Aparato para la corrección de la borrosidad, método de control del mismo y aparato para la captura de imágenes.
Aparato para la corrección de la borrosidad que comprende:
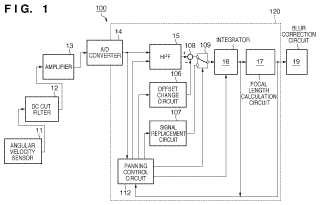
medios (11-15) de detección dispuestos para detectar un movimiento brusco del aparato para la corrección de la borrosidad y emitir una señal que representa el movimiento brusco detectado;
medios (17) de cálculo de los datos de corrección dispuestos para calcular, en base a la señal de salida de dichos medios (11-15) de detección, datos de corrección del movimiento brusco para utilizar en la corrección de la borrosidad de una imagen provocada por el movimiento brusco; y
medios (112) de control dispuestos para detectar una operación de barrido detectando que un valor absoluto de los datos de corrección del movimiento brusco ha superado un primer umbral predeterminado, caracterizado porque:
los medios (106) de generación dispuestos para generar un valor de desfase a eliminar de la señal de salida de dichos medios (11-15) de detección cuando dichos medios (112) de control detectan la operación de barrido; y los medios (108) de eliminación dispuestos para eliminar dicho valor de desfase de dicha señal de salida, en el que dichos medios de generación se disponen para generar el valor de desfase correspondiente a la señal de salida de dichos medios de detección, durante el tiempo en el que dichos medios de control detectan la operación de barrido.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10168108.
Solicitante: CANON KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 30-2, SHIMOMARUKO 3-CHOME OHTA-KU TOKYO 146-8501 JAPON.
Inventor/es: Miyasako,Kenichi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G02B27/64 FISICA. › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 27/00 Aparatos o sistemas ópticos no previstos en ninguno de los grupos G02B 1/00 - G02B 26/00, G02B 30/00. › Sistemas para obtener imágenes que utilizan elementos ópticos para la estabilización lateral y angular de la imagen (sistemas de enfoque G02B 7/04; regulación del sistema óptico relativo a la imagen dentro de los aparatos fotográficos, los proyectores o los reproductores G03B 5/00).
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
PDF original: ES-2382691_T3.pdf
Fragmento de la descripción:
Aparato para la corrección de la borrosidad, método de control del mismo y aparato para la captura de imágenes
ANTECEDENTES DE LA INVENCIÓN
Sector de la invención La presente invención se refiere a un aparato para la corrección de la borrosidad y a un método de control del mismo que corrige la borrosidad en una imagen capturada provocada por el movimiento (movimiento brusco) de un aparato para la captura de imágenes. La presente invención también se refiere a un aparato para la captura de imágenes que comprende el aparato para la corrección de la borrosidad.
Descripción de la técnica relacionada La degradación de la calidad de una imagen capturada es provocada principalmente por el movimiento del aparato para la captura de imágenes denominado movimiento brusco del dispositivo o movimiento brusco de la cámara durante la exposición, que es especialmente problemático debido a las recientes reducciones del tamaño de los aparatos para la captura de imágenes o al incremento del aumento de las lentes de zoom. En consecuencia, se ha propuesto un aparato para la corrección de la borrosidad para reducir la influencia (borrosidad) de los movimientos bruscos del dispositivo en una imagen capturada.
Por otra parte, existe un método de captura de imágenes tal como un disparo de seguimiento que captura una imagen mientras se desplaza intencionadamente el aparato para la captura de imágenes. No es preferible aplicar la corrección de la borrosidad sin realizar una distinción entre un movimiento brusco del dispositivo y dicho movimiento intencionado de un aparato para la captura de imágenes. Por tanto, es conocida la determinación de si el movimiento de un aparato para la captura de imágenes es un movimiento intencionado o un movimiento brusco del dispositivo y la corrección de la sensibilidad de la corrección de la borrosidad de acuerdo con el resultado de la determinación.
