Método y aparato para calibrar una videocámara.
Un método para la calibración de una videocámara, que comprende:
la obtención de parámetros internos y externos de la videocámara según una plantilla de referencia para calibrar preliminarmente la cámara y para registrar datos en el sistema de coordenadas universal de un objeto de referencia en el mismo entorno operativo con la plantilla de referencia y cuando la videocámara necesita recalibración, la obtención de imágenes del objeto de referencia desde al menos dos perspectivas, la obtención la parámetros internos y externos de la videocámara en el tiempo en función de los datos registrados y las imágenes del objeto de referencia para recalibrar de nuevo la videocámara.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2008/072800.
Solicitante: HUAWEI DEVICE CO., LTD.
Nacionalidad solicitante: China.
Dirección: BUILDING B2, ZONE B, HUAWEI INDUSTRIAL BASE BANTIAN LONGGANG DISTRICT SHENZHEN GUANGDONG 518129 CHINA.
Inventor/es: WANG, JING, LI, KAI, LIU,YUAN, FANG,Ping.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
PDF original: ES-2382233_T3.pdf
Fragmento de la descripción:
Método y aparato para calibrar una videocámara CAMPO DE LA INVENCIÓN
La presente invención se refiere a una tecnología de procesamiento de imágenes y, en particular, a un método y un aparato para calibrar una videocámara.
ANTECEDENTES DE LA INVENCIÓN
En el sistema de visión en estéreo de una videocámara, con el fin de obtener la información de profundidad o paralaje de un objeto en el entorno operativo, es necesario obtener una relación de proyección entre las coordenadas de un punto determinado del objeto en el sistema de coordenadas universal y las coordenadas de un punto de creación de imágenes del objeto del plano de imágenes. La tecnología de calibración de videocámara se desarrolla para registrar dicha información.
Esta tecnología está diseñada para obtener los parámetros internos y externos de la videocámara. Las características geométricas y ópticas de la videocámara se denominan parámetros internos y la relación de posición del sistema de coordenadas de la videocámara con respecto al sistema de coordenadas espacial se denomina parámetros externos.
En general, se dispone de tres métodos para calibrar la videocámara, incluyendo los métodos de calibración tradicional, calibración basada en visión activa y autocalibración.
La calibración tradicional se refiere a: utilizar un bloque de calibración maquinado con precisión como la plantilla de referencia para calcular los parámetros internos y externos de la videocámara estableciendo una relación de correspondencia o mapeado, entre los puntos existentes en las coordenadas tridimensionales (3D) en el bloque de calibración y sus puntos de imágenes.
La calibración basada en visión activa se refiere a: controlar la videocámara para realizar un movimiento especial, por ejemplo, una rotación alrededor del centro óptico o desplazamiento en dirección horizontal y el cálculo de los parámetros internos en función de las características especiales de dicho movimiento.
La autocalibración se refiere a: suponiendo que no se cambia ningún parámetro interno y el mapeado entre puntos de imagen se establece cuando se toman imágenes diferentes, la calibración de la videocámara en función de dicho mapeado entre los puntos de imagen y las limitaciones especiales entre los puntos de creación de imágenes en múltiples imágenes.
En el documento de Mackacek M. et al, "Calibración en dos etapas de un sistema de cámara estéreo para mediciones en grandes volúmenes", Meas. Sci. Technol. Vol. 14, páginas 1631 - 1639, 2003, se da a conocer un procedimiento de calibración en dos etapas en donde se necesiten calibraciones frecuentes.
A través de la investigación y de la práctica, el inventor ha identificado los siguientes problemas con la técnica antes citada.
1. Con respecto a la calibración tradicional, se necesita un bloque de calibración cada vez que se cambia el ángulo o la posición de la videocámara. Sin embargo, la colocación del bloque de calibración en un entorno operativo, durante un periodo prolongado de tiempo, puede hacer que el entorno operativo no sea armonioso y no está permitido en algunos entornos operativos. Además, es también incómodo sustituir el bloque de calibración cada vez que se 50 cambia el ángulo o la posición de la videocámara.
2. Con respecto a la calibración basada en la visión activa, la videocámara necesita comprobarse para realizar un movimiento especial. Dicho movimiento, sin embargo, no se puede percibir ni controlar en algunas circunstancias. En tales casos, no se podrá utilizar este método.
