Dispositivo de examen por rayos X de ruedas.
Dispositivo de examen por rayos X de una rueda (40), con una unidad (60,
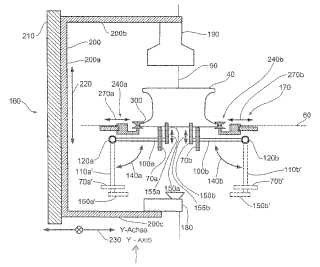
70a, 70b) para alimentar la rueda (40) en una dirección (50) de transporte en un plano (80) de transporte a un lugar de examen situado en el plano de transporte y para retirar la rueda (40) del lugar de examen en la dirección (50) de transporte en el plano (80) de transporte, de tal manera, que la rueda durante la alimentación al lugar de examen así como durante la retirada del lugar de examen permanece en el plano de transporte;
una unidad (170) para manipular la rueda (40) en el lugar de examen, presentando la unidad de manipulación las siguientes características:
una unidad (240a, 240b, 250a, 260a, 250b, 260b) para agarrar la rueda (40) en el lugar de examen;
una unidad (250a, 260a, 250b, 260b) para girar la rueda (40) alrededor de un eje de rotación de la rueda (40); y una unidad para hacer pivotar la rueda (40) alrededor de un eje de pivote, situado esencialmente en el plano de transporte, una unidad (160) de rayos X con un emisor (180) de rayos X y un detector (190) de rayos X para irradiar la rueda (40) en el lugar de examen, que definen una trayectoria de los rayos, que discurre perpendicular al plano de transporte, estando adaptada la unidad (160) de rayos X de tal manera, que la trayectoria de los rayos puede desplazarse lateralmente a lo largo de un plano perpendicular a la trayectoria de los rayos, y una unidad (100a, 100b, 110a, 110b, 120a, 120b) para mover la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) a una primera posición y una segunda posición, estando dispuesta la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) en la primera posición, para transportar la rueda (40), y estando dispuesta en la segunda posición, para liberar la trayectoria de los rayos y posibilitar el pivotado de la rueda (40) a través de la unidad de pivotado de la unidad (170) de manipulación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2002/011644.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: HANKE,Randolf, WENZEL,Thomas, Stone,Ashley.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01N23/18 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 23/00 Investigación o análisis de materiales mediante la utilización de radiaciones de ondas o partículas, p. ej. rayos X o neutrones, no cubiertos por los grupos G01N 3/00 - G01N 17/00, G01N 21/00 o G01N 22/00. › Investigación de la presencia de defectos o de material extraño.
PDF original: ES-2378423_T3.pdf
Fragmento de la descripción:
Dispositivo de examen por rayos x de ruedas.
La presente invención se refiere al examen por rayos X de ruedas, como por ejemplo ruedas de metal ligero.
Las ruedas, como por ejemplo las ruedas de metal ligero, representan elementos de seguridad, que por parte de los fabricantes o empresas de servicios se examinan en un 100 por cien o en toda su extensión en búsqueda de posibles defectos. Esto se produce en sistemas de examen por rayos X completamente automáticos o semiautomáticos utilizando rayos X. La rueda se coloca para ello entre un emisor de rayos X y un detector de rayos X y con ayuda de un sistema de manipulación se coloca en diferentes posiciones u orientaciones, para poder cubrir todo el volumen de la pieza sometida a examen durante un proceso de examen.
La problemática especial durante la manipulación de la rueda consiste por un lado en llevar a cabo una colocación segura y relativamente exacta de la rueda que va a examinarse o de la pieza de rueda en bruto durante el proceso de examen, y por otro lado en alcanzar una velocidad de colocación elevada, para que el tiempo de examen, es decir el periodo de tiempo necesario para el proceso de examen, sea lo más reducido posible.
