Captador autónomo de posición y sistema de determinación de posición de una herramienta de una máquina de trabajos de obras, por medio de captadores de posición.
Dispositivo detector de la posición angular (3, 30, 31, 32) para equipar un órgano articulado (20,
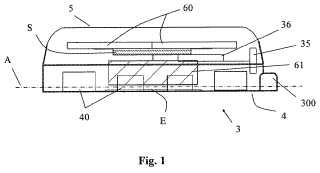
21, 22) de unamáquina de trabajos de obras (2), que comporta, como mínimo, una cara de acoplamiento (4) dotada de elementosde fijación (40, 41) que permiten mantener la cara de acoplamiento (4) acoplada contra una superficie 5 plana enmovimiento del órgano, un módulo (35) de comunicación por ondas electromagnéticas para enviar informacioneshacia un receptor de un aparato de control (10) situado a distancia, caracterizado porque el dispositivo recibe, pordebajo de, como mínimo, una carcasa (5) o envolvente solidaria de la cara de acoplamiento (4):
- una fuente de alimentación eléctrica autónoma (61),
- una unidad de tratamiento (36),
- un módulo electrónico detector de posición,
y porque el módulo electrónico detector de posición comprende, como mínimo, un captador (S) de posición angularpara facilitar datos de posición angular a la unidad de tratamiento (36), comportando el módulo de comunicación (35)un emisor con interfaz inalámbrico conectado a la unidad de tratamiento (36) para enviar a una cierta distancia haciael aparato de control (10) los datos de posición angular dentro de una señal de emisión (Sg);
y porque los elementos de fijación (40, 41) de la cara de acoplamiento (4) son elementos de fijación desmontablesque comprenden, como mínimo, un imán (40) y que están desprovistos de tornillos para su fijación manual, sinayuda de herramientas.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08290381.
Solicitante: AGATEC.
Nacionalidad solicitante: Francia.
Dirección: 21, BOULEVARD LITTRE 78600 LE MESNIL LE ROI FRANCIA.
Inventor/es: Gamal,Albert, Chiorean,Dumitru Mircea, Bonetti,Gianmarco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- E02F3/28 CONSTRUCCIONES FIJAS. › E02 HIDRAULICA; CIMENTACIONES; MOVIMIENTO DE TIERRAS. › E02F DRAGADO; MOVIMIENTO DE TIERRAS (extracción de turba E21C 49/00). › E02F 3/00 Dragas; Ingenios para el movimiento de tierras (para usos particulares E02F 5/00; otras máquinas o aparatos para la explotación minera E21C; construcción de túneles E21D). › con herramientas excavadoras montadas sobre el brazo del cucharón o la cuchara, p. ej. cucharas, palas.
- E02F3/42 E02F 3/00 […] › Accionamiento para cucharas, palas, brazos de cucharas o brazos de palas.
- E02F3/43 E02F 3/00 […] › Control de la posición de la cuchara o de la pala; Control de la sucesión de operaciones de accionamiento.
- G01D5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00).
- G08C17/00 G […] › G08 SEÑALIZACION. › G08C SISTEMAS DE TRANSMISION DE VALORES MEDIDOS, SEÑALES DE CONTROL O SIMILARES (sistemas de transmisión con presión de fluido F15B; medios mecánicos para convertir la salida de un órgano sensible en otra variable G01D 5/00; sistemas de control mecánico G05G). › Disposiciones para transmitir señales caracterizadas por la utilización de una vía eléctrica sin hilo.
PDF original: ES-2386944_T3.pdf
Fragmento de la descripción:
Captador autónomo de posición y sistema de determinación de posición de una herramienta de una máquina de trabajos de obras, por medio de captadores de posición
SECTOR TÉCNICO DE LA INVENCIÓN
La presente invención se refiere a dispositivos indicadores de posición en el sector del control de herramientas de excavación o herramientas similares articuladas en el brazo de una máquina de trabajos de obras. La invención se refiere más particularmente al dispositivo detector de posición angular para equipar un órgano articulado de una máquina de trabajos de obras, así como un sistema de determinación de la posición de una herramienta montada sobre un brazo articulado de una máquina de trabajos de obras. La invención se refiere igualmente a una máquina de excavación que permite controlar la geometría y la posición del conjunto de la cuchara-brazo de la cuchara.
