Controlador para vehículo eléctrico.
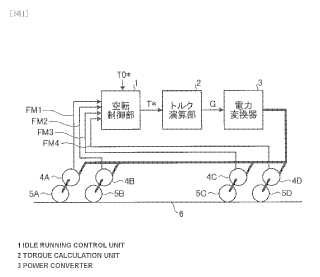
Dispositivo de control para vehículo eléctrico ferroviario, el dispositivo de control incluyendo una pluralidad demotores eléctricos (4a-4d) y una unidad de control del patinaje/deslizamiento (1) que genera un valor de ordende par con el fin de inhibir un patinaje o deslizamiento en base a las velocidades de rotación de la pluralidad demotores eléctricos.
en el que la unidad de control del patinaje/deslizamiento incluye:
un calculador de velocidad de rotación de referencia (12) que calcula una primera velocidad de rotación dereferencia (MIN) y una segunda velocidad de rotación de referencia (MAX) utilizando las velocidades derotación de la pluralidad de motores eléctricos;
primeras unidades generadoras de índices de nivel de adherencia (7A-7D) que se proporcionan encorrespondencia con los motores eléctricos. respectivamente, y cada una de las primeras unidadesgeneradoras de indices de nivel de adherencia (7A-7D) recibe, como entrada, la primera velocidad derotación de referencia (MIN) y la velocidad de rotación (FM1-FM4) de uno de los motores eléctricoscorrespondiente y genera un primer índice de nivel de adherencia (ADLO) que es un índice para un nivel deadherencia entre una rueda que está conectada al motor eléctrico correspondiente y una superficie que espisada por la rueda, en base a una desviación de aceleración (DFT) que es una diferencia entre unaaceleración (A1). calculada utilizando la velocidad de rotación (FM1-FM4) del motor eléctricocorrespondiente y una aceleración (Al), calculada usando la primera velocidad de rotación de referencia(MIN) y en base a una desviación de la velocidad (DFM) que es una diferencia entre la velocidad de rotación(FM1-FM4) del motor .::Iéctrico correspondiente y la primera velocidad de rotación de referencia (MIN);una segunda unidad generadora de índices de nivel de adherencia que recibe, como una entrada, lavelocidad de rotación de referencia y genera un segundo valor de índice de nivel de adherencia (ADL)multiplicando el primer valor de indice de nivel de adherencia (ADLO) por una ganancia (54) que se hagenerado sobre la base de una aceleración (S1), calculada usando la segunda velocidad de rotación dereferencia (MAX), y
25 una unidad generadora de valores de orden de par (27) que genera el valor de orden de par basado en elsegundo valor de indice de nivel de adherencia.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2007/062930.
Solicitante: MITSUBISHI ELECTRIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 7-3, MARUNOUCHI 2-CHOME CHIYODA-KU TOKYO 100-8310 JAPON.
Inventor/es: KITANAKA,Hidetoshi, YABUUCHI,Masataka, NAKATSU,Keiji.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L9/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 9/00 Propulsión eléctrica a partir de energía externa al vehículo (propulsión eléctrica para vehículos mono rail, vehículos suspendidos o ferrocarriles de cremallera B60L 13/00; en combinación con baterías o pilas de combustible en el vehículo B60L 50/53). › alimentados por líneas de corriente alterna.
- H02P5/50 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 5/00 Disposiciones especialmente adaptadas para la regulación o el control de la velocidad o del par de dos o más motores eléctricos (H02P 6/04, H02P 8/40 tienen prioridad). › por comparación de los valores eléctricos que representan las velocidades.
PDF original: ES-2385096_T3.pdf
Fragmento de la descripción:
Controlador para vehiculo eléctrico
CAMPO TÉCNICO
La presente invención se refiere en general a un dispositivo de control para vehículos eléctricos ferroviarios y, específicamente, se refiere a un dispositivo de control para vehlculos eléctricos ferroviarios que tiene una función de control del patinaje/deslizamiento para evitar que las ruedas giren libremente y se deslicen.