Por ejemplo, la patente japonesa número 3186219 da a conocer la supresión de la respuesta de la función de corrección de la borrosidad para las componentes de la frecuencia del barrido cuando se determina que el aparato para la captura de imágenes está realizando un barrido.
Por ejemplo, un aparato para la corrección de la borrosidad montado sobre un aparato para la captura de imágenes tiene una disposición tal como se muestra en la figura 19. En un aparato -10- para la corrección de la borrosidad, se fija un sensor -11- de la velocidad angular al cuerpo principal del aparato para la captura de imágenes (no mostrado) para detectar el movimiento brusco como una señal que representa una velocidad angular. Un filtro -12- de corte de CC elimina la componente de CC (corriente continua) de la señal de la velocidad angular emitida por el sensor -11de la velocidad angular y deja pasar únicamente la componente de corriente alterna CA, es decir, la componente de vibración. Un amplificador -13- amplifica la señal de la velocidad angular generada a través del filtro -12- de corte de CC y la emite. Un convertidor -14- A/D (analógico/digital) digitaliza la señal de la velocidad angular amplificada por el amplificador -13- y la emite.
Un filtro -15- HPF (filtro de paso alto) , un integrador -16-, un circuito -17- de cálculo de la distancia focal y un circuito -18- de control del barrido se implementan, por ejemplo, haciendo que un microordenador -20- ejecute un software almacenado en una memoria no volátil (no mostrado) .
El filtro -15- HPF elimina, de las componentes de frecuencia de la señal digital de la velocidad angular (datos de la velocidad angular) generada por el convertidor -14- A/D, las componentes de baja frecuencia iguales o inferiores que una frecuencia de corte preestablecida inferior y emite las componentes de alta frecuencia mayores que la frecuencia de corte inferior. El integrador -16- integra las componentes de alta frecuencia de los datos de la velocidad angular generados por el filtro -15- HPF y emite el resultado de la integración como datos del desplazamiento angular. El circuito -17- de cálculo de la distancia focal detecta la distancia focal de la lente de zoom dispuesta en el aparato para la captura de imágenes (no mostrado) . El circuito -17- de cálculo de la distancia focal, por ejemplo, obtiene la posición actual del zoom de la lente de zoom del aparato para la captura de imágenes a partir de un codificador de zoom, y calcula la distancia focal (ángulo de visión) de la lente de zoom en base a la posición del zoom, detectando de esta manera la distancia focal. En base a la distancia focal y a los datos del desplazamiento angular descritos anteriormente, el circuito -17- de cálculo de la distancia focal calcula entonces los datos de corrección del movimiento brusco para utilizarlos en la corrección de un movimiento brusco del eje óptico del sensor de imagen. Un circuito -19- de corrección de la borrosidad corrige el movimiento brusco del eje óptico del aparato para la captura de imágenes de acuerdo con los datos de corrección del movimiento brusco.
El circuito -19- de corrección de la borrosidad puede ser tanto un circuito de corrección óptica de la borrosidad que corrige la borrosidad accionando la lente de corrección en una dirección perpendicular al eje óptico y descentrando el eje óptico, o un circuito de corrección electrónica de la borrosidad que corrige la borrosidad desplazando una zona a leer por el sensor de imagen. De manera alternativa, puede ser un circuito de corrección de la borrosidad con desplazamiento de sensor que desplaza el sensor de imagen en un plano perpendicular al eje óptico.
En base a los datos de la velocidad angular generados por el convertidor -14- A/D y los datos del desplazamiento angular generados por el integrador -16-, el circuito -18- de control del barrido determina si el aparato para la captura de imágenes está realizando un barrido (determinación de barrido) . Más específicamente, por ejemplo, si los datos de la velocidad angular son iguales o mayores que un umbral predeterminado, o si los datos de la velocidad angular son menores que un umbral predeterminado pero los datos del desplazamiento angular (resultado de la integración) son iguales o mayores que un umbral predeterminado, se determina que el aparato para la captura de imágenes está realizando un barrido.
