Manipulador con desacoplamiento de movimientos y aplicación a instrumentos para cirugía mini-invasiva.
Manipulador, que comprende:
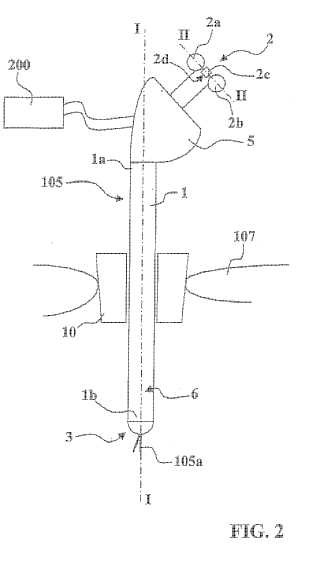
- un brazo principal (1), que tiene un extremo próximo (1a) y un extremo distal (1b),
- una estructura próxima de manipulación (2), soportada por el extremo próximo (1a) del brazo principal (1) a la que se une por una estructura de enlace (2e, 2f, 2g), que tiene, como mínimo, dos zonas de contacto opuestas (2a, 2b) conformadas para recibir el apoyo de dos partes opuestas de una mano de un operador (100), y que comprende captadores de solicitación (2c) apropiados para generar instrucciones de movimiento en función de solicitaciones de la mano del operador (100),
- una estructura distal controlada (3), soportada por el extremo distal (1b) del brazo principal (1), y móvil con respecto a dicho extremo distal (1b) según, como mínimo, dos grados de libertad de pivotamiento relativo transversal (7b),
-medios motores (5), alimentados por una fuente de energía (200), y apropiados para generar movimientos en función de las instrucciones de movimiento recibidas de la estructura próxima de manipulación (2),
-medios de transmisión mecánica (6), alojados en el brazo principal (1), acoplados mecánicamente a los medios motores (5) y aptos para transmitir los movimientos de los medios motores (5) a la estructura distal controlada (3) para generar los movimientos de la estructura distal controlada (3) en función de las instrucciones de movimiento de la estructura próxima de manipulación (2), caracterizado porque:
- la estructura distal controlada (3) es móvil con respecto a dicho extremo distal (1b), según un grado de libertad de rotación propia axial (9b);
- la estructura de enlace (2e, 2f, 2g) está dispuesta en una zona intermedia entre las zonas de contacto opuestas (2a, 2b) de la estructura próxima de manipulación (2),
- captadores de solicitación (2c) están dispuestos en dicha estructura de enlace (2e, 2f, 2g) y son apropiados para generar las instrucciones de movimiento de la estructura distal controlada (3) con respecto al brazo principal (1) según, como mínimo, dos grados de libertad de movimiento, en función de las solicitaciones detectadas en dicha estructura de enlace (2e, 2f, 2g) .
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2009/050390.
Solicitante: Dexterite Surgical.
Nacionalidad solicitante: Francia.
Dirección: 53 rue Carnot 74000 Annecy FRANCIA.
Inventor/es: GAUTIER, GERARD, BARRIER,Pascal, OLLAGNIER,Jérémy.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
PDF original: ES-2381572_T3.pdf
Fragmento de la descripción:
Manipulador con desacoplamiento de movimientos y aplicación a instrumentos para cirugía mini-invasiva SECTOR TÉCNICO DE LA INVENCIÓN
La presente invención se refiere a dispositivos de guiado y manipulación que permiten controlar, desde el exterior de una zona de intervención, los movimientos de un instrumento de manipulación situado en el interior de la zona de intervención.
En particular, la invención se refiere a un dispositivo de guiado y de manipulación que permite controlar un instrumento quirúrgico en aplicaciones de cirugía mini-invasiva practicadas con endoscopio.
En el curso de los años recientes, la técnica de la cirugía mini-invasiva con endoscopio se ha desarrollado considerablemente.