TÉCNICA ANTERIOR
Como dispositivo de control para los vehículos eléctricos ferroviarios, ya se han puesto en práctica sistemas que accionan y controlan un motor de corriente alterna utilizando un inversor. Como es bien sabido, las aceleraciones y desaceleraciones de los vehículos ferroviarios se realizan por las energías que se transmiten entre los railes de hierro y las ruedas de hierro dentro de pequeñas áreas de contacto. Así, un díspositivo de control para vehículos eléctricos ferroviarios necesita controlar el par del motor eléctrico de una forma adecuada para que las ruedas no giren libremente. En otras palabras, si el par es demasiado alto. las ruedas giran libres y se reduce el coeficiente de fricción (en adelante, también puede ser denominado "coeficiente de adherencia") entre las ruedas y los raíles, por lo que la eficiencia de transmisión de las energías también se reduce. Como resultado, surgen problemas cuando los vehículos eléctricos ferroviarios no pueden acelerarse de una manera satisfactoria y cuando las ruedas y los raíles se desgastan. A la inversa, si el par es demasiado bajo, aunque las ruedas no giren libres, los vehículos eléctricos ferroviarios no pueden acelerarse de manera satisfactoria, y se hace dificil para los vehiculos eléctricos ferroviarios viajar cumpliendo el horario. Lo mismo es aplicable cuando se utiliza un freno regenerativo.
Convencionalmente, los dispositivos de control para vehículos eléctricos ferroviarios tienen un sistema de control del patinaje para impedir el fenómeno del patinaje de las ruedas como se ha descrito anteriormente. En términos generales, este sistema de control del patinaje se configura de tal manera que determine un estado de patinaje de las ruedas utilizando tasas de cambio de las velocidades de las ruedas y una desviación de la velocidad entre una pluralidad de ruedas y para ajustar el par del motor eléctrico. Puede haber, sin embargo, algunas sustancias tales como lluvia, nieve, arena y grasa entre los raíles y las ruedas. Además, el coeficiente de adherencia cambia mucho constantemente según el estado de las superficies de los raíles y las ruedas, la temperatura, y la velocidad de desplazamiento de los vehículos eléctricos ferroviarios. Por lo tanto, los fenómenos físicos de los raíles y las ruedas son complejos y no es fácil formular una ley de control. Por esta razón, se ha propuesto un gran número de métodos que pueden ser utilizados por los sistemas de control del patinaje basados en estudios teóricos de diversos aspectos y datos a partir de pruebas realizadas utilizando vehiculos eléctricos ferroviarios reales (véase, por ejemplo, el documento de patente 1) .
Documento de patente 1: Solicitud de patente japonesa pública N° H06-335106
La patente US 4896090A puede considerarse el estado de la técnica más relevante. Esta patente describe un método de control del patinaje de las ruedas para un sistema de propulsión locomotora, con las características interrelacionadas siguientes: comparación de /as velocidades de rotación de las ruedas motrices de la locomotora por separado y detección de la más alta y la más baja; provisión de un valor de velocidad de referencia indicativa de la velocidad de rotación de una rueda que no patine; determinación de una diferencia máxima deseada entre la velocidad de referencia y una seleccionada de las velocidades detectadas; derivación de un valor de error de velocidad mediante la suma de la velocidad de referencia, la velocidad seleccionada y la diferencia máxíma; obtención de un valor de corrección del patinaje de las ruedas en función del valor de error de velocidad; y finalmente reducción de la magnitud de la tensión aplicada a los motores de tracción de la locomotora según el valor de corrección.
