Cápsula sin hilos que libera una pinza quirúrgica.
Una cápsula sin hilos para la entrega de una pinza quirúrgica en un lugar objetivo en el tracto gastrointestinal (GI)de un paciente que comprende:
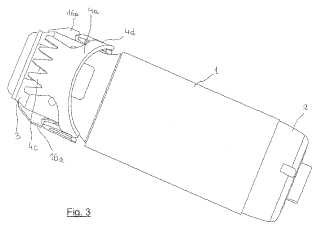
- un cuerpo de la cápsula (1) con una parte frontal (3);
- una pinza quirúrgica (4) montada de forma que se puede liberar en la superficie exterior de la parte frontal dedicho cuerpo de la cápsula;
- medios de locomoción y dirección sin hilos (28) montados en dicho cuerpo de la cápsula;
- medios de detección de imágenes 38 montados en dicho cuerpo de la cápsula para tomar imágenes del tractogastrointestinal y ayudar en la dirección de la cápsula hasta el lugar objetivo;
- un conjunto de transmisor receptor 39 para la transmisión de las imágenes detectadas a un conjunto deprocesamiento de datos externo al paciente y para recibir señales de control desde un operario;
- medios de retención y liberación de la pinza (5) para retener la pinza en la superficie exterior de dicha partefrontal del cuerpo de la cápsula cuando la cápsula es movida a través del tracto gastrointestinal, dichos mediosde retención y liberación de la cápsula colocados en la superficie exterior de la parte frontal del cuerpo de lacápsula y siendo accionables sin hilos para la liberación del mismo cuando la cápsula está cerca del lugarquirúrgico objetivo y está dirigida hacia dicho lugar.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425604.
Solicitante: SCUOLA SUPERIORE DI STUDI UNIVERSITARI E DI PERFEZIONAMENTO SANT'ANNA.
Nacionalidad solicitante: Italia.
Dirección: PIAZZA MARTIRI DELLA LIBERTA, 33 56125 PISA ITALIA.
Inventor/es: DARIO, PAOLO, Menciassi,Arianna, HO,Chi-Nghia, VALDASTRI,PIETRO, QUAGLIA,CLAUDIO, ANHOECK,GUNNAR, SCHOSTEK,SEBASTIAN, RIEBER,FABIAN, SCHURR,MARC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B1/04 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › combinados con dispositivos fotográficos o de televisión.
- A61B17/00 A61B […] › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B17/128 A61B […] › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › para aplicar o quitar clamps o pinzas.
PDF original: ES-2401166_T3.pdf
Fragmento de la descripción:
Cápsula sin hilos que libera una pinza quirúrgica La presente invención se refiere globalmente a un dispositivo médico sin hilos para comprimir un tejido del cuerpo para evitar hemorragias, el tratamiento de una lesión y el marcado de una presunta área del tejido en un lugar quirúrgico dentro del tracto gastrointestinal (GI) . Más específicamente la invención se refiere a un dispositivo capsular sin hilos para la entrega de una pinza quirúrgica en un lugar seleccionado del tracto gastrointestinal.
El documento US 6428548 revela una pinza quirúrgica y un sistema para la entrega de la pinza de un modo controlado en un lugar quirúrgico. Este sistema está pensado para utilizarlo en una variedad de procedimientos médicos, incluyendo el cierre de una perforación de un órgano desde el interior de un lumen mediante la aproximación y la compresión de los bordes de la herida del tejido perforado. El sistema se representa en las figuras 1 y 2 y comprende un dispositivo endoscópico con un capuchón de endoscopio en su extremo distante y una pinza dispuesta de forma que se pueda extraer en la superficie exterior del capuchón de endoscopio. La pinza quirúrgica está formada por un par de superficies de agarre semicirculares conectadas elásticamente, o mordazas, provistas de partes dentadas encaradas unas a otras. Cuando la pinza se monta en el capuchón de endoscopio, la pinza está en su posición abierta, o de recepción del tejido, con las partes dentadas separadas entre ellas y forzando elásticamente sobre la superficie exterior del capuchón. Una vez la pinza es liberada bajo la acción de un dispositivo de despliegue, se cierra hacia su posición de agarre del tejido, en la cual las partes dentadas de las mordazas están cerca unas de otras para agarrar el tejido y ayudar en la retención del mismo entre las dos mordazas.
Las dos mordazas están elásticamente conectadas mediante juntas respectivas que desvían las mordazas una hacia la otra proporcionando la fuerza de compresión requerida para permitir que las mordazas compriman y retengan el tejido entre ellas.