Para ello, se han concebido esencialmente dos tipos de dispositivos de guiado y de manipulación de instrumentos quirúrgicos.
Según el primer tipo de dispositivo de guiado y de manipulación, que se describe por ejemplo, en los documentos FR 2 713 129 A o FR 2 876 271 A, el instrumento quirúrgico es situado en el extremo de un manipulador portátil que tiene esencialmente un brazo principal con extremo próximo y extremo distal. El extremo próximo del brazo soporta una estructura próxima de manipulación, apropiada para generar instrucciones de movimiento en función de las solicitaciones de una mano de un operador. Una estructura distal es soportada por el extremo distal del brazo principal y es móvil con respecto a dicho extremo distal del brazo principal según, por lo menos, dos grados de libertad de pivotamiento transversal y, eventualmente, un grado de libertad de rotación axial. Los movimientos aplicados por el operador a la estructura próxima de manipulación son transmitidos por medios de transmisión en el brazo principal, y estos movimientos son reproducidos por la estructura distal controlada.
Cuando tiene lugar una operación quirúrgica, el brazo principal atraviesa la piel del paciente, la estructura próxima de manipulación queda en el exterior del cuerpo del paciente, encontrándose entonces la estructura distal controlada en el interior del cuerpo del paciente para realizar el movimiento quirúrgico.
En el dispositivo del documento FR 2 713 129 A, la estructura próxima de manipulación comprende zonas de contacto para recibir el apoyo de dos dedos del operador, estando dispuestas las zonas de contacto en el extremo de una palanca articulada en el extremo próximo del brazo principal por una articulación de rótula. La estructura distal controlada está dispuesta en el extremo de una palanca distal, que por su parte está articulada en el extremo distal en el brazo principal por una segunda articulación de rótula. Las dos rótulas están conectadas mecánicamente una a otra para realizar una reproducción de la rotación de la rótula próxima por la rótula distal.
Un primer inconveniente de este dispositivo es la dificultad de realizar un movimiento quirúrgico preciso. Efectivamente, se comprueba la dificultad de aplicar a la estructura próxima de manipulación solicitaciones que permitan reproducir de manera precisa movimientos de rotación pura o de traslación pura de la estructura distal controlada.
Un segundo inconveniente de este dispositivo es la relativa reducción del desplazamiento angular posible en los movimientos de pivotamiento del eje transversal de la estructura distal controlada.
En lo que respecta al dispositivo descrito en el documento FR 2 876 271 A, se encuentran los mismos inconvenientes.
Este documento describe, además, una forma de realización en la que la estructura próxima de manipulación está desplazada con separación del brazo principal, y la transmisión de los movimientos entre la estructura próxima de manipulación y la estructura distal controlada se hace con intermedio de medios motores alimentados por una fuente exterior de energía.
Según el segundo tipo de dispositivo de guiado y de manipulación para un instrumento quirúrgico tal como el descrito, por ejemplo, en el documento US 5.797.900 A, el instrumento quirúrgico es accionado por un robot telecontrolado. Un brazo maestro, accionable por el operador, está completamente separado de un brazo esclavo que lleva el instrumento quirúrgico. Habitualmente, el brazo principal o maestro y el brazo esclavo son brazos articulados que tienen como mínimo seis grados de libertad de desplazamiento, estando dotado el brazo maestro de captadores que detectan las solicitaciones que se aplican al mismo, y el brazo esclavo es solicitado mecánicamente por accionadores motorizados que responden a las señales emitidas por los captadores del brazo maestro. De esta manera, el enlace entre el brazo maestro y el brazo esclavo está asegurado por señales eléctricas, y el robot está situado generalmente a una cierta distancia del brazo maestro.