ANTERIORIDADES TECNOLÓGICAS DE LA INVENCIÓN
Son conocidos por la técnica anterior, por ejemplo, por los documentos US 4 491 927, US 5 848 485, US 6 336 077, US 6 609 315 o FR 2 620 148, numerosos sistemas de control de la posición de una herramienta situada en el extremo de un brazo articulado, utilizando captadores inclinómetros que comunican con una unidad de tratamiento electrónico centralizada (instalada de forma general en la cabina de conducción.
Es igualmente conocido por el documento US 2006/243180, un sistema para clasificar una operación realizada por una máquina de trabajos de obras. El sistema puede comprender captadores cableados o no, dispuestos en la máquina. Cada captador está configurado para detectar uno o varios parámetros asociados con la máquina. Además, el sistema puede comprender un dispositivo de memoria que registra datos de clasificación asociados con diferentes tipos de operaciones que se pueden realizar por la máquina. El sistema puede comprender también un procesador configurado para recibir una señal indicativa, como mínimo de un parámetro detectado, y clasificar un funcionamiento de la máquina, por lo menos en uno de los tipos distintos de operaciones que se pueden realizar por la máquina, en función de la señal recibida y de los datos de clasificación registrados.
El documento US 2006/085118 propone igualmente una máquina excavadora que comprende un brazo, una cuchara, un cable de levantamiento a partir del cual la cuchara está suspendida del brazo, y un cable de tracción para la tracción de la cuchara. Los medios técnicos son utilizados para facilitar datos sobre la alineación, según un plano vertical que contiene el eje del brazo, de cómo mínimo uno de los componentes de la máquina. Estos datos pueden ser introducidos por un interfaz hombre-máquina, por el cual la etapa de control es efectuada por el operador y/o pueden ser introducidos por medios para controlar el mando del cable de levantamiento y/o del cable de tracción, de manera que se disminuya o que se interrumpan dicho mando como respuesta a una alineación defectuosa detectada de dichos componentes de la máquina.
El documento DE 4335479 da a conocer un procedimiento para la detección de la inclinación basada en la utilización de una célula de medición montada sobre una herramienta de excavación. La inclinación es medida de forma continua en las direcciones X e Y por la célula de medición. La información es registrada y transferida de forma inalámbrica a una estación de base que relaciona el dato con la profundidad medida de la herramienta. La combinación de datos está representada en un dispositivo central de control de datos y es sometida a un ordenador de evaluación. El dato registrado en la célula de medición es transferido a la estación de base cuando la célula pasa por un punto nulo absoluto.
El control de la profundidad real de trabajo por la herramienta es una ayuda muy apreciable en el campo de la excavación. Se pueden obtener precisión y rapidez de trabajo incluso en condiciones difíciles de visibilidad. No obstante, un inconveniente de estos sistemas es el arrancamiento de los cables que conectan los captadores a la unidad de tratamiento. Después de la rotura de un cable, el sistema no es operativo puesto que no se pueden recoger señales de posición del captador o captadores. Por lo tanto, es necesario, con dichos sistemas, prever cables de recambio, y los operadores deben perder tiempo en la sustitución de los cables.
También se pueden utilizar fundas de protección resistentes para recubrir los cables o conexiones eléctricas, para limitar los casos de arrancamiento. No obstante, la utilización de fundas de protección resistentes (de acero inoxidable) no impide el arrancamiento de los cables en condiciones de trabajo difíciles.
Otro inconveniente de los sistemas resistentes es que es necesario pasar, como mínimo, media jornada para instalar el conjunto de los captadores. En efecto, es necesario fijar, por ejemplo, mediante tornillos, el captador o captadores en una posición precisa del brazo (por ejemplo, a nivel de una placa soldada sobre el brazo) . Las fundas de protección, los cables de alimentación eléctrica de los captadores y los cables de comunicación de las señales de posición generadas por los captadores deben ser fijadas igualmente de forma conveniente. La instalación de estos cables (con o sin funda) obliga igualmente a una pérdida de tiempo. Existe, por lo tanto, una necesidad de sistemas más rápidos de instalación y robustos para resistir a condiciones severas de utilización.
El documento US 2004/0139803 da a conocer un captador de vibraciones multi-ejes, que puede ser fijado magnéticamente sobre un dispositivo vibrante del que se quieren mejorar las vibraciones. Este captador presenta siempre el inconveniente de tener la necesidad de un conector de cable para transmitir sus señales. Además, no puede ser dispuesto en cualquier superficie del dispositivo vibrante, puesto que es necesario un patín para colocarlo.
