Servoaccionamiento con un motor eléctrico y un engranaje planetario.
Servoaccionamiento (1) constituido por un motor eléctrico (2) y un engranaje planetario (3),
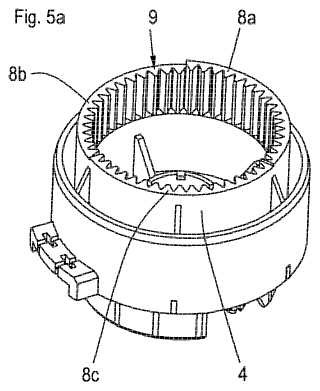
que comprende una rueda internamente dentada (4), un portasatélites (5) y varias ruedas dentadas satélites (6a, 6b, 6c) montadas en el portasatélites (5), en donde las ruedas dentadas satélites (6a, 6b, 6c) presentan en la zona de su dentado exterior una respectiva superficie frontal (7a, 7b, 7c) adelantada en la dirección de ensamble (F) y la rueda internamente dentada (4) presenta en la zona de su dentado interno varias zonas angulares (8a, 8b, 8c) - asociadas a las ruedas dentadas satélites - de su lado frontal (9) dirigido en sentido contrario a la dirección de ensamble (F), en una posición angular definida del portasatélites (5) con respecto a la rueda internamente dentada (4), caracterizado porque la distancia axial (A1) entre la superficie frontal (7a) de la primera rueda dentada satélite (6a) y la primera zona angular (8a) de la rueda internamente dentada (4) asociada a ella se diferencia de la distancia axial (A2) entre la superficie frontal (7b) de la segunda rueda dentada satélite (6b) y la segunda zona angular (8b) de la rueda internamente dentada (4) asociada a ella, y porque ninguna de las zonas angulares (8a, 8b, 8c) del lado frontal (9) de la rueda internamente dentada (4) dirigido en sentido contrario a la dirección de ensamble (F) es parte de un plano (12a, 12b, 12c) al que pertenece una de las otras zonas angulares (8a, 8b, 8c), estando orientados los planos (12a, 12b, 12c) paralelamente uno a otro y en ángulo recto con el eje de simetría del servoaccionamiento.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09012174.
Solicitante: BUHLER MOTOR GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ANNE-FRANK-STRASSE 33-35 90459 NURNBERG ALEMANIA.
Inventor/es: SCHREIBER, THOMAS, Guttenberger,Richard.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H57/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 57/00 Partes constitutivas generales de las transmisiones (de mecanismo husillo-tuerca F16H 25/00; de transmisiones por fluidos F16H 39/00 - F16H 43/00). › Cajas de engranajes; Montaje de las transmisiones en el interior de aquéllas.
- F16H57/08 F16H 57/00 […] › de las transmisiones con órgano de movimiento orbital.
- H02K7/116 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 7/00 Dispositivos para manipular energía mecánica estructuralmente asociados con con máquinas dinamo-eléctricas, p. ej. asociación estructural con un motores mecánico de arrastre o máquinas dinamoeléctrica auxiliares. › con engranajes.
PDF original: ES-2378266_T3.pdf
Fragmento de la descripción:
Servoaccionamiento con un motor eléctrico y un engranaje planetario.
La invención concierne a un servoaccionamiento constituido por un motor eléctrico y un engranaje planetario, que comprende una rueda internamente dentada, un portasatélites y varias ruedas dentadas satélites montadas en el portasatélites, en donde las ruedas dentadas satélites presentan en la zona de su dentado exterior una respectiva superficie frontal adelantada en la dirección de ensamble y la rueda internamente dentada presenta en la zona de su dentado interno varias zonas angulares - asociadas a la ruedas dentadas satélites - de su lado frontal dirigido en sentido contrario a la dirección de ensamble en una posición angular definida del portasatélites con respecto a la rueda internamente dentada, y en donde la distancia axial entre la superficie frontal de la primera rueda dentada satélite y la primera zona angular de la rueda internamente dentada asociada a ella se diferencia de la distancia axial entre la superficie frontal de la primera rueda dentada satélite y la segunda zona angular de la internamente dentada asociada a ella.