El circuito -18- de control del barrido realiza entonces un control del barrido de acuerdo con el resultado de la determinación del barrido. En el control del barrido, en primer lugar, la frecuencia de corte inferior del filtro -15- HPF se eleva gradualmente para reducir el dominio de la frecuencia del movimiento brusco en el que la corrección de la borrosidad funciona. Además, el valor de la constante de tiempo a utilizar para la operación de integración del integrador -16- se disminuye gradualmente. En consecuencia, la posición de la corrección de la borrosidad se desplaza gradualmente al centro del rango de movimiento de manera que el valor de los datos del desplazamiento angular generado por el integrador -16- se aproxima gradualmente al valor de referencia (un valor posible en un estado sin ningún movimiento brusco) .
Por otra parte, al determinar que el aparato para la captura de imágenes no se encuentra en un estado de barrido, el circuito -18- de control de barrido disminuye gradualmente la frecuencia de corte inferior del filtro -15- HPF y aumenta gradualmente el valor de la constante de tiempo a utilizar para la operación de integración del integrador -16-. En consecuencia, la frecuencia de corte inferior del filtro -15- HPF y el valor de la constante de tiempo a utilizar para la operación de integración del integrador -16- vuelven a sus estados iniciales de manera que se anula el control del barrido.
Por ejemplo, la patente japonesa número 3186219 da a conocer un método para controlar el filtro -15- HPF y el integrador -16- en el modo de barrido descrito anteriormente.
No obstante, la banda de frecuencias de la operación de barrido oscila aproximadamente desde la CC hasta 1 Hz, y la banda de frecuencias de un movimiento brusco de la cámara o un movimiento brusco del cuerpo oscila aproximadamente desde 1 Hz hasta 10 Hz. Es decir, las bandas de frecuencias están muy próximas. Por esta razón, la técnica convencional dada a conocer en la patente japonesa número 3186219 tiene el siguiente problema.
Al determinar el estado de barrido, la frecuencia de corte inferior del filtro -15- HPF y el valor de la constante de tiempo del integrador -16- se controlan para aumentar la cantidad de atenuación de señal de la componente de frecuencia del barrido. En... [Seguir leyendo]
Reivindicaciones:
1. Aparato para la corrección de la borrosidad que comprende:
medios (11-15) de detección dispuestos para detectar un movimiento brusco del aparato para la corrección de la borrosidad y emitir una señal que representa el movimiento brusco detectado;
medios (17) de cálculo de los datos de corrección dispuestos para calcular, en base a la señal de salida de dichos medios (11-15) de detección, datos de corrección del movimiento brusco para utilizar en la corrección de la borrosidad de una imagen provocada por el movimiento brusco; y medios (112) de control dispuestos para detectar una operación de barrido detectando que un valor absoluto de los datos de corrección del movimiento brusco ha superado un primer umbral predeterminado, caracterizado porque:
los medios (106) de generación dispuestos para generar un valor de desfase a eliminar de la señal de salida de dichos medios (11-15) de detección cuando dichos medios (112) de control detectan la operación de barrido; y los medios (108) de eliminación dispuestos para eliminar dicho valor de desfase de dicha señal de salida, en el que dichos medios de generación se disponen para generar el valor de desfase correspondiente a la señal de salida de dichos medios de detección, durante el tiempo en el que dichos medios de control detectan la operación de barrido.
2. Aparato, según la reivindicación 1, en el que dichos medios de generación se disponen para generar el valor de desfase que tiene un valor que aumenta el valor absoluto de los datos de corrección del movimiento brusco, durante un tiempo en el que dichos medios de control detectan la operación de barrido, y la señal de salida de dichos medios de detección aumenta.
3. Aparato, según la reivindicación 1, en el que dichos medios de generación se disponen para que el valor de desfase no cambie, durante un tiempo en el que dichos medios de control detectan la operación de barrido, y la señal de salida de dichos medios de detección disminuye.