DESCRIPCIÓN GENERAL DE LA INVENCIÓN
La presente invención tiene, por lo tanto, como objetivo, paliar uno o varios de los inconvenientes de la técnica anterior, definiendo un dispositivo detector de posición angular, práctico, para instalar en un órgano articulado de una máquina de trabajos de obras que es preciso, fiable y resistente a condiciones extremas de utilización.
Este objetivo se consigue mediante un dispositivo detector de posición angular para equipar un órgano articulado de una máquina de trabajos de obras, que comporta, como mínimo, una cara de acoplamiento dotada de elementos de fijación que permiten mantener la cara de acoplamiento aplicada contra una superficie plana en movimiento del órgano, un módulo de comunicación por ondas electromagnéticas para enviar informaciones hacia un receptor de un aparato de control alejado, caracterizado porque el dispositivo se aloja debajo de, como mínimo, una envolvente o caja solidaria de la cara de acoplamiento:
- una fuente de alimentación eléctrica autónoma,
- una unidad de tratamiento,
- un módulo electrónico detector de posición,
y porque el módulo electrónico detector de posición comprende, como mínimo, un captador de posición angular para facilitar los datos de posición angular a la unidad de tratamiento, comportando el módulo de comunicación un emisor con interfaz inalámbrico conectado a la unidad de tratamiento para enviar a distancia, hacia el aparato de control, los datos de posición angular en una señal de emisión.
De este modo, se posibilita con este tipo de dispositivo detector, eliminar los cables y equipar con rapidez una máquina de trabajos de obras con un sistema de control de movimiento de la máquina. El dispositivo puede simplemente ser colocado y acoplado sobre su soporte. El usuario puede, por ejemplo, sostener en una sola mano el dispositivo autónomo en la colocación. Además, la alimentación eléctrica autónoma, es decir, recargable in situ, permite evitar manipulaciones y pérdidas de tiempo cuando se dispone solamente de acumuladores pasivos.
Según la invención, los elementos de fijación de la cara de acoplamiento son elementos de fijación desmontables y desprovistos de tornillos para ser fijados manualmente sin ayuda de herramientas.
La cara de acoplamiento es aplanada y los elementos de fijación comprenden, como mínimo, un imán.
De este modo, gracias a la cara de acoplamiento, se asegura que el dispositivo... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo detector de la posición angular (3, 30, 31, 32) para equipar un órgano articulado (20, 21, 22) de una máquina de trabajos de obras (2) , que comporta, como mínimo, una cara de acoplamiento (4) dotada de elementos de fijación (40, 41) que permiten mantener la cara de acoplamiento (4) acoplada contra una superficie plana en movimiento del órgano, un módulo (35) de comunicación por ondas electromagnéticas para enviar informaciones hacia un receptor de un aparato de control (10) situado a distancia, caracterizado porque el dispositivo recibe, por debajo de, como mínimo, una carcasa (5) o envolvente solidaria de la cara de acoplamiento (4) :
- una fuente de alimentación eléctrica autónoma (61) ,
- una unidad de tratamiento (36) ,
- un módulo electrónico detector de posición,
y porque el módulo electrónico detector de posición comprende, como mínimo, un captador (S) de posición angular para facilitar datos de posición angular a la unidad de tratamiento (36) , comportando el módulo de comunicación (35) un emisor con interfaz inalámbrico conectado a la unidad de tratamiento (36) para enviar a una cierta distancia hacia el aparato de control (10) los datos de posición angular dentro de una señal de emisión (Sg) ; y porque los elementos de fijación (40, 41) de la cara de acoplamiento (4) son elementos de fijación desmontables que comprenden, como mínimo, un imán (40) y que están desprovistos de tornillos para su fijación manual, sin ayuda de herramientas.
2. Dispositivo, según la reivindicación 1, en el que la cara de acoplamiento (4) es plana.
3. Dispositivo, según una de las reivindicaciones 1 ó 2, en el que el emisor con interfaz inalámbrico del módulo (35) de comunicación transmite dentro de la señal de emisión (Sg) un identificador propio del dispositivo (3, 30, 31, 32) .
4. Dispositivo, según una de las reivindicaciones 1 a 3, en el que la fuente de alimentación eléctrica autónoma (61) comprende, como mínimo, una batería cargada por células fotovoltaicas.
5. Dispositivo, según la reivindicación 4, en el que las células fotovoltaicas están montadas, como mínimo, en un panel (60) en oposición a la cara de acoplamiento (4) .
