MÉTODO PARA PROCESAR UNA SEÑAL DE ECO DE RADAR, QUE ES PROPORCIONADA POR UN OBJETIVO, PARA COMPENSAR EFECTOS DE DEGRADACIÓN EN DICHA SEÑAL DEBIDOS AL MOVIMIENTO DEL OBJETIVO.
Un método (100) de procesamiento de una señal de eco de radar,
que es proporcionada por un objetivo, con el fin de compensar efectos de degradación introducidos en dicha señal por movimiento de objetivo, comprendiendo el método (100) los siguientes pasos: - determinar (102-106) el valor de al menos un parámetro de movimiento de objetivo, seleccionando de entre una pluralidad de valores (VR1,..., VRN) de prueba posibles un valor (VR), que maximiza un funcional definido sobre la señal de eco de radar, - realizar una corrección (107) de señal de eco de radar, basada en dicho valor (VR), que está determinado por al menos un parámetro de movimiento; caracterizado porque dicho funcional es la derivada de tiempo de la señal de eco de radar, o una función dependiente de dicha derivada
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09170233.
Solicitante: MBDA ITALIA S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA TIBURTINA KM 12.400 00131 ROMA ITALIA.
Inventor/es: Battisti,Nicola.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- G01S13/90F
Clasificación PCT:
- G01S13/90 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan técnicas de apertura sintética.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2374141_T3.pdf
Fragmento de la descripción:
Método para procesar una señal de eco de radar, que es proporcionada por un objetivo, para compensar efectos de degradación en dicha señal debidos al movimiento del objetivo.
La presente invención se refiere al campo técnico de sistemas de detección de radar y en particular se refiere a un método para procesar una señal de eco de radar, que es proporcionada por un objetivo, para compensar efectos de degradación en dicha señal debido al movimiento del objetivo. Un método de procesamiento de acuerdo con el preámbulo de la reivindicación 1 es divulgado en Performance analysis of an ISAR contrast-based autofocusing algorithm using real data, Martorella et al., Proceedings of the International Radar Conference 2003, Adelaida, Australia.
Es conocido que en los sistemas de radar el movimiento relativo entre el detector de radar y el objetivo es de tal manera que introduce efectos de degradación en la señal de eco de radar recibida (o “perfil de alcance”) . De hecho, es conocido que tal movimiento relativo introduce borrosidad (una reducción del nivel de pico y un incremento del tamaño de los lóbulos laterales en el perfil de alcance) . En particular, esto es debido al hecho de que el movimiento relativo entre el dispositivo de radar y el objetivo introduce tanto un desplazamiento Doppler como una modulación de fase residual en el perfil de alcance.
Los efectos de degradación descritos anteriormente tienen un impacto negativo (particularmente pero no exclusivamente) en el rendimiento o en los sistemas de radar de alta resolución, o en los sistemas de radar HRR (High Range Resolution) , y más en particular el rendimiento de los llamados sistemas de radar de banda sintética. En este tipo particular de sistemas, obtener un perfil de alcance bien centrado y mantener la resolución deseable del perfil de alcance es de vital importancia.
La compensación de los efectos de degradación del perfil de alcance mencionados anteriormente por medio de técnicas de procesamiento basadas en maximizar la medida de contraste es conocida en la técnica anterior. Un ejemplo del método mencionado anteriormente está descrito por ejemplo en Focusing of two-dimensional ISAR images by contrast maximization, de F. Berizzi y G. Corsini, IEEE Transaction on Aerospace and Electronic Systems, 3 de julio de 1996.
El objeto de la presente invención es proveer de un método de compensación capaz de ofrecer rendimiento mejorado con respecto a los métodos de compensación de la técnica anterior, en particular con respecto a los métodos que usan la técnica de medidas de contraste de optimización.
Tal objeto se alcanza a través de un método de procesamiento para la compensación de efectos de degradación debido al movimiento de objetivo como se define en la reivindicación 1 adjunta en su realización más general y en las reivindicaciones dependientes en sus realizaciones detalladas.
También un detector de radar como se define en la reivindicación 9 adjunta forma un objeto de la presente invención.
Características y ventajas adicionales de la presente invención quedarán claras a partir de la descripción de sus realizaciones preferidas y no limitativas proporcionadas a continuación, en las que:
- la figura 1 representa un organigrama simplificado de un método de compensación, o método de centrado;
- la figura 2 representa un diagrama de bloque funcional de un dispositivo de radar que comprende un módulo para procesar la señal para compensar efectos de degradación debido al movimiento de objetivo;
- la figura 3 representa un detalle adicional de una parte del diagrama funcional del módulo para procesar la señal de la figura 1;
- la figura 4 representa algunos gráficos con relación a un perfil de alcance compensado que tiene un grado de centrado relativamente bajo;
- la figura 5 representa algunos gráficos con relación a un perfil de alcance compensado que tiene un grado de centrado mayor con respecto al perfil de alcance de la figura 4;
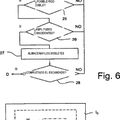
- la figura 6 representa un gráfico que perfila el desarrollo del módulo máximo de las derivadas de una señal de eco de radar compensada en función de diferentes valores de prueba seleccionados para la velocidad radial de objetivo que produjo la señal de eco de radar, bajo condiciones de relación señal/ruido relativamente altas;
- la figura 7 representa un gráfico que perfila el desarrollo del módulo máximo de las derivadas de una señal de eco de radar compensada en función de diferentes valores de prueba seleccionados para la velocidad radial de objetivo que produjo la señal de eco de radar, bajo condiciones de relación señal/ruido relativamente altas; y
- las figuras 8 y 9 muestran gráficos con relación a resultados experimentales en los que los rendimientos de un método de acuerdo con la presente invención son comparados con respecto a métodos de compensación basados en el método de maximización de contraste.
