Aparato y procedimiento para determinar una coincidencia entre una posición y una posición de referencia.
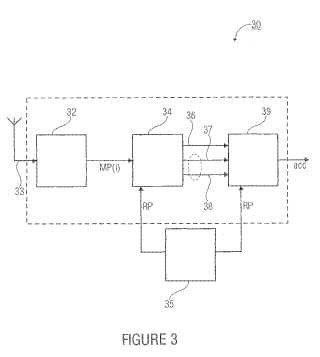
Aparato (30) para determinar una coincidencia de una posición con una posición de referencia,
en el que unas señales de radio desde transmisores de radio posicionados de forma fija pueden ser recibidas en la posición, que comprende:
medios (32) para proporcionar propiedades (MP(i)) de las señales de radio de los transmisores de radio posicionados de forma fija en la posición, en el que las propiedades proporcionadas de las señales de radio incluyen identificaciones de transmisores que identifican a los transmisores de radio;
medios (34) para separar transmisores de radio en un primer número (Neq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia son idénticas a identificaciones de transmisores proporcionadas en la posición, y en un segundo número (Nneq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia e identificaciones de transmisores proporcionadas en la posición son diferentes, en el que los medios (34) para separar están configurados para seleccionar, a partir del segundo número (Nneq) de transmisores de radio, un número (Nnh) de transmisores de radio no recibidos en la posición, cuyas identificaciones de transmisores están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores no están proporcionadas en la posición, o un número (Nhtm) de transmisores de radio recibidos de más en la posición, cuyas identificaciones de transmisores no están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores están 20 proporcionadas en la posición; y
medios (39) para determinar una medida de coincidencia para la posición a partir de las propiedades proporcionadas (MP (i)) de las señales de radio, en el que ambas propiedades (36) del primer número (Neq) de transmisores de radio y propiedades (37; 38) del segundo número (Nneq) de transmisores de radio se consideran en la determinación de una medida de coincidencia, y en el que las propiedades del primer número de transmisores de radio y las propiedades del segundo número de transmisores de radio entran la medida de coincidencia de manera diferente, en el que los medios (39) para determinar están configurados para asociar un valor malus (Mnh,m()) con los transmisores de radio no recibidos en la posición, o un valor malus (Mhtm,r()) con los transmisores de radio recibidos de más en la posición.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/011037.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: MULLER, FRANK, MEYER, STEFFEN, HUPP, JURGEN, LOIDL,KARIN, VAUPEL,Thorsten, HAIMERL,STEPHAN, ZAHONYI,RENATA KITTI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
PDF original: ES-2434731_T3.pdf
Fragmento de la descripción:
Aparato y procedimiento para determinar una coincidencia entre una posición y una posición de referencia [0001] La presente invención se refiere a aparatos y procedimientos para determinar una coincidencia entre una posición y una posición de referencia, que por ejemplo puede ser utilizada para la localización o navegación con terminales móviles en una red de comunicación inalámbrica, en particular.
Para encontrar personas con terminales móviles, hay disponibles diversas tecnologías de localización. El sistema probablemente más conocido para la localización y / o navegación al aire libre es el sistema de posicionamiento global con ayuda de satélites (GPS) . Para la localización y / o navegación en el interior de los edificios y / o en un área cubierta, se conocen diversos procedimientos, tales como sistemas de infrarrojos, sistemas de RFID (identificación por radiofrecuencia) o también evaluaciones de la intensidad de campo de redes IEEE
802.11 WLAN (red de área local inalámbrica) . Por el momento, el sistema GPS está disponible de manera fiable sólo para el aire libre. Extensiones más recientes, tales como los receptores de alta sensibilidad o el llamado A-GPS (GPS asistido) representan intentos para hacer que la tecnología también se pueda utilizar dentro de los edificios. Aquí, A-GPS combina el uso del sistema GPS basado en satélite con la recepción de la llamada información de asistencia desde redes de radio móvil celulares. En la actualidad, sin embargo, estas tecnologías no tienen todavía las precisiones medias deseadas. Los sistemas de infrarrojos y sistemas RFID no suelen estar disponibles con una cobertura completa y están sujetos a requisitos específicos.