DESCRIPCIÓN DE LA INVENC!ÓN
PROBLEMA PARA RESOLVER POR LA INVENCiÓN
Las técnicas convencionales descritas anteriormente, sin embargo, tienen los siguientes problemas: En los sistemas ferroviarios normales, tales como los trenes de cercanías en Japón, es fácil reconocer el fenómeno de patinaje/deslizamiento en base a las tasas de cambio de las velocidades de las ruedas y la desviación de velocidad entre una pluralidad de ruedas, debido a que las tasas de cambío de la velocidades de las ruedas son relativamente altas, y además, la desviación de la velocidad entre las ruedas es también relativamente grande cuando las ruedas giran libres o se deslizan. Sin embargo, mientras que un vehículo eléctrico ferroviario está funcionando a una velocidad alta (por ejemplo, aproximadamente 200 kilómetros por hora o más) en un sistema de tren de alta velocidad, las tasas de cambio de velocidades de las ruedas son bajas, y la desviación de la velocidad entre una pluralidad de ruedas también es pequeña cuando se produce un patinaje/deslizamiento. Así, sigue habiendo un problema en el que es dificil reconocer un fenómeno de patinaje/deslizamiento en base a las tasas de cambio de las velocidades de las ruedas y la desviación de la velocidad entre las ruedas y es dificil distinguir una situación en la que el vehiculo eléctrico ferroviario se encuentra en un estado de aceleración durante un viaje normal a partir de una situación en la que se produce un patinaje/deslizamiento. '
En vista de los problemas descritos anteriormente, la presente invención tiene por objeto proporcionar un dispositivo de control para un vehículo eléctrico ferroviario, el dispositivo de control siendo capaz de detectar el fenómeno de patinaje/deslizamiento durante, en particular, un viaje de alta velocidad y ejercer el control sobre el patinaje/deslizamiento de una forma adecuada.
MEDIOS PARA RESOLVER EL PROBLEMA
Con el fin de resolver los problemas antes mencionados, se construye un dispositivo de control para vehículo eléctrico ferroviario según un aspecto de la presente invención de tal manera que incluye una pluralidad de motores eléctricos y una unidad de control del patinaje/deslizamiento que genera un valor de orden de par motor con el fin de inhibir un patinaje o deslizamiento en base a las velocidades de rotación de la pluralidad de motores eléctricos, en donde la unidad de control del patinaje/deslizamiento incluye: un calculador de velocidad de rotación de referencia que calcula una primera velocidad de rotación de referencia y una segunda velocidad de rotación de referencia utilizando las velocidades de rotación de la pluralidad de motores eléctricos; primeras unidades generadoras de índices de nivel de adherencia que se proporcionan en correspondencia con los motores eléctricos, respectivamente, y cada una de las primeras unidades generadoras de índices de nivel de adherencia recibe, como entrada, la primera velocidad de rotación de referencia y la velocidad de rotación de uno de los motores eléctricos correspondiente y genera un primer índice de nivel de adherencia que es un índice para un nivel de adherencia entre una rueda que está conectada al motor eléctrico correspondiente y una superficie que es pisada por la rueda, en base a una desviación de la aceleración que es una diferencia entre una aceleración calculada utilizando la velocidad de rotación del motor eléctrico correspondiente y una aceleración calculada utilizando la primera velocidad de rotación de referencia y en base a una desviación de la velocidad que es una diferencia entre la velocidad de rotación del motor eléctrico correspondiente y la primera velocidad de rotación de referencia; una segunda unidad generadora de índices de nivel de adherencia que recibe, como entrada, la velocidad de rotación de referencia y genera un segundo valor de indice de nivel de adherencia multiplicando el primer valor de índice de nivel de adherencia por una ganancia que se ha generado en base a una aceleración calculada utilizando la segunda velocidad de rotación de referencia; y una unidad generadora de valores de orden de par motor que genera el valor de orden de par en base al segundo valor del índice de adherencia.
