Un mecanismo de amortiguamiento (100), que comprende: una zapata de amortiguamiento (101);
y una banda de amortiguamiento (102) acoplada a la zapata de amortiguamiento (101); en el que: la zapata de amortiguamiento (101) tiene una base; una pluralidad de ranuras transversales (110) sobre una superficie de acoplamiento exterior arqueada de la zapata de amortiguamiento; la banda de amortiguamiento comprende una pluralidad de nervaduras transversales espaciadas (120) sobre una superficie de acoplamiento interior arqueada de la banda de amortiguamiento; la banda de amortiguamiento (102) está acoplada a la zapata de amortiguamiento (101) por las nervaduras transversales espaciadas y las ranuras transversales, produciendo el acoplamiento cooperativo de las nervaduras transversales espaciadas y las ranuras transversales una fuerza friccional impartida a la banda de amortiguamiento (102) durante el funcionamiento; y caracterizado por: protrusiones (228) que se extienden desde una parte inferior (229) de la banda de amortiguamiento (102) para acoplarse a los entrantes cooperativos (231) en la base de la zapata de amortiguamiento (101); y un corte anular (112) se incluye en un borde superior de la superficie exterior arqueada de la zapata de amortiguamiento y una parte de borde (227) en la banda de amortiguamiento (102) se acopla sobre el corte anular de la zapata de amortiguamiento (101)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/012374.
F16H7/12MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16HTRANSMISIONES. › F16H 7/00 Transmisiones para transmitir un movimiento por órganos flexibles sin fin (particulares para transmitir un movimiento rotativo con relación de velocidad variable o para invertir un movimiento rotativo F16H 9/00). › de una polea loca.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
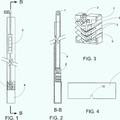
La invención se refiere a un mecanismo de amortiguamiento y, más concretamente, a un mecanismo de amortiguamiento para un tensor. Antecedentes de la invención Los tensores de correa se utilizan para aplicar una carga a una correa. Normalmente, la correa se utiliza en una aplicación de motor para accionar diversos accesorios asociados al motor. Por ejemplo, un compresor y un alternador de aire acondicionado son dos de los accesorios que pueden ser accionados mediante un sistema de transmisión por correa. Un tensor de correa comprende una polea unida a un brazo. Un muelle está conectado entre el brazo y una base. El muelle también puede acoplarse a un mecanismo de amortiguamiento. El mecanismo de amortiguamiento comprende superficies friccionales en contacto mutuo. El mecanismo de amortiguamiento amortigua un movimiento oscilatorio del brazo provocado por el funcionamiento de la transmisión por correa. A su vez, esto mejora la duración de la correa. La patente estadounidense 5,632,697 de Serkh (1997) es representativa de la técnica y divulga un mecanismo de amortiguamiento activado por muelle que proporciona una fuerza normal mayor que la fuerza de un muelle aplicado a un freno de zapatas que se acopla a un miembro cilíndrico. También se hace referencia a la solicitud de patente estadounidense en tramitación con número de serie 09/861,338 presentada el 18 de mayo de 2001, que divulga un tensor que cuenta con un mecanismo de amortiguamiento. Las características de la presente invención según se definen en las reivindicaciones independientes que se conocen por el documento US2002/0010045 han sido incluidas en los preámbulos de dichas reivindicaciones. Resumen de la invención En la siguiente descripción de la invención y en los dibujos adjuntos se señalarán o advertirán los aspectos de la invención. La presente invención proporciona un mecanismo de amortiguamiento según se define en las reivindicaciones. Breve descripción de los dibujos La figura 1 es una vista superior en perspectiva de un mecanismo de amortiguamiento. La figura 2 es una vista en sección transversal de un mecanismo de amortiguamiento en la línea 2-2 de la figura 1. La figura 3 es una vista superior en perspectiva de un mecanismo de amortiguamiento. La figura 4 es una vista en sección transversal de un mecanismo de amortiguamiento en la línea 4-4 de la figura 3. La figura 5 es una vista superior en perspectiva de un mecanismo de bloqueo sobre la zapata de amortiguamiento de un mecanismo de amortiguamiento de la invención. La figura 6 es una vista superior en perspectiva de un mecanismo de bloqueo sobre la banda de amortiguamiento de un mecanismo de amortiguamiento de la invención. La figura 7 es una vista superior en perspectiva de un mecanismo de amortiguamiento de la técnica anterior. La figura 8 es una vista superior en perspectiva de una zapata de amortiguamiento sobre el mecanismo de amortiguamiento de la técnica anterior. La figura 9 es una vista superior en perspectiva de una banda de amortiguamiento del mecanismo de amortiguamiento de la técnica anterior. La figura 10 es un diagrama de fuerzas que actúan sobre un mecanismo de amortiguamiento. La figura 11 es una vista en sección transversal de fuerzas que actúan sobre un tensor en la línea 11-11 de la figura 12. La figura 12 es una vista en planta de fuerzas que actúan sobre un tensor. La figura 13 es un diagrama de fuerzas que actúan sobre un mecanismo de amortiguamiento. 