Debido a la creciente difusión de las redes de radio inalámbricas, por ejemplo basadas en el estándar WLAN, estas redes inalámbricas se prestan a sí mismas como base para nuevos procedimientos de localización.
Los procedimientos de localización comunes utilizados anteriormente se basan en la triangulación, las relaciones de vecindad, de lateración mediante la medida del tiempo de lateración por medio de la evaluación de la intensidad de campo, por ejemplo. Estos procedimientos son procedimientos de localización en los que se deben conocer o bien una posición de transmisores fijos y / o estaciones de base, o en los que el entrenamiento tiene que llevarse a cabo previamente en las posiciones típicas en un ambiente a cubrir por el procedimiento de localización.
En los sistemas de localización basados en WLAN, se suele emplear la llamada toma de huellas de intensidad de la señal recibida (RSS) como procedimiento básico. Este procedimiento se basa en la suposición de que las intensidades de señal de las señales de radio de varias estaciones de radio recibidas y / o que se pueden recibir, en una ubicación actual caracterizan de forma única la ubicación o posición. Si existe una base de datos que contiene, para un número de localizaciones de referencia o posiciones de referencia, identificaciones de estaciones de radio recibidas y / o que se pueden recibir ahí, así como las intensidades de campo de las señales de radio correspondientes, la posición actual se puede inferir a partir de un conjunto de valores de medida actuales (identificaciones de transmisor y valores de intensidad de señal) mediante la realización de coincidencia entre los valores de medida medidos actualmente y los valores de referencia de la base de datos. Para cada punto de referencia, esta coincidencia evalúa la similitud entre sus valores de medida registrados previamente y / o valores de referencia con los valores de medida actuales de la posición actual. El o los puntos de referencia más similares determinan entonces una estimación de la ubicación actual.
Para una base de datos de referencia, la intensidad de la señal se determina experimentalmente en un número suficiente de puntos de medidas de prueba. De este modo, se crea una base de datos que contiene una lista de estaciones de base (puntos de acceso) con la intensidad y calidad de campo de recepción asociados, respectivamente, para cada posición en la que se realizó una medida de prueba. En una implementación de WLAN, una base de datos de referencia como esta puede incluir, por ejemplo, los siguientes parámetros:
RID MAC RSSI PGS X Y Z MAPNR CREADA
1 00.0D.54.9E.17.81 46530 100 5795 15627 150 0 12.03.07 12:42
1 00.0D.54.9E.1A.BA 67260 90 5795 15627 150 0 12.03.07 12:42
1 00.0D.54.9E.1D.64 72002 88 5795 15627 150 0 12.03.07 12:42
1 00.0E.6A.D3.B9.8B 59531 100 5795 15621 150 0 12.03.07 12:42
1 00.0F.A3.10.07.6C 46464 96 5795 15627 150 0 12.03.07 12:42
1 00.0F.A3.10.07.FB 74488 94 5795 15627 150 0 12.03.07 12:42
1 00.0F.A3.10.09.SF 72375 97 5795 15627 150 0 12.03.07 12:42
2 00.0D.54.9E.17.81 54138 100 19399 15451 150 0 12.03.07 12:43
2 00.0D.54.9E.18.1D 76560 11 14399 15451 150 0 12.03.07 12:43
2 00.0D.54.9E.1A.BA 62318 94 14399 15451 150 0 12.03.07 12:43