EFECTO DE LA INVENCiÓN
Según un aspecto de la presente invención, incluso en la situación en la que se produce un patinaje o deslizamiento durante el viaje a alta velocidad... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de control para vehículo eléctrico ferroviario, el dispositivo de control incluyendo una pluralidad de motores eléctricos (4a-4d) y una unidad de control del patinaje/deslizamiento (1) que genera un valor de orden de par con el fin de inhibir un patinaje o deslizamiento en base a las velocidades de rotación de la pluralidad de motores eléctricos. en el que la unidad de control del patinaje/deslizamiento incluye:
un calculador de velocidad de rotación de referencia (12) que calcula una primera velocidad de rotación de referencia (MIN) y una segunda velocidad de rotación de referencia (MAX) utilizando las velocidades de rotación de la pluralidad de motores eléctricos; primeras unidades generadoras de índices de nivel de adherencia (7A-7D) que se proporcionan en correspondencia con los motores eléctricos. respectivamente, y cada una de las primeras unidades generadoras de indices de nivel de adherencia (7A-7D) recibe, como entrada, la primera velocidad de rotación de referencia (MIN) y la velocidad de rotación (FM1-FM4) de uno de los motores eléctricos correspondiente y genera un primer índice de nivel de adherencia (ADLO) que es un índice para un nivel de adherencia entre una rueda que está conectada al motor eléctrico correspondiente y una superficie que es pisada por la rueda, en base a una desviación de aceleración (DFT) que es una diferencia entre una aceleración (A1) . calculada utilizando la velocidad de rotación (FM1-FM4) del motor eléctrico correspondiente y una aceleración (Al) , calculada usando la primera velocidad de rotación de referencia (MIN) y en base a una desviación de la velocidad (DFM) que es una diferencia entre la velocidad de rotación (FM1-FM4) del motor .::Iéctrico correspondiente y la primera velocidad de rotación de referencia (MIN) ; una segunda unidad generadora de índices de nivel de adherencia que recibe, como una entrada, la velocidad de rotación de referencia y genera un segundo valor de índice de nivel de adherencia (ADL) multiplicando el primer valor de indice de nivel de adherencia (ADLO) por una ganancia (54) que se ha generado sobre la base de una aceleración (S1) , calculada usando la segunda velocidad de rotación de referencia (MAX) , y una unidad generadora de valores de orden de par (27) que genera el valor de orden de par basado en el segundo valor de indice de nivel de adherencia.
2. Dispositivo de control para vehículo eléctrico ferroviario según la reivindicación 1. en el que la unidad de control del patinaje/deslizamiento (1) incluye además una unidad de procesamiento del índice de nivel de adherencia que calcula un único índice de nivel de adherencia (ADL 1-ADL4) usando la pluralidad de primeros indices de nivel de adherencia que han sido generados por la pluralidad de unidades generadoras de indices de nivel de adherencia (7A-7D) , respectivamente. y que emite el único indice de nivel de adherencia (ADLO) a la segunda unidad generadora de índices de nivel de adherencia (8) , como el primer índice de nivel de adherencia (ADLO) , y los pares de la pluralidad de motores eléctricos se controlan colectivamente. en base al segundo valor de índice de nivel de adherencia (ADL) que ha sido generado por la segunda unidad generadora de índices de nivel de adherencia (8) multiplicando el único indice de nivel de adherencia (ADLO) por la ganancia (54) .
3. Dispositivo de control para vehículo eléctrico ferroviario según cualquiera de las reivindicaciones anteriores. en el que cada una de las primeras unidades generadoras de índices de nivel de adherencia (7A-7D) incluye un primer calculador de aceleración (29) que calcula la aceleración (A 1) usando la velocidad de rotación del motor eléctrico correspondiente, y también, calcula la aceleración (Al) usando la primera velocidad de rotación de referencia (MI N) , la segunda unidad generadora de índices de nivel de adherencia (8) incluye un segundo calculador de aceleración (32) que calcula la aceleración (S1) usando la segunda velocidad de rotación de referencia (MAX) .
y se configura una velocidad de respuesta de la aceleración (51) , calculada por el segundo calculador de aceleración (32) . para que sea menor que una velocidad de respuesta de la aceleración calculada por el primer calculador de aceleración (29) .