3. Con respecto a la autocalibración, la videocámara se calibra con el supuesto de que los parámetros internos permanecen invariables y se determina el mapeado entre los puntos de imagen. De este modo, la calibración no es precisa ni estable. Por lo tanto, dicho método no es aplicable si se cambia cualquier parámetro interno.
60 SUMARIO DE LA INVENCIÓN
Un método y un aparato para calibrar una videocámara se dan a conocer en las formas de realización de la presente invención. Dicho método y aparato son aplicables a múltiples entornos operativos y se caracterizan por su fácil manejo y alta precisión.
Un método para calibrar una videocámara se da a conocer en una forma de realización de la presente invención para resolver los problemas técnicos antes citados. Este método comprende:
la obtención de parámetros internos y externos de la videocámara según la plantilla de referencia y el registro de datos en el sistema de coordenadas universal del objeto de referencia en el entorno operativo y cuando la videocámara necesita calibración, la obtención de imágenes del objeto de referencia desde al menos tres perspectivas, la obtención de los parámetros internos y externos de la videocámara en función de los datos registrados del objeto de referencia y la calibración de la videocámara.
En una forma de realización de la presente invención, se da a conocer, además, un método para calibrar la videocámara. Este método comprende:
la obtención de parámetros internos y externos de la videocámara según la plantilla de referencia y el registro de datos del objeto de referencia en el entorno operativo y cuando la videocámara necesita calibración, la obtención de imágenes del objeto de referencia desde al menos dos perspectivas, la obtención de los parámetros internos y externos de la videocámara en función de los datos registrados del objeto de referencia y la calibración de la videocámara.
Un aparato para calibrar la videocámara se da a conocer, además, en otra forma de realización de la presente invención. Este aparato comprende:
una unidad de calibración preliminar, adaptada para: obtener parámetros internos y externos de la videocámara según la plantilla de referencia y registrar, datos en el sistema de coordenadas universal, del objeto de referencia en el entorno operativo y una unidad de recalibración, adaptada para: cuando la videocámara necesita calibración, la obtención de imágenes del objeto de referencia desde al menos tres perspectivas, obtener los parámetros internos y externos de la videocámara en función de los datos registrados del objeto de referencia y calibrar la videocámara.
Un aparato para calibrar la videocámara se da a conocer, además, en otra forma de realización de la presente invención. Este aparato comprende:
una unidad de calibración preliminar, adaptada para: obtener parámetros internos y externos de la videocámara según la plantilla de referencia y registrar datos del objeto de referencia en el entorno operativo y una unidad de recalibración, adaptada para: cuando la videocámara necesita calibración, obtener imágenes del objeto de referencia desde al menos dos perspectivas, obtener los parámetros internos y externos de la videocámara en función de los datos registrados del objeto de referencia y calibrar la videocámara.
Según se describe en la solución técnica anterior, para calibrar una videocámara, se necesita solamente una plantilla de referencia cuando se toman imágenes de un nuevo entorno operativo. Durante la calibración preliminar, necesita registrarse la información del objeto de referencia siguiente. En tal caso, sólo es necesario mantener el objeto de referencia en el entorno operativo y se puede utilizar el objeto de referencia para calibrar la videocámara. Ya no es necesario utilizar la plantilla de referencia para la calibración cada vez se cambia el ángulo de toma de imagen o la posición de la videocámara, con lo que se simplifica el funcionamiento y es aplicable a varios entornos operativos. Además, dicha solución es también aplicable aún cuando el movimiento de la videocámara sea imperceptible o no susceptible de control. Además, puesto que una plantilla de referencia maquinada con precisión, con datos dados, se utiliza en la calibración preliminar y los datos del objeto de referencia, registrados en la calibración preliminar, son exactos, resulta bastante alta la precisión de la calibración en función de los datos del objeto de referencia.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
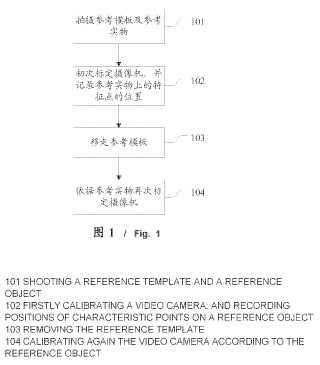
La Figura 1 es un diagrama de flujo de una primera forma de realización de un método para calibrar la videocámara de la presente invención;
La Figura 2 representa un teselado;
La Figura... [Seguir leyendo]
Reivindicaciones:
1. Un método para la calibración de una videocámara, que comprende:
la obtención de parámetros internos y externos de la videocámara según una plantilla de referencia para calibrar preliminarmente la cámara y para registrar datos en el sistema de coordenadas universal de un objeto de referencia en el mismo entorno operativo con la plantilla de referencia y cuando la videocámara necesita recalibración, la obtención de imágenes del objeto de referencia desde al menos dos perspectivas, la obtención la parámetros internos y externos de la videocámara en el tiempo en función de los datos registrados y las imágenes del objeto de referencia para recalibrar de nuevo la videocámara.