En la actualidad, para el examen por rayos X de ruedas se utilizan sistemas que esencialmente se basan en dos técnicas diferentes. Los sistemas que se basan en la técnica de mordazas comprenden un sistema transportador, como por ejemplo una cinta de rodillos, un manipulador o una unidad de manipulación con un sistema de agarre y un dispositivo de rayos X compuesto por un tubo de rayos X y un detector de rayos X. La rueda se hace pasar por el sistema transportador a través de la instalación de examen. El tubo de rayos X y el detector de rayos X se encuentran sobre el nivel de transporte o el plano de transporte definido a través del sistema transportador. La dirección de los rayos entre el tubo de rayos X y el detector de rayos X discurre paralela a la dirección de desplazamiento o de transporte. El manipulador utiliza cuatro ejes, con respecto a los cuales puede variarse la posición de la rueda durante un examen, es decir, un eje Y que discurre perpendicular a la dirección de transporte paralelo al plano de transporte, para el desplazamiento lateral de la rueda, un eje Z o eje vertical, que se encuentra perpendicular sobre el plano de transporte, para elevar la rueda desde y depositar la rueda sobre el sistema transportador, un eje de pivote p, que discurre a lo largo del eje Y, para girar la rueda alrededor del eje Y, y un eje de rotación w de la rueda para girar la rueda o pieza sometida a examen alrededor de su eje de rotación. Los ejes de rotación y de giro se realizan mediante el sistema de agarre, que está montado en el manipulador, para poder desplazarse a lo largo del eje Y y Z. La mordaza está compuesta según su diseño por cuatro engranajes cónicos, que agarran la rueda por la pestaña de la llanta de la rueda que va a someterse a examen al nivel de transporte o en el plano de transporte y mediante elevación y pivotado la colocan en la trayectoria de los rayos entre el tubo de rayos X y el detector de rayos X. Mediante el desplazamiento del sistema de agarre a lo largo de los ejes de transacción Y y Z así como mediante el giro alrededor del eje de pivote p se realizan diferentes posiciones o posiciones de examen, en las que se gira la rueda con el eje de rotación w. Según el tipo de funcionamiento, es decir un funcionamiento completamente automático o semiautomático, se ajustan los ángulos de visibilidad individuales o el ángulo de la trayectoria de los rayos con respecto a la rueda, mediante la aproximación continua o, en el marco de un modo interrumpido, la aproximación incremental de los diferentes ángulos de rotación w. Tras el examen la rueda se deja de nuevo sobre el sistema transportador o de transporte y a continuación se retira. Para ello, la mordaza tiene que desplazarse en la dirección vertical, para liberar el trayecto de transporte.
Un segundo tipo de sistema se basa en una técnica de transporte por cadenas. En estos sistemas, el sistema transportador y el sistema de agarre están agrupados en un sistema de cadenas. Dos cadenas circulantes, que agarran la rueda lateralmente por la pestaña inferior de la rueda, asumen por un lado el transporte de la rueda a través de la instalación de examen, por otro lado realizan el eje X del manipulador, que corresponde al eje Z de los sistemas descritos anteriormente. Como el eje de los rayos discurre en vertical, es decir, perpendicular al plano de transporte, y así perpendicular a la dirección de transporte, el transporte por cadenas puede asumir además la función del eje de giro w. En este caso las cadenas se mueven en direcciones contrarias u opuestas. Para realizar un eje de pivote p el emisor de rayos X y el detector de rayos X están montados opuestos entre sí en una estructura en forma de C, que posibilita un giro de la trayectoria de los rayos definida por el emisor de rayos X y el detector alrededor del eje de dirección de transporte. Para realizar un desplazamiento lateral a lo largo del eje Y, o bien se desplaza la estructura en forma de C a lo largo del plano de transporte perpendicular a la dirección de transporte, mientras que no se mueve el transportador de cadenas, o a la inversa.
Una desventaja de los sistemas basados en la técnica de mordaza consiste en que para la elevación y deposición de la rueda que va a someterse a examen desde o sobre el sistema de transporte es necesario un esfuerzo considerable desde el punto de vista mecánico y del tiempo.
Una desventaja de los sistemas basados en la técnica de transporte por cadenas consiste en que en estos sistemas existe el riesgo de que la rueda se salga de las dos cadenas circulantes del sistema de cadenas. Esta salida está provocada por ejemplo por rebabas de fundición o tensiones de cadenas que ceden y puede llevar a que la rueda que va a someterse a examen abandone zona de examen o la instalación de examen. Por consiguiente no se garantiza un examen estable en estos sistemas. Además, estos sistemas, por la necesidad de un giro de la trayectoria de los rayos alrededor de la dirección de transporte por medio de la estructura en forma de C ocupan mucho espacio, y el intervalo de pivotado está limitado según el diseño de la estructura en forma de C a menos de 360º .
El documento US 4.949.366 se refiere al examen por rayos X de neumáticos de vehículos. Los neumáticos que van a someterse a examen se transportan sobre rodillos giratorios de un transportador hacia unidades transportadoras pivotantes, que descargan por basculación los neumáticos que van a someterse a examen con respecto a un eje desde su plano de transporte, tal como se define mediante el transportador. En esta posición de examen vertical se irradian desde el centro con un tubo de rayos X que puede desplazarse en la dirección horizontal, captándose la radiación por fuera del neumático mediante diodos. También está previsto un giro de la rueda alrededor de su eje durante la irradiación. Tras el examen los neumáticos vuelven a colocarse mediante pivotado sobre el plano de transporte y se retiran mediante una sección 1 de retirada.