4. Dispositivo de control para vehículo eléctrico ferroviario según cualquiera de las reivindicaciones anteriores, en
el que la segunda unidad generadora de indices de nivel de adherencia cambia un valor de la ganancia (54) dependiendo de si la aceleración (S1, S2) , calculada usando la segunda velocidad de rotación de referencia (MAX) es mayor que un valor predeterminado (SSET) y, en el caso en el que la aceleración (S1. S2) sea mayor que el valor predeterminado, la ganancia (S4) se configura en un valor más pequeño.
5. Dispositivo de control para vehículo eléctrico ferroviario según cualquiera de las reivindicaciones anteriores. en el que en la segunda unidad generadora de índices de nivel de adherencia. se cambia un valor de la ganancia (54) mientras se usa un primer valor predeterminado y un segundo valor predeterminado que es más pequeño que el primer valor predeterminado como puntos de cambio del valor de la ganancia con respecto a la aceleración calculada usando la segunda velocidad de rotación de referencia (MAX) . de modo que el valor de la ganancia se hace más grande en correspondencia con los tres rangos siguientes, en un orden indicado: (i) un rango en el que la aceleración, calculada utilizando la segunda velocidad de rotación de referencia, es igualo mayor que el primer valor predeterminado; (ii) un rango en el que la aceleración, calculada utilizando la segunda velocidad de rotación de referencia, es igualo mayor que el segundo valor predeterminado pero es menor que el primer valor 5 predeterminado; (iii) un rango en el que la aceleración, calculada utilizando la segunda velocidad de rotación de referencia, es menor que el segundo valor predeterminado. 6. Dispositivo de control para vehículo eléctrico ferroviario según cualquiera de las reivindicaciones anteriores, en el que la unidad generadora de valores de orden de par induye una unidad de retardo de primer orden (2B) que emite 10 el valor de orden de par que ha sido generado en base al segundo valor de índice de nivel de adherencia (ADL) , después de aplicar un retardo de primer orden al mismo, y la segunda unidad generadora de indices de nivel de adherencia (B) induye una unidad de retardo de desactivación (24) que configura una constante de tiempo utilizada por la unidad de retardo de primer orden (23) según un valor de la ganancia (54) .
FIG.1
TO*
1 2
FIG.2
FM4
ro·
.1
, , , , , , , , , I
- "
w
- , r'~-------_.,
....... ;:';';'';;';;;';';Jl: : :
1: FMmax ::l' , : : ! :23 : ¡
I ••••••••••••__ .. , ' '22, I
I
1 .~ :
: '-. 34':
: 32' : I , t-•. 8
I , I I I I I I
l_~:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::______________________________ _
FIG.3
FM2TO FM4
:, , , I
, I
, , I I
~ I
I
\.. ..
OFT o r
~
, DFM I
al ...... -¡ I I ............ 1
I
•
I II ·I , I
·
I
I
I
I ·, I
I ·
I , I I ·, I I
I : , I
ADL1
:1 f'--· ! I ~
I
I I
, ·I · TIEMPO tO 11 I ti I t3 t4 ·
FIG.4
ADL1
:t b ¡ •
I
:1 . · · ·
·I ·
·I · ·
ADL2 ¡ · ··• ·
•
··•
·:
ADL3
:1 · ·1 · •
· I
·
I
ADL4 ¡
I
:1 · · · · ¡ I I •
I
¡
·• ·I I
·I • · ·
ADLO · ·
:1 ~ ~ •
·· :
·
· ·
J · ! · I ·
· ·
TO" ¡ ·
J ~ · ¡ I ! · : I I · ·· •
•
·• I ·
T* · ·
: I ·
;
· :
tO t1 t2 · t3 · t4 TIEMPO
VELOCIDAD REAL
_.. _-----_... ------
FM1 TO
FM4 l-__--i-~---~----~-------------. -----------------------
FMmin A1 0r------¡--t--r--------------------~
·
·
·
·
·
·
·
A3 O
:
I
·I ·I
·
I I ·· I I · I I I · · · I I·
DFTO
l'.
• I• I
·
·
·
·
DFMol •
I
I
·
ADLO:t · :
t!
tO t1: I t3 t4
TIEMPO
I
·
·
t2
FIG.6
· .
