Aparato de reducción de movimiento de balanceo para un buque.
Un aparado (10) de reducción de movimiento de balanceo para un buque que comprende:
un volante (11) ;
un mecanismo (12) de cardán configurado para soportar giratoriamente dicho volante (11) ;
un motor (13) configurado para girar dicho volante (11) en base a una potencia de accionamiento a suministrar;
un accionador (20) del motor configurado para suministrar la potencia de accionamiento a dicho motor (13);
caracterizado porque comprende un primer y un segundo amortiguadores (15A, 15B) configurados para frenarun movimiento de balanceo de dicho mecanismo (12) de cardán; y
una unidad (40) de seguridad configurada para controlar dicho accionador del motor y detener el suministro dela potencia de accionamiento a dicho motor (13) cuando una temperatura de al menos uno de dichos primer ysegundo amortiguadores (15A, 15B) es igual o mayor que una temperatura predeterminada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10152137.
Solicitante: MITSUBISHI HEAVY INDUSTRIES, LTD..
Nacionalidad solicitante: Japón.
Dirección: 16-5, KONAN 2-CHOME MINATO-KU TOKYO 108-8215 JAPON.
Inventor/es: UMEMURA, KATSUYA, TAKEUCHI,HIROSHI, MAEDA,SADAHIRO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B39/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 39/00 Equipo para reducir cabeceo, balanceo, o movimientos similares indeseados de embarcaciones; Aparatos para indicar la actitud de una embarcación. › que reducen los movimientos del buque por el efecto directo de giróscopos.
PDF original: ES-2412269_T3.pdf
Fragmento de la descripción:
Aparato de reducción de movimiento de balanceo para un buque Antecedentes de la invención 1. Campo de la invención La presente invención se refiere a un aparato de reducción de movimiento de balanceo para un buque tal como un movimiento oscilante, un movimiento de cabeceo y un movimiento de guiñada.
2. Descripción de la técnica relacionada La patente japonesa Nº 3.556.857 desvela un aparato de reducción de movimiento de balanceo para reducir los movimientos oscilante, de cabeceo y guiñada de un buque. El aparato de reducción de movimiento de balanceo incluye un motor, un volante es accionado por el motor, un mecanismo de cardán que contiene el volante , una sección de soporte para soportar de forma móvil el mecanismo de cardán, un amortiguador de fricción para controlar un movimiento del mecanismo de cardán, una fuente de alimentación para suministrar potencia eléctrica al motor, y una sección de control. Cuando el mecanismo de cardán se balancea en un ángulo predeterminado o más, la sección de control controla de tal manera que la fuente de alimentación del motor se detiene para evitar que el aparato de reducción de movimiento de balanceo se dañe debido a que el movimiento del mecanismo de cardán excede una limitación de la memoria descriptiva. El documento US 5628267 desvela un aparato de reducción de movimiento de de balanceo diseñado para superar el sobrecalentamiento de los cojinetes.
Sumario de la invención Un objeto de la presente invención es evitar que un aparato de reducción de movimiento de balanceo para un buque sufra daños.
En un aspecto de la presente invención, un aparato de reducción de movimiento de de balanceo para un buque incluye un volante , un mecanismo de cardán configurado para soportar de manera giratoria el volante , un motor configurado para girar el volante en base a una potencia de accionamiento que debe suministrarse; y un accionador del motor configurado para suministrar la potencia de accionamiento al motor. Una sección de amortiguación se configura para frenar un movimiento de balanceo del mecanismo de cardán. Una unidad de seguridad controla el accionador del motor para detener el suministro de la potencia de accionamiento al motor cuando una temperatura de la sección de amortiguación es igual a o mayor que una temperatura predeterminada.
De acuerdo con la presente invención, se evita el daño de un aparato de reducción de movimiento de balanceo para un buque.