El documento US 4.809.308 describe un procedimiento y un dispositivo para la realización de un control de calidad de puntos de soldadura de placas de circuito impreso. Una placa de circuito impreso que debe comprobarse se coloca sobre un dispositivo de traslación, para desplazarse a través de una puerta en el interior de una carcasa bajo una fuente de rayos X, que a continuación irradia la placa en la dirección de una cámara. En el dispositivo de traslación existe una mesa de colocación en X-Y para poder mover la placa durante la irradiación transversalmente a la dirección de irradiación. La mesa está situada sobre una mesa de rotación, que posibilita un giro de 360 grados de la mesa. Además está prevista la posibilidad de hacer bascular la disposición compuesta por mesa de rotación, de colocación y dispositivo de traslación desde la horizontal a un plano inclinado así como la posibilidad de desplazar la disposición en la dirección Z. Tras haber realizado el examen la placa se retira de nuevo desde la abertura.
El documento JP 60-104240 describe un dispositivo de examen por rayos X para neumáticos. Los neumáticos que van a someterse a examen se transportan sobre un trayecto de transporte hacia una base de recepción de neumáticos, aquí se captan por un dispositivo de desplazamiento y deposición, se elevan, se desplazan a un lugar de examen y aquí se bajan de nuevo a una posición de examen, en la que una fuente de rayos... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de examen por rayos X de una rueda (40) , con una unidad (60, 70a, 70b) para alimentar la rueda (40) en una dirección (50) de transporte en un plano (80) de transporte a un lugar de examen situado en el plano de transporte y para retirar la rueda (40) del lugar de examen en la dirección (50) de transporte en el plano (80) de transporte, de tal manera, que la rueda durante la alimentación al lugar de examen así como durante la retirada del lugar de examen permanece en el plano de transporte;
una unidad (170) para manipular la rueda (40) en el lugar de examen, presentando la unidad de manipulación las siguientes características:
una unidad (240a, 240b, 250a, 260a, 250b, 260b) para agarrar la rueda (40) en el lugar de examen;
una unidad (250a, 260a, 250b, 260b) para girar la rueda (40) alrededor de un eje de rotación de la rueda (40) ; y una unidad para hacer pivotar la rueda (40) alrededor de un eje de pivote, situado esencialmente en el plano de transporte, una unidad (160) de rayos X con un emisor (180) de rayos X y un detector (190) de rayos X para irradiar la rueda (40) en el lugar de examen, que definen una trayectoria de los rayos, que discurre perpendicular al plano de transporte, estando adaptada la unidad (160) de rayos X de tal manera, que la trayectoria de los rayos puede desplazarse lateralmente a lo largo de un plano perpendicular a la trayectoria de los rayos, y una unidad (100a, 100b, 110a, 110b, 120a, 120b) para mover la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) a una primera posición y una segunda posición, estando dispuesta la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) en la primera posición, para transportar la rueda (40) , y estando dispuesta en la segunda posición, para liberar la trayectoria de los rayos y posibilitar el pivotado de la rueda (40) a través de la unidad de pivotado de la unidad (170) de manipulación.
2. Dispositivo según la reivindicación 1, en el que el eje de pivote es perpendicular a la dirección (50) de transporte.
3. Dispositivo según una de las reivindicaciones 1 a 2, en el que la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) presenta una unidad (70a) transportadora sin fin para transportar la rueda (40) en la dirección (50) de transporte, que está fijada en un extremo libre de un brazo (100a) pivotante, que puede pivotar en dos posiciones, posibilitándose en la primera posición un transporte de la rueda (40) a través de la unidad (70a) transportadora sin fin y en la segunda posición el pivotado de la rueda (40) a través de la unidad de pivotado de la unidad (170) de manipulación.
4. Dispositivo según la reivindicación 3, en el que la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) presenta una unidad (70b) transportadora sin fin adicional, que está fijada en un extremo libre de un brazo (110b) pivotante adicional, estando montados los brazos (110a, 110b) pivotantes de manera que pueden girar alrededor de ejes (130a, 130b) de basculación, que son paralelos a la dirección (50) de transporte y están distanciados entre sí.
5. Dispositivo según una de las reivindicaciones 1 a 3, en el que la unidad (170) de manipulación presenta las siguientes características:
dos mordazas (240a, 240b) , que están montadas de manera que pueden pivotar alrededor del eje de pivote, se oponen en una dirección del eje de pivote y en cada caso presentan dos engranajes (250a, 260a, 250b, 260b) cónicos, que están previstos para engranarse con una pestaña (300) de la llanta de la rueda (40) .
6. Dispositivo según la reivindicación 5, en el que la unidad (170) de manipulación presenta además la siguiente característica:
un primer accionamiento para hacer pivotar una de las dos mordazas (240a, 240b) alrededor del eje (290) de pivote.
7. Dispositivo según la reivindicación 5 ó 6, en el que la unidad de manipulación presenta además la siguiente característica:
un segundo accionamiento para accionar los engranajes (250a, 260a, 250b, 260b) cónicos de una de las dos mordazas (240a, 240b) .