Otro ejemplo de manipulador con telecontrol según este segundo tipo de dispositivo de guiado y manipulación, se describe en el documento US 2003/0109957 A1. Este documento describe de manera más detallada una estructura próxima de manipulación en forma de una empuñadura conectada a un soporte fijo por cinco articulaciones sucesivas, cada una de las cuales está dotada de captadores de desplazamiento para controlar a distancia un brazo esclavo que soporta un instrumento quirúrgico. Partiendo del soporte fijo, la rotación de la "espalda" del brazo maestro controla el pivotamiento lateral del brazo esclavo alrededor del trocar en un primer plano longitudinal; la rotación del codo del brazo maestro controla el pivotamiento lateral del brazo esclavo alrededor del trocar, según un segundo plano longitudinal; la traslación axial del antebrazo maestro controla una traslación axial del brazo esclavo en el trocar; la rotación axial de la muñeca del brazo maestro controla una rotación axial del brazo esclavo en el trocar; finalmente, una rotación transversal de la empuñadura controla asimismo una rotación del brazo esclavo. Los captadores de desplazamiento están todos, a excepción del captador de rotación transversal de la empuñadura, situados en zonas de enlace que se encuentran netamente separadas de la empuñadura. Este dispositivo con articulaciones sucesivas no es aplicable a un manipulador portátil puesto que el brazo esclavo debe ser soportado entonces mecánicamente por la estructura próxima de manipulación, y las articulaciones no permiten este proceso. Además, en este documento, el instrumento quirúrgico no es móvil en orientación y en rotación con respecto al brazo esclavo.
Por su complejidad, dichos manipuladores con telecontrol son voluminosos, costosos y requieren costos de mantenimiento elevados. El operador acciona el brazo maestro en una posición alejada del paciente, de manera que el operador no puede actuar administrando un tratamiento médico rápido al paciente en caso de urgencia. Las dimensiones del sistema requieren un tiempo de preparación largo y una reorganización completa del quirófano y de los métodos de trabajo.
Se observará también que estos documentos describen una estructura distal controlada en la que el útil quirúrgico no puede ejecutar un movimiento de rotación propio axial alrededor de su eje, movimiento que es en algunos casos necesario en los actos quirúrgicos. Los actos quirúrgicos requieren entonces la intervención de varios movimientos según ejes distintos, cuyos movimientos deben ser simultáneos y sincronizados, lo que requiere medios de cálculo relativamente complejos, y que complica todavía más el dispositivo. El documento US 2003/0033024 describe un manipulador según el preámbulo de la siguiente reivindicación 1.
DESCRIPCIÓN DE LA INVENCIÓN
El problema propuesto por la presente invención es el de diseñar un nuevo tipo de manipulador que permita aumentar la precisión del movimiento quirúrgico sin necesitar no obstante dimensiones e inversiones importantes.
En particular, la invención se destina a realizar un aumento de la precisión del movimiento quirúrgico sin recurrir a un robot telecontrolado.
La invención resulta de la observación según la cual los manipuladores conocidos de tipo portátil no permiten discriminar de manera eficaz las diferentes solicitaciones de movimiento aplicadas a la estructura próxima de manipulación. En particular, una solicitación del tipo de pivotamiento relativo del eje transversal aplicada a la estructura próxima de manipulación induce, de manera general, no solo un movimiento de pivotamiento relativo similar del eje transversal de la estructura... [Seguir leyendo]
Reivindicaciones:
1. Manipulador, que comprende:
- un brazo principal (1) , que tiene un extremo próximo (1a) y un extremo distal (1b) ,
- una estructura próxima de manipulación (2) , soportada por el extremo próximo (1a) del brazo principal (1) a la que se une por una estructura de enlace (2e, 2f, 2g) , que tiene, como mínimo, dos zonas de contacto opuestas (2a, 2b) conformadas para recibir el apoyo de dos partes opuestas de una mano de un operador (100) , y que comprende captadores de solicitación (2c) apropiados para generar instrucciones de movimiento en función de solicitaciones de la mano del operador (100) ,
