Aumento del sistema de localización inalámbrica comercial (WLS) con sensores móviles y/o aerotransportados para mejor exactitud de la localización y uso de imágenes aéreas en tiempo real para identificación de posiciones de dispositivos inalámbricos.
Un sistema movil para uso en un sistema de localizacion inalambrica,
WLS (200), incluyendo:
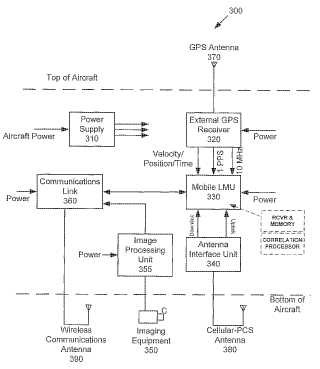
una unidad de medicion de posicion movil, LMU (225, 330) soportada por una plataforma movil, incluyendo dichaLMU movil un receptor (340, 380) configurado para recibir transmisiones de radio frecuencia, RF, de una estacionmovil, MS, y memoria para almacenar muestras de datos de transmisiones recibidas;
un modulo GPS (320, 370) soportado por dicha plataforma movil y acoplado operativamente a dicha LMU movil (225,330), donde dicho modulo GPS (320, 370) determina la posicion tridimensional y la velocidad de la LMU movil (225,330), asi como una referencia de frecuencia y hora exacta; y
un receptor de enlace descendente (340, 380) configurado para recibir una senal de enlace descendente de almenos una estacion transceptora base, BTS, o controlador de red, incluyendo dicha senal de enlace descendentedatos que permiten que dicha LMU derive una replica de una transmision de la estacion movil, MS, recibida en unlugar de recogida de senal alejado de dicho sistema movil, y un procesador configurado para correlacionar datosalmacenados que representan una transmision recibida con una replica de dicha transmision recibida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/012873.
Solicitante: TRUEPOSITION, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1000 CHESTERBROOK BOULEVARD , SUITE 200 BERWYN, PA 19312 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ANDERSON, ROBERT, J., BULL, JEFFREY F., GINTER,THOMAS,STEPHAN, WARD,MATTHEW,L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica.
- G01S5/02 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/06 G01S 5/00 […] › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/12 tiene prioridad).
PDF original: ES-2389501_T3.pdf
Fragmento de la descripción:
Aumento del sistema de localización inalámbrica comercial (WLS) con sensores móviles y/o aerotransportados para mejor exactitud de la localización y uso de imágenes aéreas en tiempo real para identificación de posiciones de dispositivos inalámbricos
Campo Técnico
La presente invención se refiere en general a métodos y aparatos para localizar transmisores inalámbricos, tales como los usados en sistemas celulares analógicos o digitales, sistemas de comunicaciones personales (PCS) , radios móviles especiales mejoradas (ESMRs) , y otros tipos de sistemas de comunicaciones inalámbricas, y más en concreto, aunque no exclusivamente, la presente invención se refiere al uso de una estación receptora móvil (por ejemplo, una unidad de medición de posición (LMU) ) en un sistema de localización inalámbrica (WLS) .
Antecedentes
Los primeros trabajos relativos a sistemas de localización inalámbrica se describen en la Patente de Estados Unidos número 5.327.144, de 5 de julio de 1994, “Sistema de localización de teléfonos celulares”, que describe un sistema para localizar teléfonos celulares usando nuevas técnicas de diferencia de tiempo de llegada (TDOA) . Además, se describen mejoras del sistema descrito en la patente '144 en la Patente de Estados Unidos número 5.608.410, de 4 de marzo de 1997, “Sistema para localizar una fuente de transmisiones en ráfagas”.
En los pocos últimos años, la industria celular ha incrementado el número de protocolos de interface de aire disponibles para uso por teléfonos inalámbricos, ha incrementado el número de bandas de frecuencia en las que los teléfonos inalámbricos o móviles pueden operar, y ha ampliado el número de términos que se refieren o dicen relación a teléfonos móviles de manera que incluyan “servicios de comunicaciones personales”, “inalámbricos” y otros. Los protocolos de interface de aire incluyen ahora AMPS, N-AMPS, TDMA, CDMA, GSM, TACS, ESMR, GPRS, EDGE, UMTS WCDMA, y otros. Los cambios en la terminología y los incrementos del número de interfaces de aire no cambian los principios básicos ni las invenciones descubiertas y mejoradas por los inventores. Sin embargo, de acuerdo con la terminología corriente de la industria, los inventores llaman ahora al sistema aquí descrito un sistema de localización inalámbrica.
