Aparato para transportar una carga desde un primer nivel hasta un segundo nivel, en particular un salvaescaleras.
Aparato (1) para transportar una carga desde un primer nivel hasta un segundo nivel,
en particular unsalvaescaleras, comprendiendo:
un bastidor (9) que puede desplazarse a lo largo de un raíl (3) y que está provisto con medios (15) de soporte y guíay medios (16) dispuestos para engranar en el raíl (3),
un portador de carga (10) montado en el mencionado bastidor (9), y medios (70) para mantener el portador de carga(10) en una posición predeterminada con respecto a la dirección de la gravedad, comprendiendo esos medios demantenimiento de la posición como mínimo un motor de ajuste (71) dispuesto para mover el portador de carga (10)con respecto al bastidor (9), un sistema de control (78) para controlar el motor de ajuste (71) de manera que ocurreuna rotación correccional, y sensores (73, 74,75) conectados con el mismo dispuestos para generar señales alsistema de control (78), caracterizado porque los mencionados sensores (73, 74,75) comprenden un acelerómetro(75) montado en el portador de carga (10) y un giróscopo (74) montado en el portador de carga (10), y el sistema decontrol (78) está dispuesto para calcular el valor de la desviación del portador de carga (10) respecto de laaceleración de la gravedad a partir de la señal del acelerómetro (75) y para usar el mencionado valor para manteneral portador de carga (10) en la posición predeterminada, en donde el sistema de control (78) está dispuesto paracombinar la señal del acelerómetro (75) con la señal del giróscopo (74), de tal manera que se calcula un segundovalor de desviación del portador de carga (10) respecto de la aceleración de la gravedad, en donde el sistema decontrol (78) está dispuesto además para utilizar el mencionado segundo valor de la desviación del portador de carga(10) respecto de la aceleración de la gravedad para controlar el motor de ajuste (71).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10152426.
Solicitante: OTTO OOMS B.V.
Nacionalidad solicitante: Países Bajos.
Dirección: LEKDIJK OOST 27A 2861 GB BERGAMBACHT PAISES BAJOS.
Inventor/es: RAMAKER, ANTONIUS EVERARDUS THEODORUS JOZEF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66B9/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › B66B 9/00 Clases o tipos de ascensores instalados en los edificios o adyacentes a éstos (caracterizados por el sistema de control B66B 1/00). › combinados a escaleras, p. ej. para transportar personas inválidas.
PDF original: ES-2388719_T3.pdf
Fragmento de la descripción:
Aparato para transportar una carga desde un primer nivel hasta un segundo nivel, en particular un salvaescaleras.
El invento se refiere a un aparato para transportar una carga desde un primer nivel hasta un segundo nivel, en particular a un salvaescaleras, de acuerdo con el preámbulo de la reivindicación 1.
Un aparato de este tipo está descrito en el documento WO 99/46 198 y en el documento GB -A -2 358 389. En el documento GB -A -2 358 389 un giróscopo montado en el bastidor mide el ratio de inclinación del bastidor y genera una inclinación igual y opuesta en el asiento, manteniendo así el nivel del asiento. Para mejorar la exactitud y para mantener largo tiempo la horizontalidad un péndulo (acelerómetro) está fijo al asiento con el fin de dar una medida absoluta de la posición angular del asiento. Sin embargo el péndulo fijo al asiento es sensible no sólo a la rotación del portador, sino también al movimiento lineal del carro. Con el fin de disminuir la reactividad del sistema al movimiento lineal del carro se ajusta baja la sensibilidad de la unidad de control a la señal del péndulo.
El invento tiene como objeto el proporcionar un aparato de transporte del tipo anteriormente descrito y que sea más exacto y/o de mejor respuesta y/o eficiente y/o estable.
De acuerdo con el invento, esto se obtiene por el aparato de la reivindicación 1. Un giróscopo debe ser interpretado como cualquier dispositivo que está dispuesto para sentir la velocidad angular, y un acelerómetro es un dispositivo que está dispuesto para medir un ángulo.
El sistema de control está dispuesto para calcular el valor de la desviación del portador de carga respecto de la aceleración de la gravedad a partir de la señal del acelerómetro y para utilizar el mencionado valor para mantener el portador de carga en la posición predeterminada, en donde el sistema de control está dispuesto para combinar la señal del acelerómetro con la señal del giróscopo de tal manera que se calcula un segundo valor de desviación del portador de carga a partir de la aceleración de la gravedad. El sistema de control está dispuesto además para utilizar el mencionado segundo valor de desviación del portador de carga respecto de la aceleración de la gravedad para controlar el motor de ajuste. Una ventaja de una disposición como esta del sistema de control es que el mencionado segundo valor de desviación del portador de carga respecto de la aceleración de la gravedad es una señal más exacta y/o estable que el valor derivado de la señal del acelerómetro sólo.