2 La figura 14 es una vista en sección transversal de fuerzas que actúan sobre un tensor en la línea 14-14 de la figura 15. La figura 15 es una vista en planta de fuerzas que actúan sobre un tensor. La figura 16 es una vista de despiece de un tensor que tiene un mecanismo de amortiguamiento. La figura 17 es una vista de despiece de un tensor que tiene un mecanismo de amortiguamiento. Descripción de la invención La figura 1 es una vista superior en perspectiva de un mecanismo de amortiguamiento. El mecanismo de amortiguamiento se utiliza en un tensor de correa, véase la figura 17. El tensor de correa se acopla a una correa mediante una polea unida a un brazo de palanca. El tensor se emplea para aplicar una precarga a la correa y para amortiguar los movimientos oscilatorios de la correa. El mecanismo de amortiguamiento amortigua los movimientos oscilatorios de un brazo de palanca de tensor. El brazo de palanca generalmente experimenta un movimiento bidireccional u oscilatorio provocado por los cambios en el estado operativo de una transmisión por correa, por ejemplo, por cambios en la carga. El amortiguamiento es necesario para eliminar energía del sistema de la correa, asegurando de este modo el funcionamiento adecuado del tensor con el fin de maximizar la duración de la correa y la eficiencia operativa. Más concretamente, se muestra un mecanismo de amortiguamiento en la figura 1. El mecanismo de amortiguamiento 100 comprende una banda de amortiguamiento 102. La banda de amortiguamiento 102 está conectada a una superficie arqueada exterior 104 de la zapata de amortiguamiento 101. La parte de recepción del muelle o miembro de empuje 103 comprende una ranura en la zapata de amortiguamiento 101. La parte de recepción 103 recibe una espiga de extremo (no mostrada, véase 500 en la figura 15) de un muelle de bobina. La superficie 105 se acopla a una bobina de un muelle para proporcionar apoyo durante el funcionamiento. La banda de amortiguamiento 102 comprende un plástico lubricado como nailon, PA, PPA y sus equivalentes. La figura 2 es una vista en sección transversal de un mecanismo de amortiguamiento de la invención en la línea 2-2 en la figura 1. El corte anular 106 se extiende alrededor de un perímetro externo de la superficie arqueada exterior 104. Un borde o protrusión 107 se extiende alrededor de una circunferencia parcial de la zapata de amortiguamiento 101. El corte anular 106, en combinación con la protrusión 107, sirve para unir mecánicamente la banda de amortiguamiento 102 a la zapata de amortiguamiento 101. La figura 3 es una vista superior en perspectiva de un mecanismo de amortiguamiento alternativo. El mecanismo de amortiguamiento 200 comprende un primer miembro arqueado 210 y un segundo miembro arqueado 220. El primer miembro arqueado 210 tiene una parte de recepción del muelle 211 en la que puede insertarse una espiga de extremo del muelle, véase la figura 12. Una pared de la parte de recepción del muelle tiene un espesor máximo 211a en el área de contacto del muelle. La pared 211a puede afilarse desde el área de contacto en una dirección o en ambas direcciones a medida que se extiende en ambas direcciones. Por comparación, una pared similar de la técnica anterior tiene un espesor uniforme. El primer miembro arqueado 210 comprende una banda de amortiguamiento 213 unida a una zapata de amortiguamiento 212. El segundo miembro arqueado 220 comprende una banda de amortiguamiento 215 unida a una zapata de amortiguamiento 214. El primer miembro arqueado 210 está en contacto pivotal con el segundo miembro arqueado 220 en un punto de contacto 216. El punto de contacto 216 comprende el extremo 228 de la zapata de amortiguamiento 212 y el extremo 219 de la zapata de amortiguamiento 214. El punto de contacto 216 puede variar desde un radio mínimo a un radio máximo a través de un ancho W de cada zapata de amortiguamiento con respecto a un eje de rotación del brazo de palanca R-R, véase la figura 11. Con el fin de obtener el factor de amortiguamiento asimétrico deseado, el punto de contacto 216 está ubicado a una distancia radial predeterminada desde un eje de rotación del brazo de palanca R-R. Una ubicación de radio mínimo para el punto de contacto 216, mostrado en la figura 3, resulta en el factor de amortiguamiento asimétrico mayor para el mecanismo de amortiguamiento en un tensor. El punto de contacto 216 puede estar dispuesto en un radio exterior 288 que produce un factor de amortiguamiento asimétrico deseado con respecto a la ubicación de radio mínima anterior. En una disposición alternativa, el