Elementos o partes de elementos en común entre las realizaciones descritas en lo sucesivo serán indicados usando los mismos números de referencia.
En referencia a las figuras mencionadas anteriormente, un método para procesar una señal de eco de radar, en lo sucesivo referido como “perfil de alcance”, para compensar efectos de degradación, introducidos en dicha señal mediante movimiento de objetivo es indicado en su totalidad con 100. Para mayor brevedad, el método 100 de procesamiento mencionado anteriormente también será indicado en la presente descripción como un método 100 de compensación o método 100 de centrado.
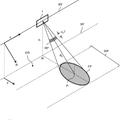
Debería observarse que de acuerdo con la presente descripción el término “movimiento de objetivo” será usado generalmente para indicar un movimiento relativo entre el dispositivo de radar y un objetivo impactado por una señal de eco de radar transmitida por el dispositivo de radar. Tal movimiento puede ser debido, así, al movimiento de objetivo móvil con respecto a un dispositivo de radar fijo, debido al movimiento de un dispositivo de radar móvil con respecto a un objetivo fijo, así como debido al movimiento relativo entre un dispositivo de radar y un objetivo, siendo ambos móviles.
En una realización particularmente ventajosa pero no limitativa, el método 100 de compensación comprende un paso 101 para reconstruir un perfil de alcance para ser compensado empezando a partir de una pluralidad de señales de eco de radar recibidas desde el dispositivo de radar, en respuesta a una pluralidad de señales transmitidas por el dispositivo de radar al objetivo de acuerdo con la llamada técnica de “paso de frecuencia”. Es conocido que a través de este tipo de técnica es posible obtener un perfil de alcance de alta resolución, o perfil de alcance HRR (High Range Resolution) , transmitiendo (a través del dispositivo de radar) una secuencia de pulsaciones en diferentes frecuencias de soporte y procesando adecuadamente las señales de eco de radar recibidas para combinarlas juntas con el fin de obtener una banda sintética ancha. Esta técnica tiene la ventaja de proveer perfiles de alcance de alta resolución que requieren una banda instantánea relativamente baja y, así, una frecuencia de muestra relativamente baja. La técnica de reconstrucción de perfil de alcance de alta resolución de acuerdo con el método de paso de frecuencia ya ha sido largamente considerada como parte del conocimiento técnico de un hombre experto en la técnica y, así, no será tratada adicionalmente en detalle en la presente descripción. Tal técnica es descrita por ejemplo en Stepped frequency processing by reconstruction of target reflectivity spectrum, de R. T. Lord y M. R. Ingss, Proceedings of the IEEE South Africa Symposyum on Communication and Signal Processing Conference, 910 de septiembre de 1997.
Antes de profundizar en la descripción del método 100 de la figura 1, se considera adecuado tratar unas pocas cuestiones con relación al modelo usado para señales de radar transmitidas por un detector de radar y las señales reflejadas por un objetivo y recibidas por el detector de radar.
La señal transmitida, en la forma de envolvente compleja, por un detector de radar hacia un objetivo en caso de transmisión de acuerdo con el método de paso de frecuencia es una secuencia de N pulsaciones espaciadas en frecuencia y puede ser escrita en la forma:
j2Jft
i
s (t) =p (t) .e i = 1, 2, …, N (1)
Ti en la que:
jJkt ( t )
p (t) = A.e 2 rect (2) T
y:... [Seguir leyendo]
Reivindicaciones:
1. Un método (100) de procesamiento de una señal de eco de radar, que es proporcionada por un objetivo, con el fin de compensar efectos de degradación introducidos en dicha señal por movimiento de objetivo, comprendiendo el método (100) los siguientes pasos:
- determinar (102-106) el valor de al menos un parámetro de movimiento de objetivo, seleccionando de entre una pluralidad de valores (VR1, …, VRN) de prueba posibles un valor (VR) , que maximiza un funcional definido sobre la señal de eco de radar,
- realizar una corrección (107) de señal de eco de radar, basada en dicho valor (VR) , que está determinado por al menos un parámetro de movimiento;
caracterizado porque dicho funcional es la derivada de tiempo de la señal de eco de radar, o una función dependiente de dicha derivada.