Preferiblemente, el sistema de control comprende además un amplificador que está dispuesto para amplificar la señal del giróscopo antes de que se combine con la señal del acelerómetro, en donde preferiblemente el amplificador tiene una ganancia en un rango de 5-15, preferiblemente en un rango de 8-12, y todavía más preferiblemente en un rango de 9, 5 -10, 5.
Preferiblemente el sistema de control comprende además un filtro de paso bajo que está dispuesto para filtrar la señal combinada del giróscopo y el acelerómetro, en donde preferiblemente el filtro de paso bajo tiene una frecuencia de corte en un rango de 0, 01 -0, 03 Hz, más preferiblemente en un rango de 0, 013 -0, 02 Hz, y todavía más preferiblemente en un rango de 0, 015 -0, 017 Hz.
Preferiblemente el sistema de control comprende además un filtro de paso alto que está dispuesto para filtrar la señal combinada del giróscopo y el acelerómetro filtrada, en donde preferiblemente, el filtro de paso alto tiene una frecuencia de corte en un rango de 0, 01 -0, 03 Hz, más preferiblemente en un rango de 0, 013 -0, 02 Hz, y aún más preferiblemente en un rango de 0, 015 -0, 017 Hz.
Preferiblemente el sistema de control comprende además un segundo filtro de paso bajo que está dispuesto para filtrar la señal del acelerómetro, en donde preferiblemente el segundo filtro de paso bajo filtra frecuencias en un rango de 0, 01 -0, 03 Hz, más preferiblemente en un rango de 0, 013 -0, 02 Hz, y aún más preferiblemente en un rango de 0, 015 -0, 017 Hz. Una ventaja del mencionado segundo filtro de paso bajo es que se reducen las señales de alta frecuencia debidas a la aceleración lineal (por ejemplo debida a choques) .
Preferiblemente el sistema de control está dispuesto para combinar la señal combinada del giróscopo y el acelerómetro doblemente filtrada y la señal filtrada del acelerómetro, en donde preferiblemente, el sistema de control está dispuesto además para sustraer esta señal combinada de un valor predeterminado de desviación del portador de carga respecto de la aceleración de la gravedad, y en donde preferiblemente, el sistema de control comprende además un controlador PI que está dispuesto para determinar la rotación correccional necesaria con el fin de alcanzar el valor predeterminado de desviación del portador de carga respecto de la aceleración de la gravedad.
Preferiblemente los mencionados sensores comprenden además un segundo giróscopo montado en el bastidor, en donde preferiblemente, el sistema de control está dispuesto para utilizar la señal del segundo giróscopo para controlar el motor de ajuste de manera que ocurra una rotación correccional. Una ventaja del mencionado segundo giróscopo es que el sistema de control está dispuesto de tal manera que tan pronto como el mencionado segundo giróscopo detecta una velocidad angular de rotación el motor de ajuste arrancará una contra rotación correccional de la misma velocidad angular.
Ahora el invento está explicado sobre la base de dos configuraciones, haciéndose referencia al dibujo adjunto en el cual componentes correspondientes están designados con numerales de referencia aumentados en 100, y en el cual:
Fig. 1 muestra una vista en perspectiva frontal de una instalación salvaescaleras de acuerdo con una primera configuración del invento,
Fig. 2 muestra una vista posterior en perspectiva parcialmente seccionada de una parte de la instalación salvaescaleras de la figura 1,
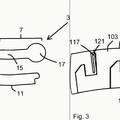
Fig. 3 muestra una vista lateral de acuerdo con la flecha III en la figura 2,
Fig. 4 es una vista posterior en perspectiva parcialmente seccionada de la instalación salvaescaleras de la figura 1 en una curva del raíl,
Fig. 5 es una vista posterior en perspectiva parcialmente seccionada de una configuración alternativa de la instalación salvaescaleras,
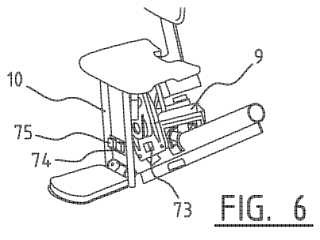
Fig. 6 es una vista frontal en perspectiva de la instalación salvaescaleras de las figuras 1-4 con un número de sensores para determinar la posición del portador de carga, y
Fig. 7 muestra un diagrama de bloques de un sistema para mantener la posición del portador de carga.
Figs. 8 a, b, c, d, muestran un diagrama de bloques del sistema de control electrónico para procesar las entradas de los sensores y controlar el motor de ajuste.