El valor y la importancia del sistema de localización inalámbrica han sido reconocidos por la industria de comunicaciones inalámbricas. En junio de 1996, la Comisión Federal para las Comunicaciones hizo públicos los requisitos para que la industria de comunicaciones inalámbricas desplegase sistemas de localización para uso en la localización de llamantes inalámbricos al 9-1-1, con el plazo de octubre de 2001. La localización de llamantes inalámbricos E9-1-1 reducirá el tiempo de respuesta, salvará vidas, y ahorrará enormes costos a causa del uso reducido de recursos de respuesta a emergencias. Además, estudios y análisis realizados han llegado a la conclusión de que varias aplicaciones inalámbricas, tales como facturación sensible a posición, gestión de flotas, y otros, tendrán gran valor comercial en los años venideros.
TruePosition ha continuado desarrollando sistemas y técnicas para mejorar más la exactitud de los sistemas de localización inalámbricos reduciendo al mismo tiempo de forma significativa el costo de estos sistemas. Por ejemplo, se han concedido las siguientes patentes del mismo cesionario por varias mejoras en el campo de la localización inalámbrica:
Patente de Estados Unidos número 5.327.144, de 5 de julio de 1994: Sistema de localización de teléfonos celulares;
Patente de Estados Unidos número 5.608.410, de 4 de marzo de 1997: Sistema para localizar una fuente de transmisiones en ráfagas;
Patente de Estados Unidos número 6.047.192, de 4 de abril de 2000: Sistema de localización robusto y eficiente;
Y la Patente de Estados Unidos número 6.782.264 B2, de 24 de agosto de 2004: Supervisión de información de llamada en un sistema de localización inalámbrica.
Como se ha mencionado, hay numerosos protocolos de interface de aire usados para sistemas de comunicaciones inalámbricas. Estos protocolos se usan en diferentes bandas de frecuencia, tanto en los Estados Unidos como internacionalmente. La banda de frecuencia no impacta generalmente en la efectividad del sistema de localización inalámbrica al localizar teléfonos inalámbricos.
Los protocolos de interface de aire usan dos tipos de “canales”. El primer tipo incluye canales de control que se usan para transportar información acerca del teléfono inalámbrico o transmisor, para iniciar o terminar llamadas, o para transferir datos en ráfagas. Por ejemplo, algunos tipos de servicios de mensajes cortos transfieren datos por el canal de control. En diferentes interfaces de aire, los canales de control son conocidos por una terminología diferente, pero el uso de los canales de control en cada interface de aire es similar. Los canales de control tienen generalmente
información de identificación acerca del teléfono inalámbrico o transmisor contenido en la transmisión. El segundo tipo de canal incluye canales de voz, también conocidos como canales de tráfico, que se usan típicamente para transportar voz o comunicaciones de datos por la interface de aire. Estos canales se usan después de que una llamada ha sido establecida usando los canales de control. Los canales de voz y datos de usuario usarán normalmente recursos dedicados dentro del sistema de comunicaciones inalámbricas mientras que los canales de control usarán recursos compartidos. Esta distinción puede utilizar los canales de control a efectos de localización inalámbrica de costo más razonable que el uso de canales de voz, aunque hay algunas aplicaciones en las que se desea la localización regular en el canal de voz. Los canales de voz no tienen generalmente información de identificación acerca del teléfono inalámbrico o transmisor en la transmisión.
A continuación se explican algunas diferencias de los protocolos de interface de aire:
AMPS – Éste es el protocolo de interface de aire original usado para comunicaciones celulares en los Estados Unidos. En el sistema AMPS, se asignan canales dedicados separados para uso por los canales de control (RCC) . Según la norma TIA/EIA IS-553A, cada bloque de canales de control debe comenzar en el canal celular 313 o 334, pero el bloque puede ser de longitud variable. En los Estados Unidos., por convención, el bloque de canales de control AMPS es de 21 canales de ancho, pero también se conoce el uso de un bloque de 26 canales. Un canal de voz inverso (RVC) puede ocupar cualquier canal no asignado a un canal de control. La modulación de los canales de control es FSK (manipulación por desplazamiento de frecuencia) , mientras que los canales de voz son modulados usando FM (modulación de frecuencia) .
N-AMPS – Esta interface de aire es una expansión del protocolo de interface de aire AMPS, y se define en la norma EIA/TIA IS-88. Los canales de control son sustancialmente los mismos que para AMPS, pero los canales de voz son diferentes. Los canales de voz ocupan menos de 10 KHz de anchura de banda, frente a los 30 KHz usados para AMPS, y la modulación es FM.