2 00.0D.54.9E.1D.64 71348 96 14399 15451 150 0 12.03.07 12:43
2 00.0E.6A.D3.B9.8B 45393 100 14399 15451 150 0 12.03.07 12:43
2 00.OF.A3.10.07.6C 66853 96 14399 15451 150 0 12.03.07 12:43
2 00.0F.A3.10.07.FB 72251 100 14399 15451 150 0 12.03.07 12:43
2 00.0F.A3.10.09.5F 70990 90 14399 15451 150 0 12.03.07 12:43
3 00.0D.54.9E.17.81 58291 100 24583 15627 150 0 12.03.07 12:43
3 00.0D.54.9E.18.1D 78610 68 24583 15627 150 0 12.03.07 12:43
3 00.0D.54.9E.1A.BA 62153 98 24583 15627 150 0 12.03.07 12:43
3 00.0D.54.9E.1D.64 64187 90 24583 15627 150 0 12.03.07 12:43
3 00.0E.6A.D3.B9.8B 32851 100 24583 15627 150 0 12.03.07 12:43
3 00.0F.A3.10.07.6C 69006 96 24583 15627 150 0 12.03.07 12:43
3 00.0F.A3.10.07.FB 71749 92 24583 15627 150 0 12.03.07 12:43
3 00.0F.A3.10.09.5F 71482 83 24583 15627 150 0 12.03.07 12:43
3 00.0F.A3.10.09.80 71000 40 24583 15627 150 0 12.03.07 12:43
Por lo tanto, la tabla incluye la siguiente información:
- la identificación del punto de referencia (RID)
- las direcciones MAC de las estaciones recibidas
- las intensidades de campo de recepción de los puntos de acceso s (RSSI; 46560 significa -46.560 dBm)
- la posición en coordenadas métricas cartesianas (x, y, z; 24583 significa 245.83 m) , así como
- el tiempo de captura de valor de medida.
Las señales WLAN, que teóricamente deben ser medidas solamente con una intensidad de campo relativamente baja, presentan un comportamiento relativamente poco fiable con respecto a su carácter "medible" o "no medible". La columna de PGS ("porcentaje visto") indica, en porcentaje, con qué frecuencia se observó esta estación durante la captura del valor medido (es decir, PGS = 90 significa que la estación se midió en 9 de cada 10
medidas, en promedio) . El valor de PGS se determina cuando se forman las posiciones de referencia y / o los paquetes de medidas de referencia para cada transmisor de radio y ha de entenderse como una medida de su fiabilidad. Dentro de una cierta ventana de tiempo de medida, hay un número definido de posibles valores de medida desde un transmisor de radio mediante un intervalo de muestreo fijo de por ejemplo 200 ms. El valor de PGS es un valor en porcentaje de los valores de un transmisor de radio (RSSI) realmente medidos dentro de la ventana de tiempo de medida en relación con los potencialmente posibles. Los puntos de referencia son capturados en una ventana de tiempo más larga (Por ejemplo, de 6 a 10 s) , por ejemplo, cada 200 ms en el caso ideal durante la calibración. A este respecto, la figura 5 muestra un ejemplo de forma de onda de una señal de recepción de un determinado transmisor de radio, que solo puede ser recibida de manera relativamente poco fiable en la posición de medida. En un intervalo de tiempo de medida de 10 s, el transmisor de radio determinado solamente se puede recibir durante unos 3 s, lo que da un valor PGS de aproximadamente 30% para este transmisor de radio.
Para la localización, los valores de medición actualmente capturados se comparan con la base de datos. El más similar o una integración de los valores de referencia más similares se aceptan como posición actual. Son posibles varios procedimientos para la correspondencia; el más ampliamente utilizado es el de menor distancia en el
espacio de la señal.
