UN MECANISMO LIMITADOR DE UNA HERRAMIENTA.
Un mecanismo limitador de una herramienta que comprende un manipulador (101) y un mecanismo de centrado remoto (102) montado en el mismo,
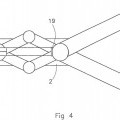
proporcionando el manipulador al menos un grado de libertad para colocar el mecanismo de centrado remoto, y proporcionando el mecanismo de centrado remoto grados de libertad adicionales para posicionar un soporte de herramienta, siendo dicho soporte adecuado para sostener una herramienta (103, 104) que va a ser limitada en operación con respecto a un punto central remoto (410), siendo la orientación del soporte de herramienta ajustable mientras mantiene la posición del punto central remoto fijo con respecto al manipulador; en el que el mecanismo de centrado remoto (102) comprende una primera unión rígida (406) acoplada al manipulador (101) por una primera junta giratoria (401) para girar alrededor de un primer eje (411), y una segunda unión rígida (407) unida a la primera unión rígida mediante una segunda junta giratoria (402) para girar alrededor de un segundo eje (408), estando el soporte de la herramienta montado en o formando parte de la segunda unión (407), con el primer (408) y el segundo (409) ejes cruzándose en el centro remoto (410); estando el mecanismo caracterizado porque la primera junta giratoria (401) está en un primer extremo de la primera unión rígida (406), y porque el soporte de herramienta está en el extremo distal de la segunda unión rígida (407):
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2006/003107.
Solicitante: Stanmore Implants Worldwide Limited.
Nacionalidad solicitante: Reino Unido.
Dirección: Unit 210 Centennial Park Centennial Avenue Elstree WD6 3SJ REINO UNIDO.
Inventor/es: RODRIGUEZ Y BAENA,Ferdinando,Maria.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Agosto de 2006.
Clasificación Internacional de Patentes:
- A61B19/00M
Clasificación PCT:
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2362304_T3.pdf
Fragmento de la descripción:
La invención presente trata de un mecanismo que limita la situación espacial del punto de trabajo o del punto focal de una herramienta; y en particular, aunque no exclusivamente, proporciona un mecanismo limitador para ser utilizado en sistemas médicos robotizados multipropósito, como por ejemplo la escultura de huesos, que se realiza utilizando una fresa esférica. Las aplicaciones típicas pueden incluir la cirugía mínimamente invasiva, como por ejemplo la artoplastia de rodilla unicompartimental, inserción de tornillos en el pedículo y la artoplastia de cadera.
Son conocidos en la técnica dispositivos anteriores para manipular herramientas quirúrgicas y mecanismos de sujeción. Tales dispositivos implican con frecuencia brazos motorizados muy grandes y complicados con sensores de seguimiento de la posición con seis grados de libertad. Tales dispositivos son normalmente tanto difíciles de manejar, lo que impide los movimientos intrincados y sutiles de las herramientas requeridos normalmente durante la cirugía delicada, como costosos. Para muchas aplicaciones, por ejemplo para la escultura de huesos utilizando una fresa esférica, el control de únicamente tres grados de libertad es suficiente para guiar completamente una herramienta de escultura. La posición de la parte final funcional de la herramienta, por ejemplo la fresa de corte esférica en sí misma, necesita ser monitorizada, seguida y limitada, pero la orientación rotacional, por ejemplo cabeceo y guiñada, del extremo funcional de la herramienta y de la herramienta en sí misma no es importante.
Las patentes de los Estados Unidos US-B1-6493608 y US-A-4669483 describen un mecanismo limitador de la herramienta que incorpora las características establecidas en la parte de precaracterísticas de la reivindicación 1. Otros mecanismos limitadores de la herramienta se describen en los documentos US-B1-6547782, US-A-4669483 y US-B1-6493608.
De acuerdo con la invención presente un mecanismo limitador de la herramienta se caracteriza por aquellas propiedades establecidas en la parte de caracterización de la reivindicación 1.
