Aparato y método de obtención de imágenes para estabilización óptica mejorada durante el barrido de una cámara.
Método para controlar un aparato de obtención de imágenes a efectos de realizar una corrección de movimientos bruscos (100),
comprendiendo el método:
recibir una salida desde un detector de movimientos bruscos (101), siendo dicho detector de movimientos bruscos un sensor de velocidad angular;
obtener un vector de movimiento a partir de una correlación de una imagen con una imagen anterior captada 10 mediante el aparato de obtención de imágenes (100);
integrar el vector de movimiento utilizando un filtro de paso bajo o añadiendo los vectores de movimiento obtenidos para cada unidad de tiempo;
realizar una primera etapa de determinación (S11) para determinar si el aparato de obtención de imágenes (100) está en un estado de barrido en base a la salida del detector de movimientos bruscos (101);
realizar una segunda etapa de determinación (S13) que comprende determinar si el aparato de obtención de imágenes (100) está en el estado de barrido en base al valor integrado del vector de movimiento;
en el caso de que se determine en una, al menos, de la primera etapa de determinación (S11) y de la segunda etapa de determinación (S13) que el aparato de obtención de imágenes está en el estado de barrido, realizar (S16) un control del barrido para impedir que la operación de barrido llevada a cabo por el usuario sea corregida como movimiento brusco; y en el caso de que se determine tanto en la primera etapa de determinación (S11) como en la segunda etapa de determinación (S13) que el aparato de obtención de imágenes ya no está en el estado de barrido, finalizar (S15) el control del barrido.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09179918.
Solicitante: CANON KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 30-2, SHIMOMARUKO 3-CHOME OHTA-KU TOKYO 146-8501 JAPON.
Inventor/es: Miyasako,Kenichi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
PDF original: ES-2380431_T3.pdf
Fragmento de la descripción:
Aparato y método de obtención de imágenes para estabilización óptica mejorada durante el barrido de una cámara
ANTECEDENTES DE LA INVENCIÓN
Sector técnico de la invención La presente invención se refiere a un aparato de obtención de imágenes, tal como una videocámara, que tiene una función para corregir ópticamente una imagen desenfocada, causada por un movimiento brusco de la cámara, para impedir el efecto borroso de una imagen captada mediante dicho aparato de obtención de imágenes.
Descripción de la técnica relacionada En los aparatos de obtención de imágenes, tales como una videocámara, se han conseguido la automatización y la multifuncionalidad en varios puntos tales como exposición automática (AE) y enfoque automático (AF) , de manera que se pueden obtener fácilmente imágenes satisfactorias.
En los últimos años, los movimientos bruscos aplicados al aparato de obtención de imágenes han sido una causa principal del deterioro de la calidad de la imagen captada, dado que los aparatos de obtención de imágenes se han reducido en tamaño y se ha elevado el aumento de los sistemas ópticos. Se han propuesto diversos tipos de funciones de estabilización de imagen (corrección de movimientos bruscos de la cámara) para mejorar el efecto borroso en la imagen captada, causado por el movimiento brusco aplicado al aparato de obtención de imágenes. Un ejemplo se puede encontrar en el documento U.S.A. 6.734.901. Dicha función de estabilización de imagen está incorporada en el aparato de obtención de imágenes, de manera que se pueden obtener fácilmente imágenes mejores.
Un ejemplo del aparato de obtención de imágenes que tiene la función de estabilización de imagen es una cámara que tiene la configuración mostrada en la figura 6.
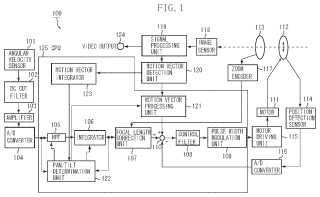
En un aparato de obtención de imágenes -200- que tiene una función de estabilización de imagen, un sensor de velocidad angular (o "detector de movimientos bruscos") -201- está fijado al cuerpo principal de dicho aparato de obtención de imágenes, y detecta un movimiento brusco aplicado al aparato de obtención de imágenes -200- como una velocidad angular. Un filtro de corte de corriente continua (CC) -202- corta una componente CC de una salida de la señal de velocidad angular desde el sensor de velocidad angular -201-, y hace pasar solamente una componente de corriente alterna (CA) , es decir, una componente de la vibración.