TDMA – Esta interface también se denomina D-AMPS, y se define en el estándar EIA/TIA IS-136. Esta interface de aire se caracteriza por el uso de separación de frecuencia y tiempo. Los canales de control son conocidos como canales de control digitales (DCCH) y son transmitidos en ráfagas a intervalos de tiempo asignados para uso por DCCH. A diferencia de AMPS, DCCH puede ser asignado en cualquier lugar en la banda de frecuencia, aunque hay generalmente algunas asignaciones de frecuencia que son más atractivas que otras en base al uso de bloques de probabilidad. Los canales de voz son conocidos como canales digitales de tráfico (DTC) . DCCH y DTC pueden ocupar las mismas asignaciones de frecuencia, pero no la misma asignación de tiempo en una asignación de frecuencia dada. DCCH y DTC usan el mismo esquema de modulación, conocido como π/4 DQPSK (manipulación por desplazamiento de fase en cuadratura diferencial) . En la banda celular, un soporte puede usar ambos protocolos AMPS y TDMA, a condición de que las asignaciones de frecuencia para cada protocolo se mantengan separadas.
CDMA -Esta interface de aire se define por... [Seguir leyendo]
Reivindicaciones:
1. Un sistema móvil para uso en un sistema de localización inalámbrica, WLS (200) , incluyendo:
una unidad de medición de posición móvil, LMU (225, 330) soportada por una plataforma móvil, incluyendo dicha LMU móvil un receptor (340, 380) configurado para recibir transmisiones de radio frecuencia, RF, de una estación móvil, MS, y memoria para almacenar muestras de datos de transmisiones recibidas;
un módulo GPS (320, 370) soportado por dicha plataforma móvil y acoplado operativamente a dicha LMU móvil (225, 330) , donde dicho módulo GPS (320, 370) determina la posición tridimensional y la velocidad de la LMU móvil (225, 330) , así como una referencia de frecuencia y hora exacta; y
un receptor de enlace descendente (340, 380) configurado para recibir una señal de enlace descendente de al menos una estación transceptora base, BTS, o controlador de red, incluyendo dicha señal de enlace descendente datos que permiten que dicha LMU derive una réplica de una transmisión de la estación móvil, MS, recibida en un lugar de recogida de señal alejado de dicho sistema móvil, y un procesador configurado para correlacionar datos almacenados que representan una transmisión recibida con una réplica de dicha transmisión recibida.
2. Un sistema móvil según la reivindicación 1, donde la plataforma móvil incluye un avión.
3. Un sistema móvil según la reivindicación 1, donde la LMU móvil (225, 330) está configurada para recibir transmisiones de radio frecuencia, RF, de dispositivos inalámbricos.
4. Un sistema móvil según la reivindicación 3, donde dicha plataforma móvil incluye antenas (370, 380) configuradas para recibir transmisiones de enlace descendente de una estación transceptora base, transmisiones de enlace ascendente de una estación móvil, y señales GPS.
5. Un sistema móvil según la reivindicación 4, donde la plataforma móvil incluye además un enlace de comunicaciones inalámbricas (360) configurado para proporcionar señales de orden y control a la LMU móvil.
6. Un sistema móvil según la reivindicación 1, donde la plataforma móvil incluye además un dispositivo de formación de imágenes (350) .
7. Un sistema móvil según la reivindicación 6, incluyendo además medios para asociar la posición de la estación móvil con imágenes obtenidas por dicho dispositivo de formación de imágenes.
8. Un sistema móvil según la reivindicación 6, donde el dispositivo de formación de imágenes (350) está configurado para proporcionar imágenes de infrarrojos.
9. Un sistema de localización inalámbrica mejorado con LMU móvil, WLS (200) incluyendo: el sistema móvil de la reivindicación 1; y
una pluralidad de unidades de medición de posición estacionarias, LMUs (120) , superpuestas en un sistema comercial de comunicaciones inalámbricas de tal manera que dicha pluralidad de LMUs estacionarias (120) estén cosituadas con respectivas estaciones transceptoras base, BTSs (140) , de dicho sistema de comunicaciones inalámbricas.
10. Un WLS según la reivindicación 9, donde dicho sistema móvil incluye un avión.
11. Un WLS según la reivindicación 9, donde dicho sistema móvil incluye un vehículo con base en tierra.
12. Un WLS según la reivindicación 9, donde el sistema móvil incluye además antenas (370, 380) y receptores (320, 340) configurados para recibir transmisiones de enlace descendente de una estación base (140) , transmisiones de enlace ascendente de una estación móvil, y señales GPS.