La toma de huellas digitales RSS proporciona buenos resultados en las zonas de interior y al aire libre. Debido a que no es necesario conocer las ubicaciones de configuración de los transmisores de radio estacionarios, el procedimiento... [Seguir leyendo]
Reivindicaciones:
1. Aparato (30) para determinar una coincidencia de una posición con una posición de referencia, en el que unas señales de radio desde transmisores de radio posicionados de forma fija pueden ser recibidas en la posición, que comprende:
medios (32) para proporcionar propiedades (MP (i) ) de las señales de radio de los transmisores de radio posicionados de forma fija en la posición, en el que las propiedades proporcionadas de las señales de radio incluyen identificaciones de transmisores que identifican a los transmisores de radio; medios (34) para separar transmisores de radio en un primer número (Neq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia son idénticas a identificaciones de transmisores proporcionadas en la posición, y en un segundo número (Nneq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia e identificaciones de transmisores proporcionadas en la posición son diferentes, en el que los medios (34) para separar están configurados para seleccionar, a partir del segundo número (Nneq) de transmisores de radio, un número (Nnh) de transmisores de radio no recibidos en la posición, cuyas identificaciones de transmisores están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores no están proporcionadas en la posición, o un número (Nhtm) de transmisores de radio recibidos de más en la posición, cuyas identificaciones de transmisores no están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores están proporcionadas en la posición; y medios (39) para determinar una medida de coincidencia para la posición a partir de las propiedades proporcionadas (MP (i) ) de las señales de radio, en el que ambas propiedades (36) del primer número (Neq) de transmisores de radio y propiedades (37; 38) del segundo número (Nneq) de transmisores de radio se consideran en la determinación de una medida de coincidencia, y en el que las propiedades del primer número de transmisores de radio y las propiedades del segundo número de transmisores de radio entran la medida de coincidencia de manera diferente, en el que los medios (39) para determinar están configurados para asociar un valor malus (Mnh, m () ) con los transmisores de radio no recibidos en la posición, o un valor malus (Mhtm, r () ) con los transmisores de radio recibidos de más en la posición.
2. Aparato según la reivindicación 1, en el que las propiedades (36) del primer número (Neq) de transmisores de radio están ponderadas más fuertemente que las propiedades (37; 38) del segundo número (Nneq) de transmisores de radio.
3. Aparato según cualquiera de las reivindicaciones 1 a 2, en el que las propiedades (MP (i) ) de las señales de radio comprenden propiedades electromagnéticas de las señales de radio.
4. Aparato según la reivindicación 3, en el que los medios (39) para determinar están configurados para determinar la medida de coincidencia para la posición a partir de diferencias (LRSSIn) entre propiedades electromagnéticas previamente grabadas en la posición de referencia y las propiedades electromagnéticas proporcionadas en la posición del primer número (Neq) de transmisores de radio.
5. Aparato según la reivindicación 4, en el que los medios (39) para determinar están configurados para asociar una mayor medida de coincidencia con la posición, cuanto menor es la suma de las diferencias (LRSSIn) es
6. Aparato según una de las reivindicaciones anteriores, en el que los medios (32) para proporcionar las propiedades (MP (i) ) de las señales de radio están configurados para proporcionar propiedades de las señales de radio en la posición relativas a la la intensidad de campo de recepción.
7. Aparato según la reivindicación 6, en el que los medios (32) para proporcionar las propiedades (MP (i) ) de las señales de radio están configurados para proporcionar un valor RSSI, un espectro de potencias de recepción, o una relación de potencia señal-ruido de las señales de radio en la posición.
8. Aparato según una de las reivindicaciones anteriores, en el que los medios (39) para determinar están configurados para asociar el valor malus (Mnh, m () ) con un transmisor de radio recibido demasiado poco en la posición, en función de la fiabilidad con la cual el transmisor de radio podía ser recibido en la posición de referencia en el pasado.
9. Aparato según una de las reivindicaciones anteriores, en el que los medios (39) para determinar están configurados para asociar el valor malus (Mnh, m () ) con un transmisor de radio no recibido en la posición, en función de una propiedad relativa a una intensidad de campo de recepción.
10. Aparato según una de las reivindicaciones anteriores, en el que los medios (39) para determinar están configurados para asociar una mayor medida de coincidencia con la posición, cuanto menor es la suma de los valores malus (LMnh, m () ) de los transmisores de radio no recibidos en la posición.
11. Aparato según una de las reivindicaciones anteriores, en el que los medios (39) para determinar están configurados para asociar el valor malus (Mhtm, r () ) con un transmisor de radio recibido de más en la posición, en función de una propiedad relativa a la intensidad de campo de recepción de su señal de radio.
12. Aparato según una de las reivindicaciones anteriores, en el que los medios (39) para determinar están configurados para asociar una mayor medida de coincidencia con la posición, cuanto menor es la suma de los valores malus (LMhtm, r () ) de los transmisores de radio recibidos de más en la posición.