Se conoce por el documento EP 0 667 279 A1 un servoaccionamiento constituido por un motor eléctrico y un engranaje planetario. En este servoaccionamiento las ruedas dentadas satélites presentan el mismo espesor y están dispuestas en un plano, y la rueda internamente dentada termina generalmente en un plano paralelo a este plano. Debido a esta geometría, los lados frontales de las ruedas dentadas satélites tropiezan al mismo tiempo con la rueda internamente dentada durante el montaje, con lo que se pueden producir problemas de ensamble.
Se conoce por el documento US 2006/142114 A1 un engranaje planetario de una sola etapa en el que la distancia axial entre la superficie frontal de la primera rueda dentada satélite y la primera zona angular de la rueda internamente dentada asociada a ella se diferencia de la distancia axial entre la superficie frontal de la segunda rueda dentada satélite y la segunda zona angular de la rueda internamente dentada asociada a ella. Gracias a esta medida se pueden ensamblar de manera más sencilla al menos las dos primeras ruedas dentadas satélites.
Los documentos US 5, 800, 305 A1 y US 2005/192151 A1 muestran engranajes planetarios de varias etapas en los que también los lados frontales de las ruedas dentadas satélites presentan distancias axiales diferentes con respecto a la rueda internamente dentada.
En el documento DE 197 29 988 C1 se describe un servoaccionamiento de la clase genérica expuesta, en el que las zonas angulares del lado frontal dirigido en sentido contrario a la dirección de ensamble están dispuestas en un único plano y los lados frontales de las ruedas dentadas satélites que se adelantan en la dirección de ensamble están dispuestos también en un único plano, de modo que las distintas distancias entre los lados frontales de las ruedas dentadas satélites y las zonas angulares de la rueda internamente dentada son iguales en cada paso de montaje y también en la posición de montaje final. Esta disposición geométrica es problemática en el momento del montaje debido a que el dentado de las tres ruedas dentadas satélites engrana al mismo tiempo con el dentado de la rueda internamente dentada. En este caso, se producen frecuentemente problemas de ensamble, ya que las posiciones angulares de las ruedas dentadas satélites entre ellas y con respecto a la rueda internamente dentada no se alinean correctamente en forma automática. Esto conduce al menos a una reducción de la velocidad de montaje. Sin embargo, pueden producirse también daños en el dentado.
Por tanto, el problema de la presente invención consiste en cuidar en un servoaccionamiento de la clase genérica expuesta de que sea posible un montaje sencillo y rápido, económico y temporalmente desacoplado, de las tres ruedas dentadas satélites en la rueda internamente dentada sin incrementar con ello el coste de fabricación, siendo necesarias solamente unas pequeñas variaciones en las formas existentes.
Este problema se resuelve según la invención por el hecho de que ninguna de las zonas angulares del lado frontal de la rueda internamente dentada dirigido en sentido contrario a la dirección de ensamble es parte de un plano al que pertenece una de las demás zonas angulares, estando orientados los planos paralelamente uno a otro y en ángulo recto con el eje de simetría del servoaccionamiento. Gracias a esta medida se consigue que las distintas ruedas dentadas satélites lleguen independientemente una de otra en el tiempo a la zona de dentado crítica para el montaje de la rueda internamente dentada, de modo que sea posible una autoalineación más fácil de las ruedas dentadas satélites. Esto aumenta la velocidad de montaje y reduce la frecuencia de errores en el montaje. La invención se puede utilizar en engranajes planetarios con dos o más ruedas dentadas satélites en la misma etapa del engranaje.
En las reivindicaciones subordinadas se exponen perfeccionamientos de la invención. Empleando tres ruedas dentadas satélites en la misma etapa del engranaje, se ha previsto que la distancia axial entre la superficie frontal de la segunda rueda dentada satélite y la segunda zona angular de la rueda internamente dentada asociada a ella se diferencie de la distancia axial entre la superficie frontal de la tercera rueda dentada satélite y la tercera zona angular de la rueda internamente dentada asociada a ella y de la distancia axial entre la superficie frontal de la primera rueda dentada satélite y la primera zona angular de la rueda internamente dentada asociada a ella.
