Sistema de accionamiento para elementos móviles con movimientos relativos compensados dinámicamente y opuestos.
Sistema de accionamiento de al menos dos elementos ópticos móviles con movimientos relativos de traslacióncompensados dinámicamente y opuestos caracterizado porque comprende,
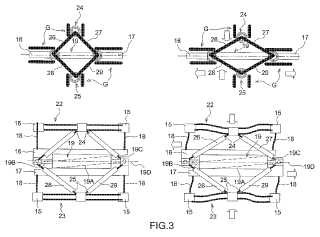
en una estructura rígida (9), al menosdos elementos ópticos móviles, al menos un accionador lineal (19) conectado a un dispositivo de transmisión demovimiento de cuatro brazos rígidos (26 a 29), articulados en sus extremos y que forman un rombo en el que cadauno de los dos primeros vértices opuestos está conectado (20, 21) a un elemento móvil correspondiente (16, 17) ycuyos dos otros vértices opuestos tienen un solo grado de libertad en traslación (24, 25) y están conectados alaccionador, estando cada uno de los dos elementos móviles únicamente conectado a uno de dichos primerosvértices (20, 21).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11153660.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 45, RUE DE VILLIERS 92200 NEUILLY SUR SEINE FRANCIA.
Inventor/es: BAUDASSE,YANNICK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16F15/28 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 15/00 Supresión de las vibraciones en los sistemas (dispositivos de suspensión de los asientos de vehículos B60N 2/50 ); Medios o dispositivos para evitar o reducir las fuerzas de desequilibrio, p. ej. debidas al movimiento (ensayo estático o equilibrado dinámico de máquinas o estructuras G01M 1/00). › Contrapesos; Su fijación o su montaje (para cierres del tipo de rodillo E06B 9/62).
- G02B26/06 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 26/00 Dispositivos o sistemas ópticos que utilizan elementos ópticos móviles o deformables para controlar la intensidad, el color, la fase, la polarización o la dirección de la luz, p. ej. conmutación, apertura de puerta o modulación (elementos móviles de dispositivos de iluminación para el control de la luz F21V; dispositivos o sistemas especialmente adaptados para medir las características de la luz G01J; dispositivos o sistemas cuyo funcionamiento óptico se modifica por el cambio de las propiedades ópticas del medio que constituyen estos dispositivos o sistemas G02F 1/00; control de la luz en general G05D 25/00; control de las fuentes de luz H01S 3/10, H05B 39/00 - H05B 47/00). › para controlar la fase de la luz (G02B 26/08 tiene prioridad).
- G02B7/18 G02B […] › G02B 7/00 Monturas, medios de regulación o uniones estancas a la luz para elementos ópticos. › para prismas; para espejos.
PDF original: ES-2395540_T3.pdf
Fragmento de la descripción:
Sistema de accionamiento para elementos móviles con movimientos relativos compensados dinámicamente y opuestos La presente invención se refiere a un sistema de accionamiento para al menos dos elementos móviles con movimientos relativos compensados dinámicamente y opuestos, sin perturbación del entorno y resistente a las tensiones exteriores.
Una de las aplicaciones principales de los sistemas de accionamiento a los que hace referencia la presente invención se refiere a los mecanismos de tipo “Modulación de Fase” para instrumentos de óptica espaciales, destinados a efectuar ciclos de rotación o de traslación de una “placa moduladora” con incrementos de posición (Modulación de cuatro fases) .
En un instrumento de óptica, de tipo interferómetro, este mecanismo está situado entre la placa separadora y uno de los dos espejos de escala. El ángulo de “tilt” (caso de la rotación) o el desplazamiento lineal (caso de la traslación) de la (o de las) “placa (s) moduladora (s) ” permite modificar la longitud de un trayecto óptico.
En este tipo de mecanismo, el problema técnico reside principalmente en varios puntos:
• Las cargas y momentos deben estar equilibrados y deben permanecer internos al mecanismo, para no perturbar el resto del instrumento.
• En el caso de varias “placas moduladoras”, sus movimientos respectivos deben estar perfectamente sincronizados, a la vez que se limitan en número los accionadores (en el caso de una sola placa óptica, se utiliza un elemento de “contrapeso”) .