Un amplificador -203- amplifica la señal de velocidad angular que ha pasado a través del filtro de corte CC -202para tener sensibilidad adecuada, y emite la señal amplificada de velocidad angular. Un convertidor analógico-digital (A/D) -204- digitaliza la salida de la señal de velocidad angular desde el amplificador -203-, y emite la señal digitalizada de velocidad angular.
Un microordenador (uCOM) -223-, por ejemplo, funciona como un filtro de paso alto (HPF) -205-, un integrador -206-, una unidad de determinación de barrido/inclinación -222-, un filtro de control -208-, una unidad de modulación en anchura de impulsos -209-, una unidad de corrección de distancias focales -207- y una unidad de procesamiento de vectores de movimiento -221-.
El HPF -205- tiene una función para cambiar las características de frecuencia de corte en cualquier banda de frecuencia, y corta una componente de baja frecuencia incluida en la salida de la señal digitalizada de velocidad angular (datos de velocidad angular) desde el convertidor A/D -204-, y emite los datos de velocidad angular. El integrador -206- tiene una función para cambiar las características de frecuencia en cualquier banda de frecuencia, e integra la salida de datos de velocidad angular desde el HPF -205-, y emite el resultado de la integración como datos de desplazamiento angular.
La unidad de corrección de distancias focales -207- adquiere información de la posición actual del zoom a partir de un codificador de zoom -217-para detectar una posición del zoom en un sistema óptico de obtención de imágenes -213-, a efectos de realizar operaciones de zoom y enfoque, calcula una distancia focal a partir de la información y calcula una magnitud de accionamiento (datos de corrección con base de giróscopo) de un sistema óptico de corrección -212- a partir de la información que se refiere a la distancia focal y a los datos de desplazamiento angular anteriormente mencionados.
En el sensor de velocidad angular -201-, que utiliza un giróscopo de vibración o similar, las propiedades de detección de velocidades angulares se degradan en una frecuencia baja de 1 Hz o menos. En esta banda de baja frecuencia, por lo tanto, el efecto de un error de corrección llega a ser significativo. Como consecuencia, no se puede corregir suficientemente un movimiento brusco no corregido de la imagen en una banda de baja frecuencia, y la calidad de la imagen se deteriora.
El aparato de obtención de imágenes -200- incluye además una unidad para detectar el movimiento brusco restante de la imagen captada, además de detectar una velocidad angular, es decir, una unidad de detección de vectores de movimiento -220-, que detecta el movimiento brusco restante de la imagen en la banda de baja frecuencia y corrige el movimiento brusco restante de la imagen, para mejorar el rendimiento de la corrección tal como se describe a continuación.
La unidad de detección de vectores de movimiento -220- detecta, a partir de la información que se refiere a la imagen captada, obtenida mediante un sensor de imagen -218- en el aparato de obtención de imágenes -200-, un vector de movimiento de la imagen en base a una señal de luminancia incluida en una señal de vídeo generada por una unidad de procesamiento de señales -219-. La unidad de procesamiento de señales -219- genera una señal de vídeo adaptada, por ejemplo, a un formato del National Television System Committe (NTSC) . La unidad de procesamiento de vectores de movimiento -221- convierte el vector de movimiento detectado mediante la unidad de detección de vectores de movimiento -220- en una magnitud de accionamiento (datos de corrección con base de vector) del sistema óptico de corrección -212-.
Los datos de corrección con base de vector son una señal para corregir el movimiento brusco restante de la imagen en la banda de baja frecuencia. Los datos de corrección con base de vector añadidos a los datos de corrección con base de giróscopo anteriormente mencionados llegan a ser una magnitud final de accionamiento (datos de corrección finales) del sistema óptico de corrección -212- para realizar la corrección de movimientos bruscos en toda la banda de frecuencia, desde la banda de baja frecuencia hasta una banda de alta frecuencia.
Una diferencia entre los datos de corrección finales y un valor (datos de detección de posiciones) obtenido digitalizando una salida de un sensor de detección de posiciones -214- para detectar la posición del sistema óptico de corrección -212- en un convertidor A/D -216- se introduce en el filtro de control -208-. La unidad de modulación en anchura de impulsos -209- convierte una salida del filtro de control -208- en una señal de modulación en anchura de impulsos (PWM) y emite la señal PWM.