Para resolver con seguridad el problema citado es importante que las diferencias en las distancias sean mayores
que los desplazamientos axiales -posibles a causa de las inevitables tolerancias - de los cantos de engrane de las ruedas dentadas satélites y de la rueda internamente dentada, de modo que, al montar las ruedas dentadas satélites, solamente una respectiva rueda dentada satélite pueda alcanzar al mismo tiempo el principio de una zona de engrane entre la rueda dentada satélite y la rueda internamente dentada. Usualmente, se pueden presentar inexactitudes angulares durante el montaje y, además, los engranajes presentan necesariamente una pequeña holgura. Existen siempre también tolerancias de fabricación. Estas se suman dando una medida calculable que se tiene que respetar ineludiblemente para conseguir las ventajas citadas.
En una primera alternativa (no representada) se ha previsto que las ruedas dentadas satélites presenten un espesor diferente en dirección axial. Se puede conseguir así el desacoplamiento temporal durante el montaje. Sin embargo, es desventajoso el que sean necesarias piezas individuales diferentes. Además, con mayores números de revoluciones esta solución podría conducir a ruidos no deseados, por lo que no se prefiere esta solución.
En una segunda alternativa (no reivindicada) se ha previsto que las ruedas dentadas satélites estén montadas en disposición axial diferente sobre el portasatélites, siendo las ruedan dentadas satélites de conformación idéntica. Con esta solución se consigue también un desacoplamiento temporal del punto de engrane de las ruedas dentadas satélites. Según la constitución del portasatélites, se tiene que variar aquí solamente un componente.
En las dos alternativas citadas es problemático también el montaje axial de los portasatélites en el estado instalado. Éste tiene que efectuarse sobre el propio portasatélites, puesto que una superficie de contacto en la rueda internamente dentada o en la carcasa del engranaje haría necesario un componente adicional co-rotativo o bien, en el caso de al menos dos ruedas dentadas satélites, se tendría que aceptar una holgura axial grande.
Para materializar la segunda alternativa se propone que las ruedas dentadas satélites presenten muñones de eje sobre los cuales estén montadas radialmente las ruedas dentadas satélites, y que el portasatélites presente superficies anulares de ataque axiales en las que estén montadas axialmente las ruedas dentadas satélites, sobresaliendo axialmente las superficies anulares de ataque en medida diferente. En el caso de una realización en una sola pieza del portasatélites, por ejemplo en el caso de un portasatélites moldeado originariamente en plástico, se pueden producir sin problemas estas superficies anulares de ataque. En el caso de un portasatélites compuesto de varias piezas individuales se pueden perder las ventajas frente a la primera alternativa.
Reivindicaciones:
1. Servoaccionamiento (1) constituido por un motor eléctrico (2) y un engranaje planetario (3) , que comprende una rueda internamente dentada (4) , un portasatélites (5) y varias ruedas dentadas satélites (6a, 6b, 6c) montadas en el portasatélites (5) , en donde las ruedas dentadas satélites (6a, 6b, 6c) presentan en la zona de su dentado exterior 5 una respectiva superficie frontal (7a, 7b, 7c) adelantada en la dirección de ensamble (F) y la rueda internamente dentada (4) presenta en la zona de su dentado interno varias zonas angulares (8a, 8b, 8c) - asociadas a las ruedas dentadas satélites - de su lado frontal (9) dirigido en sentido contrario a la dirección de ensamble (F) , en una posición angular definida del portasatélites (5) con respecto a la rueda internamente dentada (4) , caracterizado porque la distancia axial (A1) entre la superficie frontal (7a) de la primera rueda dentada satélite (6a) y la primera 10 zona angular (8a) de la rueda internamente dentada (4) asociada a ella se diferencia de la distancia axial (A2) entre la superficie frontal (7b) de la segunda rueda dentada satélite (6b) y la segunda zona angular (8b) de la rueda internamente dentada (4) asociada a ella, y porque ninguna de las zonas angulares (8a, 8b, 8c) del lado frontal (9) de la rueda internamente dentada (4) dirigido en sentido contrario a la dirección de ensamble (F) es parte de un plano (12a, 12b, 12c) al que pertenece una de las otras zonas angulares (8a, 8b, 8c) , estando orientados los planos (12a, 12b, 12c) paralelamente uno a otro y en ángulo recto con el eje de simetría del servoaccionamiento.