2. El método para la calibración de la videocámara según la reivindicación 1, en donde:
la obtención de imágenes del objeto de referencia desde al menos dos perspectivas comprende: la obtención de imágenes del objeto de referencia desde al menos tres perspectivas.
3. El método para la calibración de la videocámara según la reivindicación 1 o 2, en donde:
el registro de los datos del objeto de referencia en el mismo entorno operativo con la plantilla de referencia comprende: la determinación y el registro de posiciones de puntos de características en el objeto de referencia, en la proximidad de la plantilla de referencia en el entorno operativo, en función de los parámetros internos y externos obtenidos de la videocámara según la plantilla de referencia.
4. El método para la calibración de la videocámara según la reivindicación 3, en donde: la plantilla de referencia es un rectángulo inscrito en un círculo y
los puntos de características en el objeto de referencia comprende: los puntos de características en las líneas rectas y/o las líneas de arcos en el objeto de referencia.
5. El método para la calibración de la videocámara según una de las reivindicaciones 1 a 4, en donde:
el objeto de referencia es una placa de identificación y la obtención de los parámetros internos y externos de la videocámara, en el tiempo, basados en los datos y las imágenes registradas del objeto de referencia, para recalibrar la videocámara, comprende: detectar líneas rectas de la placa de identificación en las imágenes obtenidas; ajustar cada línea recta y establecer una ecuación de coordenadas para obtener posiciones de cada vértice y punto en donde se intersectan las diagonales, la obtención de coordenadas de puntos de imágenes de caracteres en la placa de identificación y las correspondientes coordenadas de la placa de identificación en un sistema de coordenadas universal y el cálculo de los parámetros internos y externos de la videocámara en función de las coordenadas de imágenes de los puntos de características, las correspondientes coordenadas en el sistema de coordenadas universal y ecuaciones lineales.
6. Un aparato para calibrar una videocámara, que comprende:
una unidad de calibración preliminar, adaptada para: obtener parámetros internos y externos de la videocámara según una plantilla de referencia y para registrar datos en el sistema de coordenadas universal de un objeto de referencia en el mismo entorno operativo con la plantilla de referencia y una unidad de recalibración, adaptada para: cuando la videocámara necesita recalibración, obtener imágenes del objeto de referencia desde al menos dos perspectivas, obtener los parámetros internos y externos de la videocámara en el tiempo según los datos registrados del objeto de referencia para recalibrar la videocámara.
7. El aparato para calibrar la videocámara según la reivindicación 6, en donde la unidad de calibración preliminar comprende:
una unidad de obtención de parámetros, adaptada para: obtener los parámetros internos y externos de la videocámara según la plantilla de referencia y una unidad de registro adaptada para: registrar los datos del objeto de referencia en el entorno operativo.
8. El aparato para calibrar la videocámara según la reivindicación 7, en donde: la plantilla de referencia es un teselado y
la unidad de registro comprende una primera unidad de registro, adaptada para: según los parámetros internos y externos obtenidos de la videocámara basados en la plantilla de referencia, determinar y registrar posiciones de puntos de características en el objeto de referencia, en la proximidad del teselado en el entorno operativo.
9. El aparato para calibrar la videocámara según la reivindicación 7 u 8, en donde: la plantilla de referencia es un rectángulo inscrito en un círculo y
la unidad de registro comprende una segunda unidad de registro, adaptada para: cuando se detecta líneas rectas del 5 rectángulo inscrito en el círculo, detectar líneas rectas y/o líneas de arcos en el objeto de referencia y registrar posiciones de puntos de características en el objeto de referencia.