Una unidad -215- de accionamiento del motor acciona un motor -211- para desplazar el sistema óptico de corrección -212- en base a la señal PWM desde la unidad de modulación en anchura de impulsos -209-, y cambia un eje óptico de la luz que incide en una superficie de obtención de imágenes, para corregir ópticamente un movimiento brusco de la imagen captada.
La unidad de determinación de barrido/inclinación -222- determina el barrido/inclinación en base a la salida de datos de velocidad angular desde el convertidor A/D -204- y a la salida de datos de desplazamiento angular desde el integrador -206-, para llevar a cabo el control del barrido. Más específicamente, si los datos de velocidad angular son iguales o superiores a un valor umbral predeterminado, o los datos de desplazamiento angular (el resultado de la integración) son iguales o superiores a un valor umbral predeterminado, incluso si los datos de velocidad angular son menores que el valor umbral predeterminado, la unidad de determinación de barrido/inclinación -222- determina que el aparato de obtención de imágenes -200- está en un estado de barrido o en un estado de inclinación, para llevar a cabo el control del barrido.
En el control del barrido, primero, la frecuencia de corte baja del HPF -205- es desplazada hasta el lado de frecuencia superior. De esta manera,... [Seguir leyendo]
Reivindicaciones:
1. Método para controlar un aparato de obtención de imágenes a efectos de realizar una corrección de movimientos bruscos (100) , comprendiendo el método:
recibir una salida desde un detector de movimientos bruscos (101) , siendo dicho detector de movimientos bruscos un sensor de velocidad angular;
obtener un vector de movimiento a partir de una correlación de una imagen con una imagen anterior captada 10 mediante el aparato de obtención de imágenes (100) ;
integrar el vector de movimiento utilizando un filtro de paso bajo o añadiendo los vectores de movimiento obtenidos para cada unidad de tiempo;
realizar una primera etapa de determinación (S11) para determinar si el aparato de obtención de imágenes (100) está en un estado de barrido en base a la salida del detector de movimientos bruscos (101) ;
realizar una segunda etapa de determinación (S13) que comprende determinar si el aparato de obtención de imágenes (100) está en el estado de barrido en base al valor integrado del vector de movimiento;
en el caso de que se determine en una, al menos, de la primera etapa de determinación (S11) y de la segunda etapa de determinación (S13) que el aparato de obtención de imágenes está en el estado de barrido, realizar (S16) un control del barrido para impedir que la operación de barrido llevada a cabo por el usuario sea corregida como movimiento brusco; y en el caso de que se determine tanto en la primera etapa de determinación (S11) como en la segunda etapa de determinación (S13) que el aparato de obtención de imágenes ya no está en el estado de barrido, finalizar (S15) el control del barrido.
2. Método, según la reivindicación 1, que comprende además:
integrar la salida del detector de movimientos bruscos (101) utilizando un integrador (106) ; y realizar una tercera etapa de determinación (S12) para determinar si el aparato de obtención de imágenes (100) está 35 en un estado de barrido en base a la salida del integrador (106) , en el que el control del barrido (S16) se realiza si una, al menos, de las etapas de determinación primera, segunda y tercera determina que el aparato de obtención de imágenes está en un estado de barrido; y la finalización del control del barrido se realiza si las tres etapas de determinación primera, segunda y tercera determinan que el aparato de obtención de imágenes ya no está en el estado de barrido.
3. Método, según la reivindicación 1 ó 2, en el que el control del barrido finaliza (S15) cuando se determina (S14)
que el aparato de obtención de imágenes no ha estado en el estado de barrido durante un período predeterminado 45 de tiempo.
4. Método, según la reivindicación 1, 2 ó 3, que comprende además:
determinar (S21) si se está realizando el control del barrido; y 50 si se determina que se está realizando el control del barrido, realizar la segunda etapa de determinación (S13; S24) , y si se determina en la segunda etapa de determinación (S13; S24) que el aparato de obtención de imágenes (100) 55 está en un estado de barrido, seguir (S27) para realizar el control del barrido; y si se determina en la segunda etapa de determinación (S13; S24) que el aparato de obtención de imágenes no está en un estado de barrido, finalizar (S26) el control del barrido.