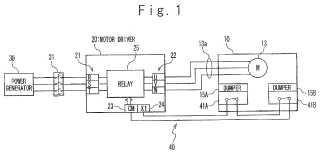
Breve descripción de los dibujos La Figura 1 es un diagrama que muestra esquemáticamente un aparato de reducción de movimiento de balanceo para un buque de acuerdo con una primera realización de la presente invención;
La Figura 2 es una vista en sección transversal del cuerpo del aparato de reducción de movimiento de balanceo; y
La Figura 3 es un diagrama que muestra esquemáticamente el aparato de reducción de movimiento de balanceo de acuerdo con una segunda realización de la presente invención.
Descripción de las realizaciones En lo que sigue, un aparato de reducción de movimiento de balanceo para un buque de acuerdo con la presente invención se describirá con referencia a los dibujos adjuntos.
[Primera realización]
Como se muestra en la Figura 1, un aparato de reducción de movimiento de balanceo de acuerdo con una primera realización de la presente invención incluye un cuerpo 10 del aparato de reducción de movimiento de balanceo, un accionador 20 del motor, un generador 30, y una unidad 40 de seguridad. El cuerpo 10 del aparato de reducción de movimiento de balanceo incluye un motor 13, un amortiguador 15A, y un amortiguador 15B. El generador 30 y el motor 13 son un generador trifásico y un motor trifásico, respectivamente. El accionador 20 del motor incluye un terminal 21 de entrada, un terminal 22 de salida, un terminal 23 CM, un terminal 24 X1, y un relé 25. El terminal 21 de entrada incluye un terminal R, un terminal S, y un terminal T. El terminal 22 de salida incluye un terminal U, un terminal V, y un terminal W. El relé 25 se dispone entre el terminal 21 de entrada y el terminal 22 de salida. El relé 25 abre y cierra una conexión entre el terminal R y el terminal U, una conexión entre el terminal S y el terminal V, y una conexión entre el terminal T y el terminal W. El terminal 21 de entrada se conecta al generador 30 a través de un interruptor 31. El terminal 22 de salida se conecta a un cable 13a de potencia del motor 13.
La unidad 40 de seguridad incluye un interruptor 41A bimetálico proporcionado para el amortiguador 15A y un interruptor 41B bimetálico proporcionado para el amortiguador 15B. Los interruptores 41A y 41B bimetálicos están en un estado cerrado inicialmente, y controlan las temperaturas de los amortiguadores 15A y 15B, respectivamente. El interruptor 41A bimetálico se abre para establecer un estado APAGADO cuando una temperatura del amortiguador 15A aumenta a una temperatura igual a o mayor que temperatura predeterminada. El interruptor 41B bimetálico se abre para establecer un estado APAGADO cuando la temperatura del amortiguador 15B aumenta a una temperatura igual a o mayor que una temperatura predeterminada. El terminal 23 CM se conecta al terminal 24 X1 a través de los interruptores 41A y 41B bimetálicos. Dado que los interruptores 41A y 41B bimetálicos se conectan entre sí en serie, la conexión entre el terminal 23 CM y el terminal 24 X1 está en un estado ENCENDIDO (un estado de conducción) cuando ambos de los interruptores 41A y 41B bimetálicos se cierran, y la conexión entre el terminal 23 CM y el terminal 24 X1 está en un estado APAGADO (un estado de no conducción) cuando al menos uno de los interruptores 41A y 41B bimetálicos se abre.
El relé 25 gira la conexión entre el terminal 21 de entrada y el terminal 22 de salida para estar en el estado ENCENDIDO (cierra la conexión entre el terminal 21 de entrada y el terminal 22 de salida) cuando la conexión entre el terminal 23 CM y el terminal 24 X1 está en el estado ENCENDIDO. También, el relé 25 gira la conexión entre el terminal 21 de entrada y el terminal 22 de salida para estar en el estado APAGADO (abre la conexión entre el terminal 21 de entrada y el terminal 22 de salida) cuando la conexión entre el terminal 23 CM y el terminal 24 X1 está en el estado APAGADO.
El accionador 20 del motor suministra una potencia de accionamiento al motor 13 cuando el relé 25 mantiene la conexión entre el terminal 21 de entrada y el terminal 22 de salida en el estado ENCENDIDO, y detiene el suministro de la potencia de accionamiento cuando el relé 25 gira la conexión entre el terminal 21 de entrada y el terminal 22 de salida para estar en el estado APAGADO.