6. Dispositivo, según una de las reivindicaciones 1 a 5, en el que el conjunto de los componentes está dispuesto en el dorso de la cara de acoplamiento (4) , estando recubiertos, los componentes y paneles solares (60) asociados, por una carcasa (5) de protección transparente.
7. Dispositivo, según una de las reivindicaciones 1 a 6, en el que cada captador de posición angular (S) es de tipo de captador acelerómetro.
8. Dispositivo, según una de las reivindicaciones 1 a 7, en el que los elementos de fijación (40, 41) de la cara de acoplamiento (4) comprende cavidades o alojamientos (41) de posicionamiento, según una dirección preferente.
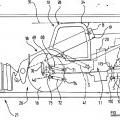
9. Utilización de dispositivos detectores de posición angular (30, 31, 32) , según la reivindicación 1, en un sistema de determinación de la posición de una herramienta (22) montada sobre un brazo articulado (20, 21) de una máquina de trabajos de obras (2) , que comprende un aparato de control (10) , estando repartidos cada uno de los dispositivos detectores (30, 31, 32) en diferentes partes articuladas de la máquina de trabajos de obra, comprendiendo el aparato de control (10) :
- receptor (12) de comunicación inalámbrica para recibir la señal de emisión (Sg) ,
- un interfaz de usuario (100) dotado de una pantalla indicadora, y
- un módulo de cálculo de una posición de la herramienta (22) por utilización de los datos de posición angular procedentes del conjunto de los dispositivos detectores (30, 31, 32) .
10. Utilización de dispositivos detectores, según la reivindicación 9, en la que el emisor con interfaz inalámbrico del módulo de comunicación de cada uno de los dispositivos detectores (30, 31, 32) transmite, dentro de la señal de emisión (Sg) , un identificador.
11. Utilización de dispositivos detectores, según la reivindicación 9 ó 10, en la que la fuente de alimentación eléctrica autónoma de cada uno de los dispositivos detectores (30, 31, 32) comprende, como mínimo, una batería cargada por células fotovoltaicas.
12. Utilización de dispositivos detectores, según una de las reivindicaciones 9 a 11, en la que la cara de acoplamiento (4) de cada uno de los dispositivos detectores (30, 31, 32) es aplanada.
13. Utilización de dispositivos detectores, según una de las reivindicaciones 9 a 12, en la que el módulo de cálculo compara, además, la posición de la herramienta (22) calculada con una profundidad de referencia ajustada con
intermedio del interfaz de usuario para determinar una consigna de ajuste vertical de la herramienta (22) , suministrando el módulo de cálculo, una señal representativa de dicha consigna de destino de la pantalla indicadora.
14. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina excavadora
(2) que comprende un bastidor (200) , un brazo de soporte (20) fijado de manera pivotante sobre el bastidor (200) , un brazo de cuchara (21) que tiene un primer extremo y un segundo extremo, estando acoplado al primer extremo de manera pivotante sobre el brazo de soporte (20) , estando acoplado la herramienta de tipo cuchara (22) de manera pivotante sobre el segundo extremo del brazo de cuchara (21) y un sistema accionador para accionar, como respuesta a señales de mando, el brazo de soporte (20) , el brazo de cuchara (21) y la herramienta (22) , caracterizado porque la máquina comprende:
- tres dispositivos detectores de posición angular (30, 31, 32) , según la reivindicación 1, estando dispuestos dichos dispositivos detectores (30, 31, 32) por medio de imanes (40) , respectivamente, sobre el brazo de soporte (20) , el brazo de la cuchara (21) y la herramienta (22) ;
- un interfaz de usuario (100) para permitir controlar el sistema accionador; y
- en conexión con el interfaz de usuario (100) , un aparato de control (10) dotado de un receptor de comunicación inalámbrico para recibir señales de emisión (Sg) suministradas por los emisores de tres dispositivos detectores.
15. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina, según la reivindicación 14, en la que el emisor por interfaz inalámbrico del módulo de comunicación de cada uno de los dispositivos detectores (30, 31, 32) transmite dentro de la señal de emisión (Sg) un identificador, comprendiendo el aparato de control (10) una tabla de de correspondencia para asociar a un órgano articulado entre el brazo de soporte (20) , el brazo de la cuchara (21) y la herramienta (22) una posición angular transmitida en la señal de emisión (Sg) , estando establecida esta asociación gracias al identificador de dispositivo detector transmitido con la posición angular en la señal de emisión (Sg) .
16. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina, según la reivindicación 14 ó 15, en la que los emisores y el receptor utilizan ondas de radio con una frecuencia determinada.
17. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina, según una de las reivindicaciones 14 a 16, en la que el aparato de control (10) comprende:
- una memoria para almacenar un parámetro de profundidad de referencia;
- un módulo de cálculo de una consigna de movimiento vertical de la herramienta (22) por utilización de datos de posición angular facilitados por los tres dispositivos detectores (30, 31, 32) y del parámetro de profundidad de referencia;
- un enlace con una pantalla indicadora del interfaz de usuario para facilitar a esta pantalla indicadora el resultado del cálculo de consigna.
18. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina, según una de las reivindicaciones 14 a 17, en la que el brazo de soporte (20) o el dispositivo detector (30) situado sobre el brazo de soporte (20) , está dotado de un dispositivo receptor láser lineal (70) que permite detectar un paso del receptor láser lineal a una altura definida por un plano láser de referencia, incluyendo el dispositivo receptor láser lineal (70) un módulo de comunicación inalámbrico para enviar, dentro de una señal de emisión (Sg’) , los datos de detección del haz láser en el aparato de control (10) .
19. Utilización de un sistema de determinación de la posición de una herramienta (22) de una máquina, según la reivindicación 18, en la que el dispositivo receptor láser lineal (70) comprende, como mínimo, una célula de recepción lineal que comprende fotodiodos alineados.
Patentes similares o relacionadas:
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
BRAZO PARA PALA CARGADORA CON VÁLVULA DE CONTROL INCORPORADA., del 11 de Mayo de 2017, de TENIAS, S.A.: 1. Brazo para pala cargadora con válvula de control incorporada, específicamente un brazo articulado del tipo de los incorporados en palas cargadoras […]
Implemento mecánico para cuchara bivalva y su uso en la ejecución de pozos verticales de gran diámetro, del 14 de Diciembre de 2016, de UNIVERSIDAD DE ALMERIA: Implemento mecánico para cuchara bivalva en la ejecución de pozos verticales de gran diámetro. La presente invención tiene como objeto la mejora de […]
SISTEMA DE MONITOREO PARA LA DETECCION DE ELEMENTOS FERROMAGNETICOS EN LA CARGA DE MINERAL., del 21 de Enero de 2016, de CADATECH S.A: Un sistema de monitoreo para la detección de elementos ferromagnéticos ocultos en la carga de mineral, durante la carga y/o descarga de un contenedor, el cual comprende: […]
Controlador para su uso con una máquina, máquina que incluye dicho controlador, y método para controlar una máquina, del 14 de Enero de 2015, de J.C. BAMFORD EXCAVATORS LIMITED: Un controlador para su uso con una máquina que comprende un cuerpo de máquina y un aparato de manipulación de carga acoplado al cuerpo de la […]
 Aparato de manipulación de carga, del 24 de Septiembre de 2014, de J.C. BAMFORD EXCAVATORS LIMITED: Un aparato de trabajo que incluye un cuerpo , un medio motriz operado por potencia , un eje delantero y un eje trasero , llevando cada uno […]
Aparato de manipulación de carga, del 24 de Septiembre de 2014, de J.C. BAMFORD EXCAVATORS LIMITED: Un aparato de trabajo que incluye un cuerpo , un medio motriz operado por potencia , un eje delantero y un eje trasero , llevando cada uno […]
 Una conexión rápida de seguridad para acoplar una herramienta a una máquina de trabajo, del 6 de Agosto de 2014, de C.M.C. S.r.l. - Società Unipersonale: Una conexión rápida de seguridad adecuada para unir una herramienta a una máquina de trabajo, estando esta equipada con un brazo elevador articulado abisagrado […]
Una conexión rápida de seguridad para acoplar una herramienta a una máquina de trabajo, del 6 de Agosto de 2014, de C.M.C. S.r.l. - Società Unipersonale: Una conexión rápida de seguridad adecuada para unir una herramienta a una máquina de trabajo, estando esta equipada con un brazo elevador articulado abisagrado […]
CARGADORA DE RUEDAS EQUIPADA CON UNA PALA DE CARGA Y EL USO DE UNA PALA DE CARGA PARA UNA CARGADORA DE RUEDAS, del 2 de Noviembre de 2011, de LANG, THOMAS: Cargadora de ruedas que comprende una pala dotada de un instrumento de trabajo (2, 2', 2'', 2'''), en la que la pala presenta un motor de giro […]