En utilización, la pinza quirúrgica es desplegada fuera del capuchón de endoscopio después de que haya sido colocada adyacente al lugar de la herida. El dispositivo de despliegue asociado con la pinza quirúrgica puede ser del tipo que incluye un cable que forma bucle alrededor de una parte de la pinza y accionado por el operario, para tirar hacia delante la pinza y desplegarla fuera del capuchón de endoscopio, o del tipo que incluye un elemento tubular montado de forma móvil en el endoscopio y accionado por el operario para empujar la pinza desde el lado inferior y desplegarla fuera del capuchón de endoscopio.
Como cualquier procedimiento endoscópico, la utilización del sistema para la entrega de una pinza quirúrgica de un modo controlado en un lugar quirúrgico según el documento US 6428548 comporta que el dispensador de la pinza, tanto un endoscopio flexible como otro dispositivo tubular, sea introducido en el cuerpo del paciente a través de un orificio del cuerpo y esto generalmente causa un serio malestar y dolor en el paciente, el cual a menudo se desanima en cuanto a someterse a este tipo de procedimientos de tratamiento. Adicionalmente, cuando se utiliza un endoscopio convencional, aunque del tipo flexible, puede ser muy difícil y a menudo imposible dispensar la pinza quirúrgica a algunos segmentos del tracto gastrointestinal, por ejemplo el intestino delgado.
Son también conocidos los procedimientos endoscópicos sin hilos para la exploración de diagnóstico sin dolor del tracto gastrointestinal. El procedimiento requiere que un paciente ingiera una cápsula del tamaño de una píldora de vitaminas la cual es transportada por peristalsis a través del tracto digestivo. Durante el tránsito la cápsula toma imágenes las cuales son transmitidas a una matriz de antenas colocadas exteriormente en el abdomen del paciente y registradas en un conjunto de almacenaje portátil unido a un cinturón alrededor de la cintura del paciente. La adquisición de imágenes lleva ocho horas y durante este tiempo los pacientes son libres de llevar a cabo sus actividades diarias. El dispositivo es expulsado naturalmente después de aproximadamente 24 horas, si no aparecen complicaciones. Entonces el paciente vuelve a la consulta del médico para entregar la cápsula y el equipo asociado para descargar las imágenes en la estación de trabajo del médico para la revisión y el análisis.
Una cápsula endoscópica para un procedimiento endoscópico sin hilos, como se describe por ejemplo en el documento US 5604531, comprende un cuerpo de la cápsula, una ventana de visión en el cuerpo de la cápsula y una fuente de luz tal como un diodo emisor de luz (LED) para iluminar las partes interiores del sistema digestivo, un sensor de imágenes para tomar imágenes y un sistema de enfoque, un transmisor, una fuente de energía y un conjunto de procesamiento de datos el cual genera datos de seguimiento y de vídeo a partir del flujo de datos individuales. Una cápsula comercial según esta patente es la cápsula PillCam® comercializada en los Estados Unidos por InScope, una división de Johnson & Johnson subsidiaria de Ethicon Endo-Surger y , para la visualización de la mucosa del intestino delgado, el colón y el esófago. Un dispositivo similar es fabricado por Olympus Corporation y comercializado bajo el nombre de EndoCapsule para el intestino delgado.
Las cápsulas endoscópicas del tipo mencionado antes en este documento se mueven pasivamente a través del tracto gastrointestinal y por lo tanto sus movimientos no pueden ser controlados. También las cápsulas endoscópicas autopropulsadas y remotamente controladas han sido reveladas. Por ejemplo el documento WO 2005122866 revela la aplicación de fuerzas magnéticas a imanes permanentes en la cápsula para mover, girar y detener la cápsula en el tracto digestivo. El documento US 2006030754 revela un sistema de control activo para una cápsula endoscópica que comprende un motor que consiste en un conjunto de estator electromagnético y un conjunto de rotor magnetizado permanentemente, en particular en forma de palas unidas a un eje giratorio. La fuente de energía interna puede recibir energía desde fuentes de energía ultrasónicas externas, fuentes de ondas electromagnéticas o fuentes magnéticas. El documento EP 1715789 revela un sistema de locomoción activo para una cápsula endoscópica obtenido por medio de un conjunto de patas retráctiles en aleaciones con memoria de forma SMA súper elásticas alojadas en ranuras axiales del cuerpo de la cápsula. Cada pata tiene un grado de libertad activo (DOF) , para permitir el giro de la pata entera alrededor de un punto de articulación para abrir y cerrar radialmente cada pata, y un grado de libertad pasivo para doblar la pata alrededor de una parte intermedia para adaptarla a la capacidad de deformación del tejido del tracto intestinal.