13. Un WLS según la reivindicación 9, donde el sistema móvil también incluye un enlace de comunicaciones inalámbricas (226, 360) configurado para recibir señales de orden y control de una estación de tierra y para proporcionar dichas señales de orden y control a la LMU móvil (225, 330) .
14. Un WLS según la reivindicación 9, donde dicho sistema móvil incluye un avión;
incluyendo además al menos una LMU estacionaria (120) en una posición conocida, donde la al menos única LMU estacionaria (120) y la LMU móvil (330) están configuradas de modo que estén sincronizadas en tiempo y frecuencia una con otra;
donde dicha al menos única LMU estacionaria (120) está cosituada con equipo de lugar de celda (110) para permitir
que compartan recursos incluyendo una antena, recintos de ambiente controlado, potencia, y recursos de comunicaciones de retroceso;
donde la LMU móvil (330) y la LMU estacionaria (120) están configuradas para recibir transmisiones de radio frecuencia, RF, de dispositivos inalámbricos en un período de tiempo para permitir la determinación de su posición y velocidad mediante procesado de diferencia de tiempo de llegada, TDOA, y diferencia de frecuencia de llegada, FDOA; donde, para la determinación de la posición y velocidad de dispositivos inalámbricos mediante procesado TDOA y FDOA, el sistema está configurado de tal manera que una pluralidad de LMUs reciban una señal del dispositivo inalámbrico en un período de tiempo y que la posición y velocidad de cada LMU sean conocidas durante el tiempo que la señal se esté recibiendo;
donde el sistema móvil incluye antenas (370, 380) y receptores (320, 340) configurados para recibir transmisiones de enlace descendente de una estación base, transmisiones de enlace ascendente de una estación móvil, y señales GPS;
donde el sistema móvil incluye además un enlace de comunicaciones inalámbricas (360) configurado para recibir señales de orden y control de una estación de tierra (160) y para proporcionar dichas señales de orden y control a la LMU móvil (330) ;
donde el sistema móvil incluye un dispositivo de formación de imágenes (350) configurado para proporcionar imágenes de la zona geográfica en la que está desplegado un dispositivo inalámbrico a localizar; e incluyendo además medios para asociar la posición del dispositivo inalámbrico proporcionado por el WLS (200) con las imágenes.
15. Un WLS según la reivindicación 9, incluyendo medios para recibir (380) una señal de enlace descendente de un controlador de red y para derivar dicha réplica de dicha señal de enlace descendente.
16. Un WLS según la reivindicación 9, incluyendo además al menos una LMU estacionaria (120) en una posición conocida, donde la al menos única LMU estacionaria (120) y la LMU móvil (225, 330) están configuradas de manera que estén sincronizadas en tiempo y frecuencia una con otra.
17. Un WLS según la reivindicación 16, donde dicha al menos única LMU estacionaria (120) está cosituada con equipo de lugar de celda (110) para permitir que compartan recursos incluyendo una antena, recintos de ambiente controlado, potencia, y recursos de comunicaciones de retroceso.
18. Un WLS según la reivindicación 16, donde la LMU móvil (225, 330) y la LMU estacionaria (120) están configuradas para recibir transmisiones de radio frecuencia, RF, de dispositivos inalámbricos en un período de tiempo para permitir la determinación de su posición y velocidad mediante procesado de diferencia de tiempo de llegada, TDOA, y diferencia de frecuencia de llegada, FDOA.
19. Un WLS según la reivindicación 18, donde, para la determinación de la posición y velocidad de dispositivos inalámbricos mediante procesado TDOA y FDOA, el sistema (200) está configurado de tal manera que una pluralidad de LMUs reciban una señal del dispositivo inalámbrico en un período de tiempo y que la posición y velocidad de cada LMU sea conocida durante el tiempo en el que la señal se esté recibiendo.
20. Un WLS según la reivindicación 9, donde al menos una plataforma móvil incluye un dispositivo de formación de imágenes (350) configurado para proporcionar imágenes de la zona geográfica en la que está desplegado un dispositivo inalámbrico a localizar.
21. Un WLS según la reivindicación 20, incluyendo además medios para asociar la posición del dispositivo inalámbrico proporcionada por el WLS con las imágenes, por lo que se obtiene información adicional acerca de la posición del dispositivo inalámbrico.