• El conjunto, cuando está embarcado a bordo de un vehículo espacial durante la fase de lanzamiento, debe estar “integro”. Es decir, que a pesar de la ausencia de sistema de apilamiento específico, no debe degradarse bajo el efecto de las aceleraciones generadas por el lanzador.
La patente FR 1 374 397 divulga un mecanismo de articulación en forma de rombo para espejo (véase Fig. 7) . El documento D2 divulga un dispositivo interferencial que comprende dos placas prismáticas móviles la una respecto de la otra.
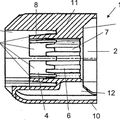
Se ha representado de manera esquemática en la figura 1, un sistema 1 de accionamiento autónomo y no perturbador de control de movimientos de rotación opuestos y sincronizados de dos elementos, una placa óptica 11, y un marco de contrapeso 10 soportados en rotación alrededor de un eje común “O” con la ayuda de un cojinete que incluye los elementos flexibles 12, 13 y similar al cojinete 34 representado en la figura 5, formando parte el conjunto de un instrumento de óptica espacial. Este sistema incluye esencialmente: un marco de soporte 9, dos accionadores 14a, 14b dispuestos para ejercer un par entre los elementos 1 y 11 para orientarlos el uno respecto del otro con un ángulo a . Los accionadores son de tipo piezoeléctrico. El elemento 10 incluye en sus extremos piezas de inercia 10a, 10b destinadas a limitar la masa del conjunto. Se ha delimitado con dos trazos discontinuos T1, T2, los límites del trayecto del haz óptico recibido por el dispositivo 1.
El sistema representado en la figura 2, del tipo con movimientos lineales, incluye: una estructura rígida portadora 9 que soporta dos placas ópticas prismáticas de compensación 10 y 11 mediante láminas metálicas flexibles de guía idénticas 12a, 13a, siendo estas dos placas ópticas prismáticas de compensación 10 y 11 movidas por dos accionadores específicos 14a y 14b. Una placa 13a está representada en la vista de detalle ampliada en la parte de la derecha de la figura 2.
Durante el funcionamiento de un mecanismo lineal de este tipo, para limitar los esfuerzos perturbadores hacia el instrumento, cada puesta en movimiento de un elemento se debe compensar con una carga equivalente en sentido opuesto y sobre un eje que pasa por los centros de gravedad de los elementos en movimiento. Lo mismo ocurre con los mecanismos rotativos donde los centros de gravedad de los elementos en movimiento deben preferentemente situarse sobre un único eje de rotación.
El sistema presentado en la figura 1 propone un actuador específico para motorizar cada elemento, lo cual multiplica el número de componentes. La sincronización de los movimientos se obtiene mediante circuitos electrónicos complejos. La no-convergencia de los vectores de empuje de los actuadores y la desincronización de los movimientos generan dispersiones hacia el instrumento.
El sistema lineal presentado en la figura 2 propone asimismo un actuador específico para motorizar cada uno de los dos elementos. La no-convergencia de los dos vectores de empuje de los actuadores y la sincronización electrónica de los movimientos generan dispersiones hacia el instrumento.
La presente invención tiene por objeto, un sistema de accionamiento para al menos dos elementos móviles con movimientos relativos compensados dinámicamente y opuestos, sin perturbación de los elementos fijados en la misma estructura rígida que el mismo, y que resiste a las tensiones exteriores. Tal sistema debe ser compacto y sin holgura, debe asegurar una sincronización “automática” del movimiento de estos elementos móviles (sin necesidad de mecanismo adicional de sincronización) auto-apilándose (sin necesidad de mecanismo específico de apilamiento) , y muy preciso (precisión tal como la requerida para los instrumentos de óptica) y con una gran vida útil (por ejemplo más de 15 años) .
El primer modo de realización del sistema de accionamiento según la invención es un sistema de accionamiento para al menos dos elementos móviles con movimientos relativos de translación, y se caracteriza porque incluye las características expuestas en la reivindicación 1.
Cuando hay 2n elementos móviles (n>1) , estos se consideran de dos en dos.
El segundo modo de realización del sistema de accionamiento según la invención es un sistema de accionamiento para al menos dos elementos móviles de movimientos relativos de rotación compensados dinámicamente y opuestos, y se caracteriza porque incluye las características expuestas en la reivindicación 5.
Cuando hay 2n elementos móviles (n>1) estos se consideran de dos en dos.