Como se muestra en la Figura 2, el cuerpo 10 del aparato de reducción de movimiento de balanceo incluye el volante 11 , el mecanismo 12 de cardán, el motor 13, una sección 14 de soporte del mecanismo de cardán y los amortiguadores 15A y 15B. El mecanismo 12 de cardán soporta el volante 11 , de manera que el volante 11 puede girar alrededor de un eje S1 de giro. El motor 13 acciona el volante 11 . La sección 14 de soporte del mecanismo de cardán soporta el mecanismo 12 de cardán de modo que el mecanismo 12 de cardán puede pivotar alrededor de un eje S2 de balanceo. Cada uno de los amortiguadores 15A y 15B frena el movimiento de balanceo del mecanismo 12 de cardán con una resistencia a los fluidos de un aceite hidráulico. Por ejemplo, los amortiguadores 15A y 15B son amortiguadores giratorios. El eje S2 de balanceo es ortogonal al eje S1 de giro. La sección 14 de soporte del mecanismo de cardán se fija a un casco. Los interruptores 41A y 41B bimetálicos se fijan a los lados externos de los amortiguadores 15A y 15B, respectivamente.
Un principio de que el aparato de reducción de movimiento de balanceo de acuerdo con la presente realización reduce el movimiento de balanceo de un buque se describirá ejemplificando un caso en el que un eje de dirección izquierdo o derecho (eje de cabeceo) del casco es paralelo al eje S2 de balanceo. El volante 11 se acciona por el motor 13 a una velocidad alta para tener momento H angular. Cuando el casco recibe una ola en una dirección de un eje de balanceo para balancearse a una velocidad Q angular, un par de giro T1 representado por un producto exterior del momento H angular y la velocidad Ω angular actúa en el mecanismo 12 de cardán, y el mecanismo 12 de cardán se balancea alrededor del eje S2 de balanceo. En este momento, dado que el volante 11 trabaja para mantener el momento H angular, un par T2 inverso actúa en el casco a través de la sección 14 de soporte del mecanismo de cardán. Cuando una velocidad angular del movimiento de balanceo del mecanismo 12 de cardán es ω, el par T2 inverso se representa por un... [Seguir leyendo]
Reivindicaciones:
1. Un aparado (10) de reducción de movimiento de balanceo para un buque que comprende:
un volante (11) ; un mecanismo (12) de cardán configurado para soportar giratoriamente dicho volante (11) ; un motor (13) configurado para girar dicho volante (11) en base a una potencia de accionamiento a suministrar; un accionador (20) del motor configurado para suministrar la potencia de accionamiento a dicho motor (13) ; caracterizado porque comprende un primer y un segundo amortiguadores (15A, 15B) configurados para frenar un movimiento de balanceo de dicho mecanismo (12) de cardán; y una unidad (40) de seguridad configurada para controlar dicho accionador del motor y detener el suministro de la potencia de accionamiento a dicho motor (13) cuando una temperatura de al menos uno de dichos primer y segundo amortiguadores (15A, 15B) es igual o mayor que una temperatura predeterminada.
2. El aparado de reducción de movimiento de balanceo de acuerdo con la reivindicación 1, en el que dicho accionador del motor comprende un primer y segundo terminales (21, 22) , en el que dicha unidad (40) de seguridad comprende una trayectoria de dicho primer terminal (21) a dicho segundo terminal (22) , y dicho accionador (20) del motor suministra la potencia de accionamiento a dicho motor (13) cuando dicha trayectoria está en un estado ENCENDIDO, y detiene el suministro de la potencia de accionamiento a dicho motor cuando dicha trayectoria está en un estado APAGADO.
3. El aparado de reducción de movimiento de balanceo de acuerdo con la reivindicación 2, en el que dicha unidad (40) de seguridad comprende un primer interruptor (41A) bimetálico proporcionado para dicho primer amortiguador (15A) en dicha trayectoria, y dicha primer interruptor bimetálico establece dicha trayectoria en el estado ENCENDIDO cuando la temperatura de dicho primer amortiguador (15A) es inferior a la temperatura predeterminada y establece dicha trayectoria en el estado APAGADO cuando la temperatura de dicho primer amortiguador (15A) es igual o mayor que la temperatura predeterminada.