60 5. Método, según la reivindicación 2, que comprende además:
determinar (S21) si se está realizando el control del barrido; y si no se está realizando el control del barrido, realizar la primera etapa de determinación (S11; S22) , y 65 si se determina en la primera etapa de determinación (S11; S22) que el aparato de obtención de imágenes está en un estado de barrido, realizar (S27) el control del barrido; y si se determina en la primera etapa de determinación (S11; S22) que el aparato de obtención de imágenes no está 5 en un estado de barrido, realizar la tercera etapa de determinación (S12; S23) , y si se determina en la tercera etapa de determinación (S12; S23) que el aparato de obtención de imágenes está en un estado de barrido, realizar (S27) el control del barrido.
6. Método, según cualquiera de las reivindicaciones anteriores, en el que:
la primera etapa de determinación (S11; S22) comprende determinar si un valor de salida del detector de movimientos bruscos (101) es mayor que un valor predeterminado;
la segunda etapa de determinación (S13; S24) comprende determinar si el valor integrado del vector de movimiento es mayor que un valor predeterminado; y si el primer valor determinado o el segundo valor determinado es mayor que su valor predeterminado respectivo, se determina que el aparato de obtención de imágenes (100) está en un estado de barrido. 20
7. Método, según la reivindicación 2, en el que además:
la tercera etapa de determinación (S12; S23) comprende determinar si un valor filtrado e integrado de una salida del detector de movimientos bruscos (101) es mayor que un valor predeterminado, y en el que si el valor filtrado e integrado es mayor que su valor predeterminado respectivo, se determina que el aparato de obtención de imágenes (100) está en un estado de barrido.
8. Método, según cualquiera de las reivindicaciones anteriores, que comprende además limitar una banda de frecuencia de la salida del detector de movimientos bruscos (101) utilizando un filtro (105) , en el que el control del barrido comprende aumentar una frecuencia de corte del filtro (105) , y en el que finalizar el control del barrido comprende devolver la frecuencia de corte del filtro (105) a la frecuencia que existía antes de que se realizase el control del barrido. 35
9. Método, según cualquiera de las reivindicaciones anteriores, que comprende además integrar la salida del detector de movimientos bruscos (101) utilizando un integrador (106) , en el que el control del barrido comprende reducir una constante temporal del integrador (106) . 40
10. Método, según una de las reivindicaciones 1 a 7, que comprende además limitar una banda de frecuencia de la salida del detector de movimientos bruscos utilizando un filtro (105) e integrar la salida del filtro (105) utilizando un integrador (106) , 45 en el que el control del barrido comprende aumentar una frecuencia de corte del filtro (105) y reducir una constante temporal del integrador (106) .
11. Método, según cualquiera de las reivindicaciones anteriores, que comprende además convertir el vector de movimiento en una magnitud de corrección de vectores para ser utilizada en la corrección de movimientos bruscos 50 de una imagen de salida del aparato de obtención de imágenes (100) ,
en el que el control del barrido (S16) comprende impedir o reducir una salida de la magnitud de corrección de vectores; y 55 terminar (S15) el control del barrido comprende reanudar la salida de la magnitud de corrección de vectores hasta una salida de magnitud que existía antes del control del barrido.
12. Aparato de obtención de imágenes (100) , que comprende:
60 un detector de velocidades angulares (101) para detectar cualquier velocidad angular aplicada al aparato de obtención de imágenes (100) ;
un detector de vectores de movimiento (120) para obtener un vector de movimiento a partir de una correlación de una imagen con una imagen anterior captada mediante el aparato de obtención de imágenes (100) ; 65
primeros medios de integración (123) para integrar utilizando un filtro de paso bajo o añadiendo los vectores de movimiento obtenidos mediante el detector de vectores (120) para cada unidad de tiempo; y medios de determinación (122) para determinar si el aparato de obtención de imágenes está en un estado de barrido 5 en base a una salida del detector de velocidades angulares (101) ;
en el que los medios de determinación (122) están configurados además para determinar si el aparato de obtención de imágenes está en el estado de barrido en base a la salida de los primeros medios de integración (123) ;
y el aparato de obtención de imágenes (100) comprende además un controlador para realizar una corrección de movimientos bruscos de acuerdo con el control del barrido a efectos de impedir que la operación de barrido llevada a cabo por el usuario sea corregida como movimiento brusco cuando los medios de determinación (122) determinan que el aparato de obtención de imágenes está en un estado de barrido en base a una, al menos, de la salida del detector de velocidades angulares (101) y de la salida de los primeros medios de integración (123) , en el que el controlador está configurado además para finalizar el control del barrido cuando los medios de determinación determinan, a partir tanto de la salida del detector de velocidades angulares (101) como de la salida de los primeros medios de integración (123) , que el aparato de obtención de imágenes (100) ya no está en el estado de barrido.