De este modo, el sistema de la invención utiliza una combinación de palancas articuladas que permiten obtener, a partir de un movimiento de entrada lineal, dos movimientos alternativos de sentido opuesto (en rotación o en translación) perfectamente sincronizados. La disposición de estas palancas es tal que permite suprimir los esfuerzos o pares exportados del mecanismo hacia los elementos fijados en la misma estructura rígida que el miso (elementos que incluyen un banco óptico, cuando la aplicación de este sistema se refiere a instrumentos de óptica) . La triangulación de estas palancas es tal que permite, asimismo, llevar las cargas vibratorias del lanzamiento hacia los accionadores iniciadores del movimiento y de este modo evitar el empleo de un mecanismo de apilamiento específico.
La presente invención se entenderá mejor con la descripción detallada de un modo de realización, tomado a título de ejemplo no limitativo e ilustrado mediante el dibujo adjunto, en el cual:
las figuras 1 y 2, ya descritas anteriormente, son esquemas simplificados de dispositivos de accionamiento de la técnica anterior, y las figuras 3 a 7 son esquemas simplificados, esquemas funcionales equivalentes, vistas desde abajo, y vistas detalladas de dispositivos de accionamiento según la invención.
La presente invención se describe en lo sucesivo con referencia a instrumentos ópticos para vehículos espaciales, pero evidentemente no se limita a esta sola aplicación, y puede implementarse en diversas aplicaciones, embarcadas o no, en las cuales hay que aplicar movimientos precisos de traslación o de rotación, oscilatorios o no (estando estos movimientos sincronizados, es decir siendo simétricos respecto de una posición nominal o de reposo de amplitud relativamente baja, por ejemplo de algunas décimas de milímetro o de grado) , a elementos móviles sin perturbar sus dispositivos de soporte, estando estos elementos, en su caso, protegidos contra las aceleraciones bruscas que pudiesen experimentar sus soportes.
Se ha ilustra de manera esquemática en la figura 3, un ejemplo de realización del dispositivo de la invención para dos estados diferentes: en la parte izquierda de la figura, este dispositivo está representado en estado “de reposo”, y en la parte derecha de la figura, está en estado activado del accionador. En cada una de estas dos partes izquierda y derecha de la figura 3, se ha representado en la parte inferior un ejemplo de realización del dispositivo y en la parte... [Seguir leyendo]
Reivindicaciones:
1. Sistema de accionamiento de al menos dos elementos ópticos móviles con movimientos relativos de traslación compensados dinámicamente y opuestos caracterizado porque comprende, en una estructura rígida (9) , al menos dos elementos ópticos móviles, al menos un accionador lineal (19) conectado a un dispositivo de transmisión de movimiento de cuatro brazos rígidos (26 a 29) , articulados en sus extremos y que forman un rombo en el que cada uno de los dos primeros vértices opuestos está conectado (20, 21) a un elemento móvil correspondiente (16, 17) y cuyos dos otros vértices opuestos tienen un solo grado de libertad en traslación (24, 25) y están conectados al accionador, estando cada uno de los dos elementos móviles únicamente conectado a uno de dichos primeros vértices (20, 21) .
2. Sistema según la reivindicación 1, caracterizado porque los elementos ópticos móviles están montados sobre la estructura rígida mediante placas flexibles (18) .
3. Sistema según una de las reivindicaciones anteriores, caracterizado porque el accionador es un accionador piezoeléctrico.
4. Sistema según una de las reivindicaciones anteriores, caracterizado porque los elementos ópticos móviles son placas ópticas y porque está montado a bordo de un vehículo espacial.
5. Sistema de accionamiento de al menos dos elementos ópticos móviles (30, 70) con movimientos relativos de rotación compensados dinámicamente y opuestos, caracterizado porque incluye, en una estructura rígida (9) , al menos dos elementos ópticos móviles, al menos un accionador lineal (31) conectado a un dispositivo de transmisión de movimiento de cuatro brazos rígidos (32, 33; 38, 39) , articulados en sus extremos y que forman un rombo, dos vértices opuestos del rombo que están conectados a los elementos móviles y otros dos vértices opuestos del rombo que están conectados al accionador (31) , estando cada brazo de cada par de brazos opuestos (32, 33 y 38, 39) conectado respectivamente por un lado a un mismo elemento móvil que el otro brazo opuesto del par y por el otro lado al accionador (31) , poniendo cada par de brazos opuestos en movimiento un elemento móvil diferente, correderas (35, 36) que solo tienen un grado de libertad en traslación según un eje longitudinal del accionador (31) , conectando dichas correderas los otros dos vértices opuestos del rombo al accionador (31) , y caracterizado porque los elementos móviles están articulados cada uno en al menos un cojinete (34) .