4. El aparado de reducción de movimiento de balanceo de acuerdo con la reivindicación 3, en el que dicha unidad (40) de seguridad comprende además un segundo interruptor (41B) bimetálico proporcionado para dicho segundo amortiguador (15B) en dicha trayectoria y conectado con dicho primer interruptor (15A) bimetálico en serie, y dicho segundo interruptor (41B) bimetálico establece dicha trayectoria en el estado ENCENDIDO cuando la temperatura de dicho segundo amortiguador (15B) es inferior a la temperatura predeterminada y establece dicha trayectoria en el estado APAGADO cuando la temperatura de dicho segundo amortiguador (15B) es igual o mayor que la temperatura predeterminada.
5. El aparado de reducción de movimiento de balanceo de acuerdo con la reivindicación 2, en el que dicha unidad (40) de seguridad comprende además:
primer y segundo sensores (51A, 51B) de temperatura proporcionados para dichos primer y segundo amortiguadores (15A, 15B) para detectar las temperaturas de dichos primer y segundo amortiguadores (15A, 15B) , respectivamente; y una sección de determinación (52) establece dicha trayectoria en el estado ENCENDIDO, cuando ambas temperaturas detectadas por dichos primer y segundo sensores (51A, 51B) de temperatura son inferiores a la temperatura predeterminada, y establece dicha trayectoria en el estado APAGADO, cuando al menos una de las temperaturas detectadas por dichos primer y segundo sensores (51A, 51B) de temperatura es igual o mayor que la temperatura predeterminada.
Patentes similares o relacionadas:
 Sistema de estabilización de balanceo activo para amortiguar el movimiento de un barco, del 26 de Junio de 2019, de QUANTUM CONTROLS B.V.: Un sistema para amortiguar activamente el movimiento de un barco, que comprende al menos
- un primer elemento (4a, 4b) de estabilización […]
Sistema de estabilización de balanceo activo para amortiguar el movimiento de un barco, del 26 de Junio de 2019, de QUANTUM CONTROLS B.V.: Un sistema para amortiguar activamente el movimiento de un barco, que comprende al menos
- un primer elemento (4a, 4b) de estabilización […]
Embarcación con sistema de suspensión activa, del 19 de Junio de 2019, de Velodyne Robotics, LLC: Una embarcación , que comprende: un casco configurado para flotar en el agua; una cubierta ; un sistema de suspensión situado entre el casco […]
Estabilizador de balance giroscópico para embarcaciones y sistema de control del mismo, del 17 de Junio de 2019, de CALABUIG ALMELA, Emilio: 1. Un estabilizador de balance giroscópico para embarcaciones menores, preferentemente de recreo de una eslora de hasta 24 m. que comprende: Un conjunto […]
Plataforma de alta mar estabilizada por columnas con planchas de atrapamiento de agua y sistema de amarre asimétrico para soporte de turbinas eólicas de alta mar, del 19 de Julio de 2017, de Principle Power, Inc: Un sistema de control de lastre para una plataforma de turbina eólica flotante que tiene una pluralidad de columnas estabilizadoras , teniendo cada columna […]
Un estabilizador giroscópico para embarcaciones, del 22 de Marzo de 2017, de QUICK S.p.A: Un estabilizador giroscópico para embarcaciones, que comprende: un bastidor estacionario que se puede fijar al casco de un navío; un bastidor oscilante […]
Medio de estabilización, del 12 de Marzo de 2014, de TECHNOLOGY INVESTMENT COMPANY PTY LTD: Un medio de estabilización de vehículo que comprende un soporte soportada desde un soporte , un rotor soportado desde el soporte por un par de […]
DISPOSITIVO DE SUPRESION DE OSCILACIONES., del 1 de Marzo de 2005, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un dispositivo de supresión de oscilaciones que comprende: un cuerpo de base que tiene una parte de fijación destinada a ser asegurada […]