- una estructura distal controlada (3) , soportada por el extremo distal (1b) del brazo principal (1) , y móvil con respecto a dicho extremo distal (1b) según, como mínimo, dos grados de libertad de pivotamiento relativo transversal (7b) , -medios motores (5) , alimentados por una fuente de energía (200) , y apropiados para generar movimientos en función de las instrucciones de movimiento recibidas de la estructura próxima de manipulación (2) , -medios de transmisión mecánica (6) , alojados en el brazo principal (1) , acoplados mecánicamente a los medios motores (5) y aptos para transmitir los movimientos de los medios motores (5) a la estructura distal controlada (3) para generar los movimientos de la estructura distal controlada (3) en función de las instrucciones de movimiento de la estructura próxima de manipulación (2) , caracterizado porque:
- la estructura distal controlada (3) es móvil con respecto a dicho extremo distal (1b) , según un grado de libertad de rotación propia axial (9b) ;
- la estructura de enlace (2e, 2f, 2g) está dispuesta en una zona intermedia entre las zonas de contacto opuestas (2a, 2b) de la estructura próxima de manipulación (2) ,
- captadores de solicitación (2c) están dispuestos en dicha estructura de enlace (2e, 2f, 2g) y son apropiados para generar las instrucciones de movimiento de la estructura distal controlada (3) con respecto al brazo principal (1) según, como mínimo, dos grados de libertad de movimiento, en función de las solicitaciones detectadas en dicha estructura de enlace (2e, 2f, 2g) .
2. Manipulador, según la reivindicación 1, caracterizado porque la estructura de enlace (2e, 2f, 2g) comprende una articulación, y los captadores (2c) son captadores de desplazamiento sensibles al desplazamiento relativo del brazo principal (1) de la estructura próxima de manipulación (2) a un lado y otro de la articulación.
3. Manipulador, según la reivindicación 1, caracterizado porque la estructura de enlace (2e, 2f, 2g) es una estructura elásticamente deformable, y los captadores son galgas de esfuerzo sensibles a la deformación de la estructura de enlace (2e, 2f, 2g) .
4. Manipulador, según cualquiera de las reivindicaciones 1 a 3, caracterizado porque:
- la estructura próxima de manipulación (2) está desplazada radialmente con separación del eje longitudinal (I-I) del brazo principal (1) ,
- las zonas de contacto opuestas (2a, 2b) se encuentran, en posición media, alineadas según una dirección (II-II) que forma con el eje longitudinal (I-I) del brazo principal (1) un ángulo de 45º, aproximadamente,
- los captadores de solicitación (2c) dispuestos en la estructura de enlace (2e, 2f, 2g) , son apropiados para generar instrucciones de movimiento de la estructura distal controlada (3) , según los dos grados de libertad de pivotamiento relativo transversal (7b) y según el grado de libertad de rotación propia axial (9b) .
5. Manipulador, según cualquiera de las reivindicaciones 1 a 3, caracterizado porque:
- la estructura de enlace (2e, 2f, 2g) está centrada sobre el eje longitudinal (I-I) del brazo principal (1) ,
- los captadores de solicitación (2c) dispuestos en la estructura de enlace (2e, 2f, 2g) , son apropiados para generar las instrucciones de movimiento de la estructura distal controlada (3) , según los dos grados de libertad de pivotamiento relativo transversal (7b) ,
- los movimientos de rotación propia axial de la estructura distal controlada (3) son controlados por las instrucciones de movimiento generadas por un captador de solicitación suplementario (2j) , soportado por una estructura próxima de manipulación (2) , y accionable por un dedo de la mano del usuario que actúa sobre la estructura próxima de manipulación (2) .
6. Manipulador, según cualquiera de las reivindicaciones 1 a 5, caracterizado porque la estructura próxima de manipulación (2) comprende una superficie externa convexa de la que dos partes diametralmente opuestas constituyen dichas zonas de contacto opuestas (2a, 2b) .
7. Manipulador, según cualquiera de las reivindicaciones 1 a 5, caracterizado porque la estructura próxima de manipulación (2) comprende dos anillos coplanarios que constituyen dichas zonas de contacto opuestas (2a, 2b) y conectadas por un travesaño (2f) .