13. Dispositivo de navegación, que comprende un aparato (30) para determinar una medida de coincidencia de una posición actual con una posición de referencia, según una de las reivindicaciones anteriores; y medios para dar como salida una estimación de la posición actual a partir de la medida de coincidencia determinada.
14. Procedimiento para determinar una coincidencia de una posición con una posición de referencia, en el que unas señales de radio de transmisores de radio posicionados de forma fija pueden ser recibidas en la posición, que comprende:
proporcionar propiedades (MP (i) ) de las señales de radio de los transmisores de radio posicionados de forma fija en la posición, en el que las propiedades proporcionadas de las señales de radio comprenden identificaciones de transmisores que identifican a los transmisores de radio; separar los transmisores de radio en un primer número (Neq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia son idénticas a identificaciones de transmisores proporcionadas en la posición, y en un segundo número (Nneq) de transmisores de radio, cuyas identificaciones de transmisores previamente grabadas en la posición de referencia e identificaciones de transmisores proporcionadas en la posición son diferentes, en el que la separación comprende seleccionar, a partir del segundo número (Nneq) de transmisores de radio, un número (Nnh) de transmisores de radio no recibidos en la posición, cuyas identificaciones de transmisores están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores no están proporcionadas en la posición, o un número (Nhtm) de transmisores de radio recibidos de más en la posición, cuyas identificaciones de transmisores no están grabadas previamente en la posición de referencia, pero cuyas identificaciones de transmisores están proporcionadas en la posición; y determinar una medida de coincidencia para la posición a partir de las propiedades proporcionadas (MP (i) ) de las señales de radio, en el que ambas propiedades (36) del primer número (Neq) de transmisores de radio y propiedades (37; 38) del segundo número (Nneq) de transmisores de radio se consideran en la determinación de una medida de coincidencia, y en el que las propiedades del primer número de transmisores de radio y las propiedades del segundo número de transmisores de radio entran la medida de coincidencia de manera diferente, en el que un valor malus (Mnh, m () ) se asocia a los transmisores de radio no recibidos en la posición o un valor malus (Mhtm, r () ) se asocia a los transmisores de radio recibidos de más en la posición.
15. Programa de ordenador con un código de programa para realizar el procedimiento de localización de una posición según la reivindicación 14, cuando el programa de ordenador se ejecuta en un ordenador.
FIGURA 2
FIGURA 3
FIGURA 4
Patentes similares o relacionadas:
Método y sistema computarizados de seguimiento y advertencia de proximidad para el personal, la planta y el equipo que funcionan tanto por encima como por debajo del suelo o su movimiento entre ellos, del 1 de Julio de 2020, de EMB Safety Helmet Pty Ltd: Un sistema informatizado de advertencia de proximidad y seguimiento de seguridad para el personal , la planta y el equipo […]
CASCO INTELIGENTE PARA MOTOS, del 19 de Junio de 2020, de JURADO SECO, Sacha: 1. Casco inteligente para motos, caracterizado porque está formado por un casco de moto con conectividad, que incorpora un micrófono , auriculares , cámaras de […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
MÉTODO PARA DETERMINAR EL MODO DE TRANSPORTE DE UNA POBLACIÓN A PARTIR DE DATOS DE FACTURACIÓN DE SERVICIOS MÓVILES, del 14 de Mayo de 2020, de UNIVERSIDAD DEL DESARROLLO: La presente invención se relaciona al campo de los sistemas y métodos para procesamiento de datos, más específicamente con métodos de procesamiento de datos con […]
Procedimiento y sistema de geolocalización para el cálculo directo de elementos de desplazamiento, del 13 de Mayo de 2020, de THALES: Procedimiento para determinar la posición de uno o varios objetos susceptibles de desplazarse en una red, estando dotados uno o varios objetos […]
Dispositivo, sistema y procedimiento de lector de etiquetas de datos portátil para identificar la localización de una etiqueta de datos, del 1 de Abril de 2020, de SYMBOL TECHNOLOGIES, LLC: Procedimiento para identificar la localización de una etiqueta de datos portátil, comprendiendo el procedimiento: leer la etiqueta de datos […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]