menos en función de la región y ponerlas a disposición para la determinación de errores. En el caso de la determinación de la medida de carga puede recurrirse a su vez a señales que se transmitieron y recibieron a distintas frecuencias portadoras. Como medida de carga se usa preferiblemente el contenido electrónico de una trayectoria de propagación (o de una parte de la trayectoria) recorrida por la señal respectiva. El contenido electrónico (lineal referido a una única dimensión espacial) se define como la integral de la densidad electrónica sobre la trayectoria de propagación o sobre la parte de la trayectoria. A una densidad electrónica localmente poco variable también puede determinarse la densidad electrónica incluso como medida de carga y usarse para la corrección de errores o puede usarse un valor medio de la densidad electrónica.
Otra ventaja consiste en que no debe formarse una combinación lineal de señales de dos o varias frecuencias para determinar los errores o los errores residuales. A una combinación lineal tal empeora la relación de señal/ruido.
Especialmente se propone lo siguiente: un procedimiento para la determinación de un error en la propagación de ondas electromagnéticas en una atmósfera que presente partículas eléctricamente cargadas, en el que
- se evalúa una primera señal, transmitiéndose la primera señal mediante una primera onda electromagnética por la atmósfera y presentando la primera onda electromagnética una primera frecuencia de oscilación,
- se evalúa al menos una segunda señal, transmitiéndose la segunda señal mediante una segunda... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación de un error en la propagación de ondas electromagnéticas en una atmósfera que presenta partículas eléctricamente cargadas, en el que
- se evalúa una primera señal, transmitiéndose la primera señal mediante una primera onda electromagnética por la atmósfera y presentando la primera onda electromagnética una primera frecuencia de oscilación,
- se evalúa al menos una segunda señal, transmitiéndose la segunda señal mediante una segunda onda electromagnética por la atmósfera y presentando la segunda onda electromagnética una segunda frecuencia de oscilación que es distinta de la primera frecuencia de oscilación,
- se determina una medida para un contenido y/o una densidad de partículas eléctricamente cargadas (medida de carga) a partir de la primera señal y a partir de la segunda señal,
- la medida de carga se usa para determinar un término de una trayectoria de propagación de una tercera onda electromagnética o un término de una magnitud equivalente a la trayectoria de propagación, dependiendo el término, aparte de la medida de carga, también de la frecuencia de oscilación y de un parámetro de corrección magnética (BF) para considerar la influencia de un campo magnético del planeta,
- usándose el parámetro de corrección magnética (BF) en función exclusivamente del ángulo de elevación (s) y del ángulo acimutal (a) de la trayectoria de rayos de un emisor (S1 - S4) de la primera y segunda onda electromagnética a un receptor (54) sobre la superficie del planeta para la corrección, pudiendo calcularse el parámetro de corrección (BF) para una región geográfica del planeta en la que se encuentra el receptor (54) en función del ángulo de elevación (s) y del ángulo acimutal (a) con ayuda de coeficientes del polinomio constantes determinados para la región geográfica.
2. Procedimiento según la reivindicación precedente, en el que la tercera onda electromagnética es la primera o segunda onda electromagnética.
3. Procedimiento según una de las reivindicaciones precedentes, en el que el término depende de la tercera potencia de la frecuencia de oscilación.
4. Procedimiento según una de las reivindicaciones precedentes, en el que el término se usa para corregir un resultado para la trayectoria de propagación.
5. Procedimiento según una de las reivindicaciones precedentes, en el que la propagación de una señal cuya trayectoria de propagación se determinará se simula por un cálculo de modelo y como resultado de la simulación se obtiene el error de la trayectoria de propagación.
6. Procedimiento según la reivindicación precedente, en el que la medida de carga y/o una información sobre un campo magnético que influye en la propagación de la primera y/o segunda señal se usa/n como magnitudes de entrada del cálculo de modelo.
7. Procedimiento según la reivindicación precedente, en el que las magnitudes de entrada o al menos una parte de las magnitudes de entrada se determina/n por un dispositivo en el sitio de un receptor, recibiendo el receptor la onda electromagnética para la que se determinará el error de propagación.
8. Procedimiento según una de ambas reivindicaciones precedentes, en el que las magnitudes de entrada o al menos una parte de las magnitudes de entrada se determina/n en un sitio que está alejado del sitio de un receptor que recibe la onda electromagnética.
9. Procedimiento según la reivindicación precedente, en el que la determinación del término y opcionalmente la corrección del error de la trayectoria de propagación también se realiza/realizan en un sitio que está alejado del sitio de un receptor que recibe la onda electromagnética.
10. Procedimiento según una de las reivindicaciones precedentes, en el que el parámetro de corrección magnética (BF) se determina para un sitio de referencia sobre la superficie del planeta y el valor determinado del parámetro de corrección magnética (BF) se usa para receptores dentro de una región sobre la superficie del planeta para la determinación del término.