6. Sistema según la reivindicación 5, caracterizado porque el accionador es un accionador piezoeléctrico.
7. Sistema según una de las reivindicaciones 5 o 6, caracterizado porque los elementos ópticos móviles son placas ópticas y que está montado a bordo de un vehículo espacial.
Patentes similares o relacionadas:
CONTRAPESO PARA GUITARRA, del 23 de Septiembre de 2019, de GARCÍA GARCÍA, Alberto Mauricio: 1. Contrapeso para guitarra caracterizado porque comprende una pieza preferiblemente metálica que dispone de unas ventosas para su fijación y unos […]
PRESURIZADOR DE FLUIDOS ISOBÁRICO, del 27 de Junio de 2019, de ACTIVE FINANCIAL, S.A. DE C.V: Esta invención se refiere a un presurizador de fluidos cuyo diseño permite manipular fluidos a altas temperaturas obteniendo con precisión elevadas presiones, […]
CONTRAPESO PARA LA CUBA DE UNA LAVADORA., del 1 de Mayo de 2007, de ELECTROLUX HOME PRODUCTS CORPORATION N.V.: Contrapeso, conectable a la cuba de una lavadora , que comprende una cáscara hueca con una sección en U que contiene una masa de lastre de […]
MECANISMO DE EQUILIBRADO O CONTRAPESO., del 1 de Diciembre de 2006, de RONFORD-BAKER ENGINEERING COMPANY LTD: Un mecanismo de equilibrado que comprende un soporte para soportar un artículo que ha de ser inclinado alrededor de un eje horizontal; una leva anular móvil con […]
PROCEDIMIENTO PARA LA FABRICACION DE CONTRAPESOS DE ALTA DENSIDAD, del 1 de Septiembre de 2004, de SIC LAZARO, S.L.: Procedimiento para la fabricación de contrapesos de alta densidad que consiste en una mezcla de cemento, cascarilla de laminación o residuos de altos hornos, gravilla, […]
DISPOSITIVO DE COLOCACION ANGULAR DE UNA MASA CON RESPECTO A UN EJE HORIZONTAL DE SOPORTE Y APARATO DE ILUMINACION EQUIPADO CON UN DISPOSITIVO ASI., del 16 de Marzo de 2001, de ALM: ESTE DISPOSITIVO DE POSICIONAMIENTO ANGULAR DE UNA MASA RESPECTO A UN EJE HORIZONTAL DE SOPORTE (O{SUB,1}) COMPRENDE UN BRAZO DE SUJECION DESTINADO A LLEVAR […]
AMORTIGUADOR DE VIBRACIONES., del 1 de Noviembre de 1995, de FORSHEDA AB: AMORTIGUADOR DE VIBRACIONES PARA AMORTIGUAR VIBRACIONES EN UNA SUPERFICIE DE UN OBJETO . EL AMORTIGUADOR ESTA FORMADO POR UN CUERPO […]
 ELEMENTO COMPENSADOR DE EQUILIBRIO, BOMBA Y PROCEDIMIENTO PARA EQUILI BRAR BOMBAS ACCIONADAS POR UN MOTOR ELECTRICO, del 16 de Octubre de 2007, de PIERBURG GMBH: Elemento compensador de desequilibrio para fijar en un extremo de un árbol de un motor o de una bomba, presentando dicho elemento compensador de desequilibrio […]
ELEMENTO COMPENSADOR DE EQUILIBRIO, BOMBA Y PROCEDIMIENTO PARA EQUILI BRAR BOMBAS ACCIONADAS POR UN MOTOR ELECTRICO, del 16 de Octubre de 2007, de PIERBURG GMBH: Elemento compensador de desequilibrio para fijar en un extremo de un árbol de un motor o de una bomba, presentando dicho elemento compensador de desequilibrio […]