Una instalación 1 para transportar una carga desde un primer nivel hasta un segundo nivel (figura 1) , en la configuración mostrada una instalación salvaescaleras, comprende un raíl que está situado a lo largo de una caja de escalera 2 y el cual incluye un ángulo m con la horizontal H, y un aparato 4 que puede moverse a lo largo del ra
íl 3 para transportar la carga entre los diferentes niveles, aquí por ello un salvaescaleras. El raíl 3 que en la configuración mostrada tiene una sección transversal redonda, está soportado por un número de postes 5 que están dispuestos distribuidos a lo largo de la caja de escalera 2 y que están fijos a una parte 6 sobresaliente que se extiende a lo largo del raíl 3 (figura 2) . La función de esta parte 6 sobresaliente esta explicada más abajo. Además el raíl 3 está provisto con una parte impulsora aquí en forma de un rack engranaje 8 que tiene una sección transversal redonda.
El salvaescaleras 4 comprende un bastidor 9 que es desplazable a lo largo del raíl 3 y en el cual está montado el portador de carga 10, aquí en forma de una silla con un asiento 11, un respaldo 12, apoyabrazos 13 y un soporte para pies 14. La silla 10 está conectada al bastidor 9 para poder pivotar sobre un eje horizontal 45 (figura 3) , y dispuesto en el bastidor 9 y portador 10 hay un mecanismo de mantenimiento 70 que será explicado más adelante y consistiendo de, entre otras partes, un motor de ajuste 71 conectado al eje 45 de manera que la posición de la silla 10 puede ser mantenida constante en cualquier momento independientemente... [Seguir leyendo]
Reivindicaciones:
1. Aparato (1) para transportar una carga desde un primer nivel hasta un segundo nivel, en particular un salvaescaleras, comprendiendo:
un bastidor (9) que puede desplazarse a lo largo de un raíl (3) y que está provisto con medios (15) de soporte y guía y medios (16) dispuestos para engranar en el raíl (3) ,
un portador de carga (10) montado en el mencionado bastidor (9) , y medios (70) para mantener el portador de carga
(10) en una posición predeterminada con respecto a la dirección de la gravedad, comprendiendo esos medios de mantenimiento de la posición como mínimo un motor de ajuste (71) dispuesto para mover el portador de carga (10) con respecto al bastidor (9) , un sistema de control (78) para controlar el motor de ajuste (71) de manera que ocurre una rotación correccional, y sensores (73, 74, 75) conectados con el mismo dispuestos para generar señales al sistema de control (78) , caracterizado porque los mencionados sensores (73, 74, 75) comprenden un acelerómetro
(75) montado en el portador de carga (10) y un giróscopo (74) montado en el portador de carga (10) , y el sistema de control (78) está dispuesto para calcular el valor de la desviación del portador de carga (10) respecto de la aceleración de la gravedad a partir de la señal del acelerómetro (75) y para usar el mencionado valor para mantener al portador de carga (10) en la posición predeterminada, en donde el sistema de control (78) está dispuesto para combinar la señal del acelerómetro (75) con la señal del giróscopo (74) , de tal manera que se calcula un segundo valor de desviación del portador de carga (10) respecto de la aceleración de la gravedad, en donde el sistema de control (78) está dispuesto además para utilizar el mencionado segundo valor de la desviación del portador de carga
(10) respecto de la aceleración de la gravedad para controlar el motor de ajuste (71) .
2. Aparato de acuerdo con la reivindicación 1, caracterizado porque el sistema de control (78) comprende además un amplificador (94) que está dispuesto para amplificar la señal del giróscopo (74) antes de que sea combinada con la señal del acelerómetro (75) .
3. Aparato de acuerdo con la reivindicación 2, caracterizado porque el mencionado amplificador (94) tiene una ganancia en un rango de 5-15, preferiblemente en un rango de 8-12, más preferiblemente en un rango de 9, 5 -10, 5.
4. Aparato de acuerdo con la reivindicación 2 o 3, caracterizado porque el sistema de control (78) comprende además un filtro (96) de paso bajo que está dispuesto para filtrar la señal combinada del giróscopo (74) y el acelerómetro (75) .
5. Aparato de acuerdo con la reivindicación 4, caracterizado porque el mencionado filtro (96) de paso bajo tiene una frecuencia de corte en un rango de 0, 01 -0, 03 HZ, preferiblemente en un rango de 0, 013 -0, 02 Hz, más preferiblemente en un rango de 0, 015 -0, 017 Hz.
6. Aparato de acuerdo con la reivindicación 4 o 5, caracterizado porque el sistema de control (78) comprende además un filtro (97) de paso alto que está dispuesto para filtrar la señal combinada del giróscopo (74) y el acelerómetro (75) .