Las cápsulas endoscópicas del tipo anteriormente mencionado no tienen la capacidad de tratamiento terapéutico debido al limitado espacio en la cápsula. Para permitir una capacidad de tratamiento terapéutico, la cápsula debe estar equipada con componentes mecánicos o electrónicos adicionales, los cuales alargarían la cápsula hasta un tamaño intragable. Además, incluso aunque la cápsula se mantuviera en un tamaño que se pueda tragar, el suministro de energía para un mecanismo terapéutico de este tipo debería estar asegurado, lo cual requeriría que estuviera previsto más espacio para los medios de almacenaje de energía.
El documento US 2005/0273139 revela una cápsula que se puede tragar móvil en el tracto gastrointestinal y que transporta un dispositivo de pinzado del tejido. El dispositivo comprende una pinza y un conjunto de accionamiento para proporcionar a la pinza un movimiento de avance y de retracción hacia/desde una ubicación previamente definida del tracto gastrointestinal.
En la cápsula según este documento el dispositivo de pinzado del tejido está dispuesto en el interior de la cápsula y la pinza se prolonga hacia fuera desde un extremo del cuerpo de la cápsula después de que la cápsula llega cerca de la ubicación seleccionada.
El objeto general de la presente invención es proporcionar la capacidad de tratamiento terapéutico capsular sin hilos con mecanismos de tratamiento que consuman menos energía.
Otro objeto de la presente invención es proporcionar una cápsula sin hilos capaz de moverse en el tracto gastrointestinal para la entrega de una pinza quirúrgica en un lugar gastrointestinal sin la necesidad de que sean introducidos dispositivos endoscópicos tubulares en el cuerpo del paciente a través de un orificio del cuerpo.
Con objeto adicional... [Seguir leyendo]
Reivindicaciones:
1. Una cápsula sin hilos para la entrega de una pinza quirúrgica en un lugar objetivo en el tracto gastrointestinal (GI) de un paciente que comprende:
-un cuerpo de la cápsula (1) con una parte frontal (3) ;
-una pinza quirúrgica (4) montada de forma que se puede liberar en la superficie exterior de la parte frontal de dicho cuerpo de la cápsula;
-medios de locomoción y dirección sin hilos (28) montados en dicho cuerpo de la cápsula;
-medios de detección de imágenes 38 montados en dicho cuerpo de la cápsula para tomar imágenes del tracto gastrointestinal y ayudar en la dirección de la cápsula hasta el lugar objetivo;
-un conjunto de transmisor receptor 39 para la transmisión de las imágenes detectadas a un conjunto de procesamiento de datos externo al paciente y para recibir señales de control desde un operario;
-medios de retención y liberación de la pinza (5) para retener la pinza en la superficie exterior de dicha parte frontal del cuerpo de la cápsula cuando la cápsula es movida a través del tracto gastrointestinal, dichos medios de retención y liberación de la cápsula colocados en la superficie exterior de la parte frontal del cuerpo de la cápsula y siendo accionables sin hilos para la liberación del mismo cuando la cápsula está cerca del lugar quirúrgico objetivo y está dirigida hacia dicho lugar.
2. La cápsula sin hilos según la reivindicación 1 en la que dichos medios de retención y liberación de la pinza comprenden topes retráctiles (15, 16, 30, 40, 50) que se prolongan desde la superficie exterior de la parte frontal de dicho cuerpo de la cápsula antes de dicha pinza (4) , los cuales se apoyan de forzadamente contra dichos topes, un mecanismo de liberación motorizado (5) estando provisto en el interior de dicho cuerpo de la cápsula para la retracción de dichos topes, en el que la pinza es liberada para agarrar el tejido en el lugar objetivo axialmente encarado a la cápsula.
3. La cápsula sin hilos según la reivindicación 2 en la que dicho mecanismo de liberación comprende una corredera (11, 31) y un motor (23, 34) para mover parcialmente dicha corredera, la corredera estando conectada a dichos topes (15, 16, 30) de tal modo que su deslizamiento axial causa que los topes se retraigan desde dicha superficie exterior.
4. La cápsula sin hilos según la reivindicación 3 en la que dichos topes son en forma de extensiones sustancialmente conformadas en gancho (15a, 16a) de por lo menos un par de placas (15b, 16b) articuladamente montadas en el interior de la parte frontal de dicho cuerpo de la cápsula, dichas placas estando articuladamente conectadas a brazos respectivos (13, 14) en un punto de conexión (21, 22) colocado en un lado diametralmente opuesto de dichas extensiones, dicha corredera (11) estando articuladamente conectada a dichos brazos (13, 14) y a una segunda palanca (9) , la cual, a su vez, está articuladamente conectada a una primera palanca (6) articuladamente conectada a un pasador (8) fijado a dicho cuerpo de la cápsula y perpendicular al eje longitudinal (A) de la cápsula, dichas palancas primera y segunda (6, 9) estando parcialmente alineadas cuando dichas extensiones en forma de ganchos (15a, 16a) se prolongan desde la superficie exterior de la parte frontal del cuerpo de la cápsula, una leva (26) accionada por dicho motor estando provista en un lado de dicha primera y segunda palanca, el perfil de la leva siendo de tal tipo que un desplazamiento angular de la leva causa que se ejerza una fuerza de empuje en dichas palancas en una dirección perpendicular a su eje de articulación común, por lo que las palancas primera y segunda se desalinean y la corredera es movida a lo largo de dicho eje longitudinal (A) , retrayendo de ese modo dichas extensiones en forma de gancho.