10. El aparato para calibrar la videocámara según una de las reivindicaciones 6 a 9, en donde la unidad de recalibración comprende:
una unidad de obtención de imágenes, adaptada para: obtener las imágenes del objeto de referencia desde al menos dos perspectivas cuando la videocámara ha de recalibrarse y una unidad de cálculo, adaptada para: detectar las características del objeto de referencia para obtener posiciones de imágenes de los puntos de características y de líneas; obtener coordenadas de las imágenes de los puntos de características y de las líneas y de las correspondientes coordenadas del objeto de referencia en un sistema de coordenadas universal y calcular los parámetros internos y externos de la videocámara en función de las coordenadas de las imágenes de los puntos de características, de las correspondientes coordenadas en el sistema de coordenadas universal y de las ecuaciones de parámetros.
11. El aparato para calibrar la videocámara según la reivindicación 10, en donde:
el objeto de referencia es una placa de identificación y la unidad de cálculo comprende una unidad de cálculo de placa de identificación, adaptada para: detectar líneas rectas de la placa de identificación; ajustar cada línea recta y establecer una ecuación de coordenadas para obtener posiciones de cada vértice y punto en donde se produce la intersección de las diagonales; obtener coordenadas de puntos de imágenes de caracteres en la placa de identificación y las correspondientes coordenadas de la placa de identificación en el sistema de coordenadas universal y para calcular los parámetros internos y externos de la videocámara en función de las coordenadas de las imágenes de los puntos de características, las correspondientes coordenadas en el sistema de coordenadas universal y las ecuaciones lineales.
Se realiza una toma de imagende la plantilla de referencia y del objeto de referencia La videocámara es preliminarmente calibrada y seregistran las posiciones de los puntos de características en el objeto de referencia La plantilla de referencia se desplaza alejándose
La videocámara se recalibra en función del objeto dereferencia
Figura 1
Figura 2
Figura 3
Se realiza la toma de imagendel teselado utilizado como la plantilla de referencia y el objeto de referencia
La videocámara se calibra en función de los datos dados del teselado Se registran las posiciones delos puntos de características en el objeto de referencia La plantilla de referencia se desplaza alejándose La videocámara se recalibra en función del objeto de referencia Figura 4 Figura 5
Se realiza una toma de imagen del rectángulo inscrito en un círculoutilizado como la plantilla de referencia y el objeto de referencia
La videocámara se calibra en función de los datos dados del rectángulo inscrito en un círculo Se registran las posiciones de los puntos de características en el objeto de referencia La plantilla de referencia se desplaza alejándose La videocámara se recalibra en
función del objeto de referencia
Figura 6
Unidad de obtención de parámetros
Figura 7
Primera unidad de registro Segunda unidad de registro Unidad de registro
Unidad de calibración preliminar
Unidad de cálculo Unidad de obtención de imagen
Unidad de recalibración
Figura 8
Se realiza una toma de imagen del teselado usado como la plantilla de referencia y el objeto de referencia desde al menos dos perspectivas La videocámara se calibra en función de los datos dados del teselado Se registran las posiciones delos puntos de características en el objeto de referencia La plantilla de referencia se desplaza alejándose
La videocámara se recalibra en función del objeto de referencia
Figura 9
Unidad de Unidadobtención de de registro
parámetros Unidad de calibración preliminar Figura 10 Unidad de cálculo Unidad de obtención de imagen Unidad de recalibración
Patentes similares o relacionadas:
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento: recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas. La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Distribución controlada de muestras sobre sustratos, del 27 de Mayo de 2020, de Roche Diagnostics Hematology, Inc: Un procedimiento para distribuir una muestra de líquido sobre un sustrato , comprendiendo el procedimiento: obtener una […]
Procedimientos, sistemas y dispositivos para analizar datos de imágenes pulmonares, del 27 de Mayo de 2020, de Pulmonx Corporation: Procedimiento para analizar datos de tomografía computarizada de un pulmón, comprendiendo el procedimiento: recibir mediante un dispositivo […]
Sistema y procedimiento de control de calidad de platos preparados, del 14 de Mayo de 2020, de BEABLOO, S.L: Sistema y procedimiento de control de calidad de platos preparados. El sistema comprende medios de detección para detectar los ingredientes […]
Registro de imagen de catéter del seno coronario, del 13 de Mayo de 2020, de Biosense Webster (Israel), Ltd: Un aparato que comprende: un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo; una pantalla ; un dispositivo […]
Sistema y aplicación para visualizar la realidad exterior mientras se utilizan teléfonos y dispositivos móviles, del 11 de Mayo de 2020, de YAGÜE HERNANZ, Ricardo: 1. Sistema y aplicación para ver en los teléfonos y terminales móviles la realidad exterior a la vez que se usan y se visualizan sus […]