FM1TO
..~... -!-~.. _..
FM4
··, .
· · · . .
·· ..
- -----...·---l--------t---... -.
FMmax
·· ., · , :, : I
i
· .
ADLO
~ . .
:1L-------+-'---------------+!---ti--ii----------------~~
• I
· :
S1
t ---, ------, ':, · . ~
o: L-I . ¡ , ::k.L .... ---. .......
o-.m.H-~----. .. .m__ ______ n __ ¡~¡
T____ • ~
S2
t ~T
, t ., •
ADL :t~--~:~-l ~'-+l-----~
TO* 1 ., : oL-----~----+_----~~~~-------. T* 1~------~~____~ oL-------~----~~------t-~t--t-------T;.I:EM::PO tO t1 t2 t3 t5 16 t4
Patentes similares o relacionadas:
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente, del 26 de Febrero de 2014, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a unelemento móvil , en donde la estructura de regulador presenta […]
 Máquinas eléctricas de inducción de CA asíncronas en conexión en serie con enclavamiento cruzado, del 23 de Mayo de 2012, de YANG, TAI-HER: Al menos dos máquinas eléctricas de inducción de CA asíncronas en conexión en serie conenclavamiento cruzado, a las que se hace referencia […]
Máquinas eléctricas de inducción de CA asíncronas en conexión en serie con enclavamiento cruzado, del 23 de Mayo de 2012, de YANG, TAI-HER: Al menos dos máquinas eléctricas de inducción de CA asíncronas en conexión en serie conenclavamiento cruzado, a las que se hace referencia […]
 Máquinas eléctricas asíncronas de inducción de CA en conexión paralela con enclavamiento cruzado, del 14 de Marzo de 2012, de YANG, TAI-HER: Las máquinas eléctricas asíncronas de jaula de ardilla en conexión paralela con enclavamiento cruzado, quedescribe que por lo menos dos máquinas […]
Máquinas eléctricas asíncronas de inducción de CA en conexión paralela con enclavamiento cruzado, del 14 de Marzo de 2012, de YANG, TAI-HER: Las máquinas eléctricas asíncronas de jaula de ardilla en conexión paralela con enclavamiento cruzado, quedescribe que por lo menos dos máquinas […]
REGULACION DE TRACCION PARA EL CABLE DE CUCHARA DE UNOS APARATOS DE TRANSBORDO DE MATERIAL A GRANEL., del 16 de Junio de 1995, de SIEMENS AKTIENGESELLSCHAFT: LA INVENCION: TRATA DE LA REGULACION DE TRACCION PARA CABLES (6', 6'') DE LA CUCHARA DE UNOS APARATOS DE TRANSBORDO DE MATERIAL A GRANEL, QUE TIENE UNA CUCHARA […]
Dispositivo para un vehículo ferroviario accionado de forma eléctrica, del 8 de Mayo de 2019, de Siemens Mobility GmbH: Dispositivo para un vehículo ferroviario accionado eléctricamente, con una disposición de conmutación que puede conectarse a una unidad de tracción […]
Vehículo ferroviario con al menos dos tomacorrientes, del 11 de Enero de 2017, de SIEMENS AKTIENGESELLSCHAFT: Vehículo ferroviario con un primer tomacorriente que a través de un primer conmutador principal puede alimentar una primera unidad transformadora […]
Disposición de conductor para producir un campo electromagnético y vía de transporte para vehículos, en particular para automóviles viarios, que comprende la disposición de conductor, del 21 de Mayo de 2014, de BOMBARDIER TRANSPORTATION GMBH: Una disposición de conductor prefabricada destinada a incorporarse en material de una vía de transporte y a producir un campo electromagnético y transferir […]
Uso de un núcleo magnético en un dispositivo convertidor de corriente para un vehículo eléctrico, del 14 de Mayo de 2014, de MITSUBISHI ELECTRIC CORPORATION: Uso de un nudeo magnetico de un aparato de conversion de corriente para un vehiculo electrico que connprende: una unidad convertidora que esta […]