22. Un WLS según la reivindicación 20, donde el dispositivo de formación de imágenes (350) es capaz de formación de imágenes por infrarrojos.
23. Un método para localizar una estación móvil, MS, que opera dentro de una región cubierta por un sistema de localización inalámbrica, WLS (200) , incluyendo:
recibir una transmisión de la MS en al menos tres lugares de recogida de señal geográficamente separados, incluyendo al menos una unidad de medición de posición móvil, LMU (225, 330) ;
transmitir una señal de enlace descendente desde al menos un lugar de recogida de señal o controlador de red, incluyendo dicha señal de enlace descendente datos que permiten que dicha LMU móvil (225, 330) , después de recibir dicha señal de enlace descendente, derive una réplica de dicha transmisión de la MS recibida en un lugar de recogida de señal;
en dicha LMU móvil (225, 330) , realizar procesado de correlación en dicha réplica y la transmisión de la MS recibida en la LMU móvil para determinar datos de tiempo de llegada, TOA, y diferencia de tiempo de llegada, TDOA, en dicha LMU móvil (225, 330) ; y
usar los datos TOA y TDOA determinados en la LMU móvil (225, 330) para estimar una posición de la MS.
24. Un método según la reivindicación 23, incluyendo además proporcionar imágenes de la zona que rodea la
posición de la MS para comparación con la posición estimada de la MS. 10
25. Un método según la reivindicación 24, donde las imágenes son registradas y guardadas.
26. Un método según la reivindicación 23, incluyendo además proporcionar un tiempo y referencia de frecuencia así
como una posición tridimensional y velocidad de la LMU móvil (225, 330) a través del uso de un módulo GPS 15 montado en la plataforma móvil.
27. Un método según la reivindicación 26, incluyendo además compensar la posición tridimensional y la velocidad de la LMU móvil (225, 330) al estimar la posición de la MS usando diferencia de tiempo de llegada, TDOA.
28. Un método según la reivindicación 23, incluyendo además digitalizar y almacenar la transmisión MS recibida por la LMU móvil, y luego correlacionar la transmisión almacenada con una réplica de la transmisión MS.
29. Un método según la reivindicación 28, incluyendo además derivar dicha réplica de una transmisión de enlace
descendente de una estación transceptora base. 25
30. Un método según la reivindicación 28, incluyendo además derivar dicha réplica de una transmisión de enlace descendente de un controlador de red.
Patentes similares o relacionadas:
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
Mitigación de distorsiones multitrayectoria para geolocalización basada en TDOA, del 26 de Junio de 2019, de Elbit Systems Bmd and Land EW - Elisra Ltd: Un método para determinar una localización de un transmisor de radiofrecuencia RF en la presencia de interferencia multitrayectoria, comprendiendo el método los procedimientos […]
Sistema de localización geográfica de un emisor de señales radioeléctricas situado en la superficie de la Tierra y procedimiento asociado de interferometría distribuida, del 13 de Junio de 2019, de THALES: Sistema de localización geográfica de al menos un emisor (ES) de señales radioeléctricas situado en la superficie de la Tierra, que comprende: […]
Sistema de tratamiento de señales procedentes de un emisor con fines de datación de señales y de localización del emisor y estación de recepción asociada, del 19 de Febrero de 2019, de ZODIAC DATA SYSTEMS: Estación de recepción (1x) de un sistema de tratamiento de señales procedentes de un emisor a localizar, estando la estación de recepción (1x) […]
Aparato, procedimiento y programa informático para proporcionar una frontera virtual, del 11 de Enero de 2017, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema , que comprende: un sistema de localización geográfica en tiempo real que comprende una pluralidad de receptores que rodean un área bajo […]
Procedimiento y sistema de calibración de receptores y localización de objetos simultáneas para multilateración, del 23 de Noviembre de 2016, de KARLSRUHER INSTITUT FUR TECHNOLOGIE: Un procedimiento de multilateración de al menos uno de una pluralidad de P objetos, que usa: una pluralidad de N sensores ubicados en posiciones conocidas […]
Métodos y aparatos para alterar el tiempo de medición y el ancho de banda durante una medición, del 14 de Septiembre de 2016, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para un equipo de usuario para manejar un cambio de célula, estando el equipo de usuario comprendido en una red de comunicaciones […]
Geolocalización de emisores, del 10 de Agosto de 2016, de SELEX ES LTD: Método para localizar un emisor de ondas electromagnéticas utilizando una pluralidad de receptores, comprendiendo el método las etapas de: […]