7. Aparato de acuerdo con la reivindicación 6, caracterizado porque el mencionado filtro (97) de paso alto tiene una frecuencia de corte en un rango de 0, 01 -0, 03 Hz, preferiblemente en un rango de 0, 013 -0, 02 Hz, más preferiblemente en un rango de 0, 015 -0, 017 Hz.
8. Aparato de acuerdo con la reivindicación 6 o 7, caracterizado porque el sistema de control (78) comprende además un segundo filtro (98) de paso bajo que está dispuesto para filtrar la señal del acelerómetro (75) .
9. Aparato de acuerdo con la reivindicación 8, caracterizado porque el mencionado segundo filtro (98) de paso bajo tiene una frecuencia de corte en un rango de 0, 01 -0, 03 Hz, preferiblemente en un rango de 0, 013 -0, 02 Hz, más preferiblemente en un rango de 0, 015 -0, 017 Hz.
10. Aparato de acuerdo con la reivindicación 8 o 9, caracterizado porque el sistema de control (78) está dispuesto para combinar la señal combinada doblemente filtrada del giróscopo (74) y el acelerómetro (75) y la señal filtrada del acelerómetro (75) , en donde el sistema de control 78) está dispuesto además para sustraer la señal combinada de un valor predeterminado de desviación del portador de carga (10) respecto de la aceleración de la gravedad, y en donde el sistema de control (78) comprende además un controlador PI (84) que está dispuesto para determinar la rotación correccional necesaria con el fin de alcanzar el valor predeterminado de desviación del portador de carga
(10) respecto de la aceleración de la gravedad.
11 Aparato de acuerdo con cualquiera de las reivindicaciones precedentes 1-10, caracterizado porque los mencionados sensores (73, 74, 75) comprenden además un segundo giróscopo (73) montado en el bastidor.
12. Aparato de acuerdo con la reivindicación 11, caracterizado porque el sistema de control (78) está dispuesto para utilizar la señal del segundo giróscopo (73) para controlar el motor de ajuste (71) de manera que ocurra una rotación correccional.
Patentes similares o relacionadas:
Ascensor de escalera, del 8 de Abril de 2020, de thyssenkrupp Stairlifts B.V: Ascensor de escalera que comprende: - al menos un raíl que se extiende a lo largo de una pista - un bastidor , suspendido sobre al menos un raíl, y que […]
Método para soldar un riel para un salvaescaleras, un riel para un salvaescaleras y un salvaescaleras que comprende dicho riel, del 1 de Abril de 2020, de Handicare Stairlifts B.V: Un método para producir un riel para un salvaescaleras , en donde el método comprende: a) proporcionar un soporte curvo para el riel ; b) proporcionar […]
Plataforma elevadora, del 27 de Noviembre de 2019, de thyssenkrupp Stairlifts B.V: Una plataforma elevadora , en particular un salvaescaleras , que comprende un carril , una unidad de accionamiento que tiene una plataforma , en particular […]
Sistema de seguridad de salvaescaleras y procedimiento de control de la operación de un sistema de salvaescaleras, del 14 de Agosto de 2019, de ThyssenKrupp AG: Sistema de salvaescaleras que comprende un carro de salvaescaleras provisto de una silla , estando adaptado el carro de salvaescaleras para desplazarse […]
 Procedimiento de formación de un elemento de construcción tubular, del 26 de Junio de 2019, de PG Invention B.V: Un procedimiento de formación de un elemento de construcción tubular formado por segmentos que se extienden longitudinalmente , segmentos que se unen entre […]
Procedimiento de formación de un elemento de construcción tubular, del 26 de Junio de 2019, de PG Invention B.V: Un procedimiento de formación de un elemento de construcción tubular formado por segmentos que se extienden longitudinalmente , segmentos que se unen entre […]
Elevador de escaleras, del 25 de Abril de 2019, de ThyssenKrupp AG: Elevador de escaleras que comprende un carril para su montaje a lo largo de una escalera, una plataforma que está montada de modo que se […]
Procedimiento y sistema para diseñar un conjunto de carriles de un elevador de escalera, del 10 de Abril de 2019, de Handicare Stairlifts B.V: Procedimiento para diseñar un conjunto de carriles de un elevador de escalera para montarse en una estructura tridimensional , comprendiendo el procedimiento […]
Elemento motriz de salvaescaleras con pieza de montaje girable para asiento, del 6 de Febrero de 2019, de thyssenkrupp Stairlifts B.V: Elemento motriz de salvaescaleras, que comprende • un carril que se extiende a lo largo de una vía, • una primera parte del bastidor […]