11. Disposición para la determinación de un error en la propagación de ondas electromagnéticas en una atmósfera que presenta partículas eléctricamente cargadas, presentando la siguiente disposición:
- un dispositivo de evaluación (55) que está configurado para evaluar una primera señal, transmitiéndose la primera señal mediante una primera onda electromagnética por la atmósfera y presentando la primera onda electromagnética una primera frecuencia de oscilación,
- un dispositivo de evaluación (55) que está configurado para evaluar una segunda señal, transmitiéndose la segunda señal mediante una segunda onda electromagnética por la atmósfera y presentando la segunda onda electromagnética una segunda frecuencia de oscilación que es distinta de la primera frecuencia de
oscilación,
-un dispositivo de determinación (56) que está configurado para determinar a partir de la primera señal y a partir de la segunda señal una medida para un contenido y/o una densidad de partículas eléctricamente cargadas (medida de carga) ,
-un dispositivo de determinación de errores (57) que está configurado para determinar usando la medida de carga un término de una trayectoria de propagación de una tercera onda electromagnética o un término de una magnitud equivalente a la trayectoria de propagación (por ejemplo, un tiempo de propagación) , dependiendo el término, aparte de la medida de carga, también de la frecuencia de oscilación y de un parámetro de corrección magnética (BF) para considerar la influencia de un campo magnético del planeta
- usándose el parámetro de corrección magnética (BF) en función exclusivamente del ángulo de elevación (s) y del ángulo acimutal (a) de la trayectoria de rayos de un emisor (S1 - S4) de la primera y segunda onda electromagnética a un receptor (54) sobre la superficie del planeta, pudiendo calcularse el parámetro de corrección (BF) para una región geográfica del planeta en la que puede encontrarse el receptor (54) en función del ángulo de elevación (s) y del ángulo acimutal (a) con ayuda de coeficientes del polinomio constantes determinados para la región geográfica.
12. Disposición según la reivindicación precedente, en la que el dispositivo de determinación de errores está dispuesto en el sitio del dispositivo de evaluación o de los dispositivos de evaluación.
13. Disposición según una de las dos reivindicaciones precedentes, en la que el dispositivo de determinación está dispuesto en otro sitio distinto al dispositivo de evaluación o a los dispositivos de evaluación y está conectado mediante una red informática y/o una red de radio al o a los dispositivos de evaluación.
Patentes similares o relacionadas:
SISTEMA DE INSPECCIÓN EN VUELO Y PROCEDIMIENTO PARA DICHO SISTEMA, del 29 de Abril de 2019, de INGENIO 3000, S.L: Sistema de inspección en vuelo, del tipo que comprenden, al menos, un sensor óptico para toma de imágenes montado en un gimbal a su vez montado […]
POSICIONAMIENTO OPTIMIZADO DE DISPOSITIVOS ELECTRÓNICOS DE BAJO CONSUMO ENERGÉTICO, del 21 de Diciembre de 2017, de ROKUBUN S.L: Diferentes aspectos de la invención implementan una arquitectura distribuida que permite a dispositivos móviles de bajo consumo energético procesar la información de […]
Receptor SBAS mejorado, del 2 de Agosto de 2017, de TELESPAZIO S.P.A: Un receptor SBAS configurado para recibir mensajes SBAS que contienen datos de aumentación y para proporcionar a uno o más receptores GPS […]
Sistema y procedimiento de difusión de información en un sistema de satélites de doble frecuencia, del 19 de Abril de 2017, de THALES: Procedimiento para transmitir información o datos "de corrección" Da en un sistema de navegación para satélites de doble frecuencia que comprende al menos un satélite […]
Proporcionar y usar mensajes que comprenden información de localización, del 22 de Marzo de 2017, de Nokia Technologies OY: Un método que comprende: recibir o ensamblar un mensaje que incluye información de localización y un identificador de tiempo de referencia, […]
Procedimiento y sistema de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras emitidas por satélites y de correcciones ionosféricas, del 8 de Febrero de 2017, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Procedimiento de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras de primera, segunda y tercera frecuencias distintas, de valores […]
Sistema de aumento de la disponibilidad y de las prestaciones de un sistema de geolocalización por satélite, del 23 de Noviembre de 2016, de THALES: Sistema de aumento de las prestaciones de un sistema de geolocalización por satélite compuesto al menos por un satélite y al menos por un receptor de posicionamiento […]
Instalación de vigilancia para un sistema de determinación de posición por satélite aumentado y sistema de determinación de posición por satélite aumentado, del 26 de Octubre de 2016, de Thales Deutschland GmbH: Instalación de vigilancia para un sistema de determinación de posición por satélite, aumentado, el cual presenta una estación de referencia con una instalación […]