4. Aparato, según cualquiera de las reivindicaciones 1 a 3, en el que:
dichos medios de control se disponen para detectar el final de la operación de barrido del aparato para la corrección de la borrosidad detectando que el valor absoluto de los datos de corrección del movimiento brusco ha caído por debajo de un segundo umbral menor que el primer umbral, y dichos medios de generación se disponen para fijar el valor de desfase a cero cuando dichos medios de control detectan el final de la operación de barrido.
5. Aparato, según cualquiera de las reivindicaciones 1 a 4, en el que:
dichos medios (11-15) de detección comprenden un filtro (15) paso alto, y dichos medios de eliminación se disponen para eliminar el valor de desfase de una salida de dicho filtro (15) paso alto.
6. Aparato, según cualquiera de las reivindicaciones 1 a 5, en el que los medios (17) de cálculo de los datos de corrección se encuentran en la forma de unos medios de cálculo de la distancia focal (17) dispuestos para detectar la distancia focal de una lente dispuesta en el aparato para la captura de imágenes,
en el que dichos medios de control se disponen para disminuir el nivel en el que el primer umbral se fija a medida que aumenta la distancia focal detectada.
7. Aparato, según cualquiera de las reivindicaciones 1 a 5, en el que los medios (17) de cálculo de los datos de corrección se encuentran en la forma de unos medios (17) de cálculo de la distancia focal dispuestos para detectar la distancia focal de una lente dispuesta en el aparato para la captura de imágenes,
en el que dichos medios de control se disponen para aumentar el nivel en el que se fija el segundo umbral a medida que aumenta la distancia focal detectada.
8. Aparato para la captura de imágenes, que comprende el aparato para la corrección de la borrosidad según cualquiera de las reivindicaciones 1 a 7.
9. Método de control del aparato para la corrección de la borrosidad que tiene unos medios de detección dispuestos para detectar un movimiento brusco del aparato para la corrección de la borrosidad y emitir una señal que representa el movimiento brusco detectado, comprendiendo el método:
una etapa de cálculo de los datos de corrección para calcular, en base a la señal de salida de dichos medios de detección, los datos de corrección del movimiento brusco para utilizar en la corrección de la borrosidad de una imagen provocada por el movimiento brusco; y una etapa de control para detectar una operación de barrido detectando que un valor absoluto de los datos de 5 corrección del movimiento brusco ha superado un primer umbral predeterminado,
caracterizado porque:
una etapa de generación para generar un valor de desfase a eliminar de la señal de salida de dichos medios de detección cuando se ha detectado la operación de barrido en dicha etapa de control; y una etapa de eliminación para eliminar el valor de desfase de la señal de salida de dichos medios de detección, en el que durante un tiempo en el que se ha detectado la operación de barrido en dicha etapa de control, dicha etapa de generación genera el valor de desfase correspondiente a la señal de salida de dichos medios de detección.
Patentes similares o relacionadas:
Retenedor para dispositivo de aumento electrónico, del 15 de Julio de 2020, de FREEDOM SCIENTIFIC INC.: Un dispositivo de aumento para su uso por usuarios ciegos o con baja visión, incluyendo el dispositivo de aumento una mesa que tiene un borde delantero, […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Dispositivo que comprende un dispositivo de imágenes multicanal y procedimiento para producirlo, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un dispositivo que comprende: una carcasa que tiene una primera área transparente (14a) y una segunda área transparente (14b); […]
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Enfoque para escena de fuente de luz puntual, del 15 de Abril de 2020, de Zhejiang Uniview Technologies Co., Ltd: Un procedimiento de enfoque, que comprende: establecer posiciones de una lente de enfoque secuencialmente; registrar información estadística […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimiento y aparato de grabación de imagen de vídeo en un terminal portátil que tiene doble cámara, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de grabación de vídeo por un terminal portátil de doble cámara , que comprende: emitir un primer flujo de vídeo capturado por una primera […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]