8. Manipulador, según cualquiera de las reivindicaciones 1 a 7, caracterizado porque comprende un elemento de
apoyo intermedio (10) del brazo principal (1) , en el que el brazo principal (1) puede deslizar axialmente (11) , y que puede pivotar, según un movimiento de pivotamiento global esférico (8b) .
9. Manipulador, según la reivindicación 8, caracterizado porque el brazo principal (1) puede tener además, con respecto al elemento de apoyo intermedio (10) , un movimiento de rotación global axial (6a) .
10. Manipulador, según una de las reivindicaciones 8 ó 9, caracterizado porque el elemento de apoyo intermedio es un trocar quirúrgico (10) que tiene medios de conexión a contactos deslizantes (10b) para transmitir la energía eléctrica y las señales entre el brazo principal (1) y un conjunto externo de alimentación y de tratamiento (200) .
11. Manipulador, según cualquiera de las reivindicaciones 1 a 10, caracterizado porque la estructura distal controlada (3) comprende un soporte distal (14) articulado en el extremo del brazo principal (1) , pudiendo oscilar a un lado y otro del eje longitudinal (I-I) del brazo principal (1) , según movimientos de pivotamiento relativo de dos grados de libertad con ejes transversales concurrentes, y que lleva un husillo rotativo porta-útil (15) apropiado para girar en rotación propia axial en el soporte distal (14) .
12. Manipulador, según la reivindicación 11, caracterizado porque los captadores de solicitación (2c) , los medios motores (5) y los medios de transmisión mecánica (6) están dispuestos de manera que:
- una solicitación de pivotamiento relativo centrado (7a) aplicada sobre la estructura próxima de manipulación (2) produce un pivotamiento relativo (7b) similar del soporte distal (14) de la estructura distal controlada (3) ,
- una solicitación de rotación propia axial (9a) aplicada sobre la estructura próxima de manipulación (2) produce una rotación relativa axial (9b) similar del husillo rotativo porta-útil (15) .
13. Manipulador, según cualquiera de las reivindicaciones 1 a 12, caracterizado porque la estructura distal controlada (3) comprende:
- en el extremo distal (1b) del brazo principal (1) , un elemento de articulación hembra (12) , con cavidad hemisférica distal (13) ,
- un elemento de articulación macho (14) en forma de valona hemisférica hueca, que tiene una superficie externa hemisférica (14a) , y un rebaje interior (14b) ampliamente abierto hacia su base (14c) ,
- estando dispuesto el elemento de articulación macho (14) en la cavidad hemisférica distal (13) del elemento de articulación hembra (12) , con su rebaje interior (14b) orientado hacia la cavidad hemisférica distal (13) ,
- una serie de cables de mando (23a, 23b) que se extienden en el brazo principal (1) , acoplados mecánicamente en los medios motores (5) , y acoplados en la periferia de la superficie externa hemisférica (14a) del elemento de articulación macho (14) para controlar el pivotamiento por tracción sobre los cables de mando (23a, 23b) ,
- un árbol de salida (15) , montado con capacidad de rotación en un cojinete radial (16) del elemento de articulación macho (14) y que lleva un útil (105a) o un porta-útil (105b) ,
- un árbol de entrada (17) , montado con capacidad de rotación en un cojinete axial (18) del elemento de articulación hembra (12) , y acoplado longitudinalmente en el brazo principal (1) ,
- una transmisión homocinética (19) que conecta el árbol de entrada (17) al árbol de salida (15) autorizando los movimientos de pivotamiento transversal del elemento de articulación macho (14) en el elemento de articulación hembra (12) .
14. Manipulador, según la reivindicación 13, caracterizado porque los cables de mando (23a, 23b) atraviesan los pasos longitudinales de guiado periférico (24a, 24b) a su entrada en el elemento de articulación hembra (12) .
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]