13. Aparato de obtención de imágenes, según la reivindicación 12, que comprende además unos segundos medios de integración (106) para integrar la salida del detector de velocidades angulares (101) , en el que los medios de determinación (122) están configurados para determinar que el aparato de obtención de imágenes (100) está en un estado de barrido a partir de una salida desde uno, al menos, del detector de velocidades angulares (101) , de los primeros medios de integración (123) y de los segundos medios de integración (106) ; y los medios de determinación (122) están configurados para determinar que el aparato de obtención de imágenes ya no está en un estado de barrido a partir de salidas desde la totalidad del detector de velocidades angulares (101) , de los primeros medios de integración (123) y de los segundos medios de integración (106) .
14. Aparato de obtención de imágenes (100) , según la reivindicación 12 ó 13, que comprende además:
un filtro (105) para limitar una banda de frecuencia de la salida del detector de velocidades angulares (101) ,
en el que el controlador está configurado para aumentar una frecuencia de corte del filtro (105) cuando se realiza el control del barrido, y para devolver la frecuencia de corte del filtro (105) a la frecuencia de corte del filtro que existía antes de que se realizase el control del barrido, cuando finaliza el control del barrido.
15. Aparato de obtención de imágenes (100) , según cualquiera de las reivindicaciones 12 a 14, en el que el controlador está configurado para finalizar el control del barrido cuando el aparato de obtención de imágenes no ha estado en el estado de barrido durante un período predeterminado de tiempo.
45 16. Aparato de obtención de imágenes (100) , según la reivindicación 13 o cualquiera de las reivindicaciones 14 ó 15, cuando sean dependientes de la reivindicación 13, en el que el controlador está configurado para realizar el control del barrido cuando la salida desde uno, al menos, del detector de velocidades angulares (101) , de los primeros medios de integración (123) y de los segundos medios de integración (106) es mayor que un valor predeterminado respectivo.
17. Aparato de obtención de imágenes (100) , según la reivindicación 13 o cualquiera de las reivindicaciones 14 a 16, cuando sean dependientes de la reivindicación 13, en el que el controlador está configurado para reducir una constante temporal de los segundos medios de integración (106) cuando se realiza el control del barrido, y para devolver la constante temporal de los segundos medios de integración (106) a la constante temporal de los 55 segundos medios de integración (106) que existía antes de que se realizase el control del barrido, cuando finaliza el control del barrido.
18. Aparato de obtención de imágenes (100) , según cualquiera de las reivindicaciones 12 a 17, que comprende además:
60 medios de conversión (121) para convertir el vector de movimiento obtenido mediante el detector de vectores de movimiento (120) en una magnitud de corrección de vectores para ser utilizada en la corrección de movimientos bruscos, en el que el controlador está configurado para impedir o reducir la magnitud de corrección de vectores cuando se realiza el control del barrido y, cuando finaliza el control del barrido, para devolver la magnitud de corrección de vectores a una magnitud que existía antes de que se realizase el control del barrido.
Patentes similares o relacionadas:
Retenedor para dispositivo de aumento electrónico, del 15 de Julio de 2020, de FREEDOM SCIENTIFIC INC.: Un dispositivo de aumento para su uso por usuarios ciegos o con baja visión, incluyendo el dispositivo de aumento una mesa que tiene un borde delantero, […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Dispositivo que comprende un dispositivo de imágenes multicanal y procedimiento para producirlo, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un dispositivo que comprende: una carcasa que tiene una primera área transparente (14a) y una segunda área transparente (14b); […]
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Enfoque para escena de fuente de luz puntual, del 15 de Abril de 2020, de Zhejiang Uniview Technologies Co., Ltd: Un procedimiento de enfoque, que comprende: establecer posiciones de una lente de enfoque secuencialmente; registrar información estadística […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimiento y aparato de grabación de imagen de vídeo en un terminal portátil que tiene doble cámara, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de grabación de vídeo por un terminal portátil de doble cámara , que comprende: emitir un primer flujo de vídeo capturado por una primera […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]