extremo 218 del primer miembro arqueado 210 está en contacto con el extremo del segundo miembro arqueado 217. En esta realización alternativa, se emplea un muelle (no mostrado) que se utiliza en la dirección opuesta de la bobina que se utilizó para la realización en la figura 3. Por lo tanto, al cambiar el punto 3 de contacto de un extremo del primer miembro arqueado y el segundo miembro arqueado a otro extremo puede utilizarse tanto un muelle hacia la izquierda como hacia la derecha. La banda de amortiguamiento 213, 215 está hecha de material friccional como plástico, compuestos fenólicos y metálicos. Una superficie de trabajo 230, 231 de la banda de amortiguamiento 213, 215 respectivamente está acoplada de forma deslizable bajo presión con una base de tensor o brazo mediante la operación de un muelle, véanse las figuras 12 y 15.... [Seguir leyendo]
Reivindicaciones:
1. Un mecanismo de amortiguamiento (100), que comprende: una zapata de amortiguamiento (101); y una banda de amortiguamiento (102) acoplada a la zapata de amortiguamiento (101); en el que: la zapata de amortiguamiento (101) tiene una base; una pluralidad de ranuras transversales (110) sobre una superficie de acoplamiento exterior arqueada de la zapata de amortiguamiento; la banda de amortiguamiento comprende una pluralidad de nervaduras transversales espaciadas (120) sobre una superficie de acoplamiento interior arqueada de la banda de amortiguamiento; la banda de amortiguamiento (102) está acoplada a la zapata de amortiguamiento (101) por las nervaduras transversales espaciadas y las ranuras transversales, produciendo el acoplamiento cooperativo de las nervaduras transversales espaciadas y las ranuras transversales una fuerza friccional impartida a la banda de amortiguamiento (102) durante el funcionamiento; y caracterizado por: protrusiones (228) que se extienden desde una parte inferior (229) de la banda de amortiguamiento (102) para acoplarse a los entrantes cooperativos (231) en la base de la zapata de amortiguamiento (101); y un corte anular (112) se incluye en un borde superior de la superficie exterior arqueada de la zapata de amortiguamiento y una parte de borde (227) en la banda de amortiguamiento (102) se acopla sobre el corte anular de la zapata de amortiguamiento (101). . 7 8 9 TÉCNICA ANTERIOR TÉCNICA ANTERIOR 11 TÉCNICA ANTERIOR 12 13 14 16 17
Patentes similares o relacionadas:
Soporte de péndulo sin holgura en el tensor de desacoplamiento, del 24 de Junio de 2020, de Schaeffler Technologies AG & Co. KG: Tensor de péndulo para un accionamiento de mecanismo de tracción sin fin de un motor de combustión interna, con una unidad base y un brazo tensor en forma de anillo […]
Tensor de correa de generador, del 29 de Octubre de 2018, de Schaeffler Technologies AG & Co. KG: Transmisión de correa de accionamiento de generador de un motor de combustión interna que contiene una disposición de generador que presenta un generador con una […]
Dispositivo de ajuste de tensión, del 25 de Octubre de 2018, de Gates Corporation: Un dispositivo de ajuste de tensión, , que comprende:
un brazo oscilante que se fija de forma giratoria a través de un conjunto […]
Dispositivo de tensado de correa para un persiana hueca, del 27 de Septiembre de 2018, de Zhang, Xuezhong: Un dispositivo de tensado de correa para una persiana hueca que comprende:
un asiento de soporte equipado con un engranaje de correa inferior en la porción superior […]
Motorreductor, del 6 de Junio de 2018, de e-mec S.R.L: Motorreductor.
Un motorreductor para transferir el movimiento generado por un órgano motor a un aparato que comprende un árbol motor, […]
Sistema y método para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 3 de Enero de 2018, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección […]
Tensor, del 14 de Diciembre de 2016, de Gates Corporation (a Delaware corporation): Un tensor que comprende:
una base ;
un primer montaje tensor montado en la base , comprendiendo el primer montaje tensor un primer brazo […]
Dispositivo tensor de correa para un accionamiento de correa y disposición de máquina con dispositivo tensor de correa, del 28 de Septiembre de 2016, de MUHR UND BENDER KG: Dispositivo tensor de correa para un mecanismo de correa, en el que el mecanismo de correa presenta al menos un equipo con una carcasa , un árbol de […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Dispositivo de tensado de correa para un persiana hueca, del 27 de Septiembre de 2018, de Zhang, Xuezhong: Un dispositivo de tensado de correa para una persiana hueca que comprende:
un asiento de soporte equipado con un engranaje de correa inferior en la porción superior […]
Dispositivo de tensado de correa para un persiana hueca, del 27 de Septiembre de 2018, de Zhang, Xuezhong: Un dispositivo de tensado de correa para una persiana hueca que comprende:
un asiento de soporte equipado con un engranaje de correa inferior en la porción superior […]