2. Un método (100) de procesamiento de acuerdo con la reivindicación 1, en el que el paso (102-106) de determinación del valor (VR) de al menos un parámetro de movimiento comprende los siguientes pasos:
a) corregir (102) la señal de eco de radar basada en cada valor de prueba de dicha pluralidad de valores VR1, …, VRN con el fin de obtener una pluralidad de señales corregidas correspondientes, cada una de ellas estando asociada a un valor de prueba respectivo;
b) computar (103) la derivada de tiempo, o una función de dicha derivada, de cada una de dichas señales corregidas;
c) computar (104) , para cada una de dichas derivadas, o dichas funciones de la derivada, el módulo máximo respectivo, con el fin de proveer de una pluralidad de módulos máximos, cada uno asociado a un valor de prueba respectivo de al menos un parámetro de movimiento;
d) seleccionar (106) de entre dichos valores de prueba, el valor de prueba al que el módulo que tiene un valor máximo entre dicha pluralidad de módulos máximos está asociado.
3. Un método (100) de procesamiento de acuerdo con la reivindicación 2, que comprende además, entre el paso (104) de computación c) y el paso (106) de selección d) , un paso (105) de interpolación e) de dicha pluralidad de módulos máximos, proporcionando una pluralidad de módulos interpolados máximos, cada uno asociado a un respectivo valor VR1, …, VRN de prueba de dicho parámetro de movimiento, y en el que dicho paso (106) de selección d) es de tal manera que selecciona, entre dichos valores VR1, …, VRN de prueba, el valor de prueba, al que está asociado el módulo que tiene un valor máximo, entre dicha pluralidad de módulos máximos interpolados.
4. Un método (100) de procesamiento de acuerdo con la reivindicación 3, en el que el paso (105) de interpolación e) se realiza por medio de un polinomio, de acuerdo con al menos criterio de cuadrados.
5. Un método (100) de procesamiento de acuerdo con la reivindicación 4, en el que el polinomio es un polinomio de segundo orden.
6. Un método (100) de procesamiento de acuerdo con cualquiera de las reivindicaciones precedentes, en el que el al menos un parámetro de movimiento de objetivo es la velocidad radial.
7. Un método (100) de procesamiento de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la señal de eco de radar es una señal de banda sintética, proporcionada por medio de una técnica de paso de frecuencia.
8. Un método (100) de procesamiento de acuerdo con cualquiera de las reivindicaciones precedentes, en el que la señal de eco de radar es una entre una pluralidad de señales de eco de radar, proporcionada por el objetivo, cada una correspondiendo a un punto de difusión respectivo en el objetivo, y en el que dicha señal de eco de radar, procesada por dicho método, corresponde al baricentro de dicho objetivo.
9. Dispositivo (200) de detección de radar que comprende un módulo (300) de procesamiento digital adaptado para realizar un método (100) de acuerdo con cualquiera de las reivindicaciones precedentes.
10. Producto de ordenador que comprende porciones de código de equipo lógico informático, que puede ser cargado directamente en memoria de un ordenador, adaptado para realizar un método de acuerdo con cualquiera de las reivindicaciones 1 a 8.
Patentes similares o relacionadas:
 METODO Y APARATO PARA LA DETECCION DE OBJETOS MOVILES MEDIANTE IMAGENES SAR, del 7 de Julio de 2010, de GALILEO AVIONICA S.P.A: Un método para la detección de objetos móviles mediante imágenes SAR, que comprende las etapas de:
generación de una señal (PRF) […]
METODO Y APARATO PARA LA DETECCION DE OBJETOS MOVILES MEDIANTE IMAGENES SAR, del 7 de Julio de 2010, de GALILEO AVIONICA S.P.A: Un método para la detección de objetos móviles mediante imágenes SAR, que comprende las etapas de:
generación de una señal (PRF) […]
 Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Procedimiento y dispositivo para el procesamiento de datos brutos SAR, del 29 de Julio de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para el procesamiento asistido por ordenador de datos brutos SAR (RD), que comprenden ecos de radar de pulsos de radar (RD), que […]
Radar de formación de imágenes subsuperficie, del 22 de Abril de 2020, de SAAB AB: Un procedimiento para eliminar los ecos parásitos superficiales en el radar de apertura sintética, SAR, formación de imágenes de objetivos de subsuperficie […]
Detección de barcos en datos de radar de interferometría, del 15 de Enero de 2020, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Procedimiento para averiguar una posición y una dirección de navegación en cada caso para uno o varios vehículos acuáticos que navegan en el agua a partir de datos de interferometría […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
Radar interferométrico con antena giratoria, del 25 de Diciembre de 2019, de UNIVERSITA' DEGLI STUDI DI FIRENZE: Un radar interferométrico, que comprende: un brazo , que gira con respecto a un eje (z) de un plano (zx) ortogonal a un eje de rotación (y); un […]
Geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica usando dos imágenes de SAR de apertura larga, del 20 de Noviembre de 2019, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Método para la geolocalización tridimensional automática de objetivos de SAR y estimación simultánea de retardos de propagación troposférica […]
Búsqueda e identificación electromagnética en zonas de campo cercano, del 8 de Mayo de 2019, de Levitection Ltd: Un procedimiento de detección, que comprende las etapas de: (a) transmitir secuencialmente una señal de cada uno de una pluralidad de transmisores (TE); (b) recibir, […]