5. La cápsula sin hilos según la reivindicación 4 en la que la leva (26) está colocada cerca del eje de articulación común de dicha primera y segunda palanca (6, 9) .
6. La cápsula sin hilos según la reivindicación 3 en la que dichos topes comprenden un par de pasadores (30) que se extienden en lados diametralmente opuestos de la parte frontal de dicho cuerpo de la cápsula, dicha corredera siendo una placa (31) sustancialmente paralela a dichos pasadores y estando formada con dos muescas simétricamente inclinadas (32) con relación al eje longitudinal (A) de la cápsula deslizante mente acopladas con patas respectivas (33) de dichos pasadores, estando provista una trasmisión de tornillo (35) entre dicho motor
(34) y dicha corredera (31) , por lo que un desplazamiento angular axial del tornillo causa un movimiento axial de dicha corredera, retrayendo de ese modo dichos pasadores.
7. La cápsula sin hilos según la reivindicación 1 en la que dichos medios de retención y liberación de la pinza comprenden topes retráctiles (40, 50) que se prolongan desde la superficie exterior de la parte frontal de dicho cuerpo de la cápsula antes de dicha pinza, la cual se apoya de forzadamente contra dichos topes, estando
provistos medios en el interior de dicho cuerpo de la cápsula para la retracción de los topes, de tal modo que la pinza es liberada para agarrar el tejido en el lugar objetivo axialmente encarado a la cápsula.
8. La cápsula sin hilos según la reivindicación 7 en la que dichos topes retráctiles comprenden por lo menos un par de cuerpos (40) de aleaciones con memoria de forma (SMA) y dichos medios de retracción son un circuito de suministro de energía eléctrica conectado a dichos cuerpos de aleación con memoria de forma, por lo que, cuando se aplica a una tensión a dichos cuerpos de aleación con memoria de forma, ocurre una repentina reducción del tamaño de los cuerpos de aleación con memoria de forma y la pinza se libera.
9. La cápsula sin hilos según la reivindicación 7 en la que dichos topes retráctiles comprenden por lo menos un par de burbujas (50) llenas de un fluido y conectadas hidráulicamente a una cámara (52) , cuyo volumen puede ser variado por el movimiento de un pistón (53) movido por un accionamiento (54) , por lo que un incremento del volumen de dicha cámara corresponde a una acción de succión en dichas burbujas las cuales se comprimen debido a su vaciado, causando de ese modo la liberación de la pinza.
10. La cápsula sin hilos según la reivindicación 1 en la que dichos medios de retención y liberación de la pinza comprenden medios de empuje (60, 70, 80) para el deslizamiento axialmente de la pinza sobre la superficie exterior de la parte frontal del cuerpo de la cápsula hasta que el borde delantero de dicha parte frontal es alcanzado para liberar dicha pinza.
11. La cápsula sin hilos según la reivindicación 10 en la que dichos medios de empuje comprenden una superficie que se puede extender hacia fuera (60) de dicha parte frontal del cuerpo de la cápsula y un elemento de empuje
(61) que actúa desde dentro en la superficie lateral para la elevación hacia fuera de dicha superficie, dicho elemento de empuje estando colocado detrás de la pinza, de modo que, cuando la superficie exterior (60) es elevada, el plano de soporte de la pinza se inclina para causar que la pinza sea liberada rápidamente.
12. La cápsula sin hilos según la reivindicación 10 en la que dichos medios de empuje comprenden un casquillo o anillo (70) coaxialmente móvil en el lado trasero de dicha pinza en la superficie exterior de dicha parte frontal del cuerpo de la cápsula, dicho casquillo o anillo siendo movido por medios de motor colocados a bordo de dicha cápsula.
13. La cápsula sin hilos según cualquiera de las reivindicaciones anteriores adicionalmente comprendiendo medios de manipulación del tejido para sostener o extraer el tejido para ser agarrado por la pinza antes de que sea disparada la pinza.
14. La cápsula sin hilos según la reivindicación 13 en la que dichos medios de manipulación del tejido comprenden un aspirador o una placa adhesiva o medios de gancho/tornillo (80) para la fijación de la cápsula al lugar objetivo antes de que la pinza sea liberada.
(Técnica anterior)
(Técnica anterior)
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]