2. Servoaccionamiento según la reivindicación 1, caracterizado porque la distancia axial (A2) entre la superficie frontal (7b) de la segunda rueda dentada satélite (6b) y la segunda zona angular (8b) de la rueda internamente dentada (4) asociada a ella se diferencia de la distancia axial (A3) entre la superficie frontal (7c) de la tercera rueda dentada satélite (6c) y la tercera zona angular (8c) de la rueda internamente dentada (4) asociada a ella y de la distancia axial (A1) entre la superficie frontal (7a) de la primera rueda dentada satélite (6a) y la primera zona angular (8a) de la rueda internamente dentada (4) asociada a ella.
3. Servoaccionamiento según la reivindicación 1 ó 2, caracterizado porque las diferencias en las distancias (A1, A2, A3) son mayores que los desplazamientos axiales de los cantos de engrane de las ruedas dentadas satélites y de la rueda internamente dentada que son posibles por efecto de las tolerancias inevitables, de modo que, durante el montaje de las ruedas dentadas satélites (6a, 6b, 6c) , solamente una respectiva rueda dentada satélite (6a, 6b, 6c) puede alcanzar simultáneamente el comienzo de una zona de engrane entre la rueda dentada satélite (6a, 6b, 6c) y la rueda internamente dentada (4) .
4. Servoaccionamiento según al menos una de las reivindicaciones anteriores, caracterizado porque la rueda internamente dentada (4) forma una sola pieza con un escudo de cojinete (13) del motor eléctrico (2) y está hecha 30 de material plástico.
Patentes similares o relacionadas:
Portasatélites, del 17 de Junio de 2020, de IMS Gear SE & Co. KGaA: Portasatélites para montar al menos una rueda satélite en un engranaje planetario para un dispositivo de regulación para regular dos componentes que pueden regularse […]
Engranaje planetario, del 10 de Junio de 2020, de Flender GmbH: Engranaje planetario , en particular, para una turbina eolica, con una carcasa de la transmision , una rueda solar central , que se mantiene […]
 Soporte para un engranaje planetario de un mecanismo de transmisión planetario, del 27 de Mayo de 2020, de Flender GmbH: Mecanismo de transmisión planetario , que comprende un soporte del planetario con una escotadura para el alojamiento de un eje del engranaje planetario […]
Soporte para un engranaje planetario de un mecanismo de transmisión planetario, del 27 de Mayo de 2020, de Flender GmbH: Mecanismo de transmisión planetario , que comprende un soporte del planetario con una escotadura para el alojamiento de un eje del engranaje planetario […]
Casquillo elástico para cojinetes planetarios, del 6 de Mayo de 2020, de FM Energie GmbH & Co. KG: Casquillo cilíndrico elástico pretensible que es capaz de absorber vibraciones en combinación con un árbol o eje de un cojinete de rueda o cojinete planetario […]
Soporte planetario, del 6 de Mayo de 2020, de Flender GmbH: Soporte planetario, mostrando un buje del lado de la transmisión , una cara externa del lado de la transmisión (2a), una cara del lado de la […]
Un conjunto de rueda planetaria para un engranaje planetario, del 1 de Abril de 2020, de Moventas Gears Oy: Un conjunto de rueda planetaria para un engranaje planetario, comprendiendo el conjunto de rueda planetaria : - un eje planetario , - una […]
Eje planetario, del 26 de Febrero de 2020, de Flender GmbH: Eje planetario para un engranaje planetario, caracterizado porque el eje planetario presenta una zona de brazo entre una zona de sujeción para la […]
 Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]
Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]