8. Dispositivo según una de las reivindicaciones 5 a 7, en el que las mordazas (240a, 240b) pueden desplazarse en una dirección del eje (290) de pivote a una primera y una segunda posición, para en la primera posición posibilitar la alimentación y retirada de la rueda (40) a través de la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) , y para en la segunda posición engranar los engranajes (250a, 260a, 250b, 260b) cónicos de las mordazas (240a, 240b) con la pestaña (300) de la llanta de la rueda (40) .
9. Procedimiento para controlar un dispositivo de examen por rayos X de una rueda (40) , que comprende una unidad (160) de rayos X con un emisor (180) de rayos X y un detector (190) de rayos X para irradiar la rueda (40) en un lugar de examen situado en el plano de transporte, y que define una trayectoria de los rayos, que discurre perpendicular al plano de transporte, con las etapas siguientes:
alimentar la rueda (40) en una dirección (50) de transporte en el plano (80) de transporte al lugar de examen y retirar la rueda (40) del lugar de examen en la dirección (50) de transporte en el plano (80) de transporte por medio de una unidad (60, 70a, 70b) de alimentación y retirada, de tal manera que la rueda durante la alimentación al lugar de examen así como durante la retirada del lugar de examen permanece en el plano de transporte;
manipular la rueda (40) en el lugar de examen, presentando la manipulación las etapas siguientes:
agarrar la rueda (40) en el lugar de examen;
girar la rueda (40) alrededor de un eje de rotación de la rueda (40) ; y hacer pivotar la rueda (40) alrededor de un eje de pivote, que se sitúa esencialmente en el plano (80) de transporte, estando adaptada la unidad (160) de rayos X de tal manera, que la trayectoria de los rayos puede desplazarse lateralmente a lo largo de un plano perpendicular a la trayectoria de los rayos; e irradiar la rueda (40) con rayos X y detectar la radiación mover la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) a una primera posición y una segunda posición, estando dispuesta la unidad (60, 70a, 70b) para alimentar y retirar la rueda (40) en la primera posición, para transportar la rueda (40) , y estando dispuesta en la segunda posición, para liberar la trayectoria de los rayos y posibilitar el pivotado de la rueda (40) durante la manipulación.
Patentes similares o relacionadas:
Procedimiento y aparato para la inspección no destructiva de frutas que tienen un eje de simetría rotacional, del 15 de Julio de 2020, de MICROTEC, S.R.L: Un procedimiento para la inspección no destructiva de una fruta que tiene un eje de simetría rotacional, que comprende los pasos de: […]
Procedimiento y sistemas pasivos y activos combinados para detectar y medir fallas internas dentro de raíles metálicos, del 17 de Junio de 2020, de Railpod Inc: Un dispositivo de inspección de vías que comprende: un vehículo ferroviario ; uno o más magnetómetros pasivos en una […]
Control y selección de calidad automatizados, del 13 de Noviembre de 2019, de KATHOLIEKE UNIVERSITEIT LEUVEN: Un método de inspección no destructiva para la inspección en línea de un objeto, comprendiendo el método de inspección no destructiva: - mover usando un sistema […]
Dispositivo de prueba para determinar la calidad del cuero, del 4 de Abril de 2018, de Wollsdorf Leder Schmidt & Co. Ges.m.b.H: Dispositivo de prueba para determinar la calidad del cuero en la producción de cuero, estando configurado el dispositivo de prueba para someter a prueba una […]
Procedimiento y aparato para inspección externa de soldadura de tubería, del 7 de Enero de 2015, de SHAWCOR LTD.: Aparato para inspección externa de una soldadura circunferencial de tubería que comprende un carril para sujeción alrededor de la tubería, y una fuente de radiación y […]
Aparato de inspección de rayos X para la inspección de soldaduras circunferenciales de tuberías, del 19 de Marzo de 2014, de SHAWCOR LTD.: Un aparato de inspección de rayos X para inspeccionar soldaduras circunferenciales de tubería en una tubería que presenta una pared de tubería y que comprende una […]
 Procedimiento y dispositivo para el control en tiempo real de uniones por juntura con radiación de rayos X y evaluación de la escala de grises, del 2 de Julio de 2013, de FORSCHUNGSZENTRUM JULICH GMBH: Procedimiento para el control de una unión por juntura, con el que se unen entre sí dos piezas , y,durante la unión, unas zonas de las dos piezas […]
Procedimiento y dispositivo para el control en tiempo real de uniones por juntura con radiación de rayos X y evaluación de la escala de grises, del 2 de Julio de 2013, de FORSCHUNGSZENTRUM JULICH GMBH: Procedimiento para el control de una unión por juntura, con el que se unen entre sí dos piezas , y,durante la unión, unas zonas de las dos piezas […]