La invención presente proporciona un mecanismo limitador de la herramienta que comprende un manipulador y un mecanismo de centrado remoto montado en el mismo, proporcionando el manipulador al menos un grado de libertad para posicionar el mecanismo de centrado remoto, y proporcionando el mecanismo de centrado remoto al menos un grado de libertad adicional para posicionar un soporte de herramienta, siendo dicho soporte de herramienta adecuado para sujetar una herramienta que va a ser sujetada en operación con respecto a un punto de centrado remoto, siendo ajustable la orientación del soporte de la herramienta al mismo tiempo que mantiene la posición del punto de centrado remoto fijo con respecto al manipulador. Preferiblemente, el manipulador puede proporcionar al menos tres grados de libertad y el mecanismo de centrado remoto dos adicionales.
Las realizaciones de acuerdo con la invención presente permiten limitar espacialmente la punta de trabajo de una herramienta, por ejemplo de una fresa esférica, dentro de una zona segura o entorno de trabajo mientras que la orientación de la herramienta óptima se deja para el control del usuario, por ejemplo un cirujano. Esto permite que la herramienta sea orientada en sentido rotativo con libertad para evitar una obstrucción y para mayor facilidad e manipulación, al mismo tiempo que el extremo funcional de la herramienta se mantiene en una zona de trabajo segura, área o sobre. Las realizaciones de acuerdo con la invención presente pueden ser utilizadas en cualquier aplicación que requiera que la punta de trabajo de una herramienta sea constreñida a una región pero donde la orientación de la herramienta no se requiere necesariamente que esté limitada. En algunas realizaciones, la punta de trabajo puede estar situada en un extremo funcional de la herramienta (por ejemplo una cuchilla), mientras en otros el punto de trabajo u objetivo puede estar situado a una distancia de la herramienta (por ejemplo una pistola láser o de rayos X).
Preferiblemente el manipulador 101 es retráctil, equilibrado y motorizado de manera que los movimientos de enlace puedan ser limitados activamente a una región predefinida dentro de la cual el usuario es libre de desplazar el instrumento con mínimo esfuerzo y fricción. Las uniones pueden ser también codificadas en posición y pueden tener frenos. Preferiblemente, el manipulador comprende tres grados de libertad con tres juntas de revolución, y el mecanismo de centrado remoto comprende dos grados de libertad con dos juntas de revolución que tienen un rango de movimiento de 360º.
El sistema puede consistir en un manipulador serie de giro – giro – giro (RRR) de tres grados de libertad, con una unión en la cintura, una unión del hombro, y una unión del codo, y dos uniones adicionales no controladas / seguidas en una configuración de movimiento central remoto con la fresa esférica colocada en el punto focal. Esto permite que el usuario oriente la herramienta para una entrada óptima sin afectar la posición de la fresa esférica, que está limitada por las primeras tres uniones (motorizadas) del sistema.
Las realizaciones preferidas pueden incluir también:
>Codificadores rotatorios montados sobre los mecanismos de unión del centro remoto para guiar al usuario mientras orienta la herramienta.
>Motores montados sobre los mecanismos de unión del centro remoto para limitar la orientación de la herramienta para una asistencia robotizada en tres dimensiones completas. >Una fijación modular para ajustar diferentes mecanismos de centro remoto con diferentes envolturas de trabajo para diferentes aplicaciones. >Una fijación modular para reorientar el mecanismo de centro remoto para ajustarlo a diferentes aplicaciones.
Otras aplicaciones posibles incluyen los trabajos de escultura y el entrenamiento de movimientos de mano complejos.
Se detallan a continuación más ventajas de las realizaciones de acuerdo con la invención presente.
La invención presente puede ser llevada a cabo en la práctica de varias maneras, y se describirán a continuación diversas realizaciones específicas, por medio de ejemplos no limitativos, y mediante referencia a los dibujos que se acompañan, en los que:
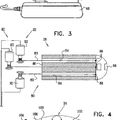
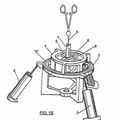
La Figura 1 es un diagrama esquemático de una primera realización de un mecanismo limitador de acuerdo con la invención presente; La Figura 2 es un diagrama esquemático de un manipulador alternativo adecuado para ser utilizado con realizaciones de un mecanismo limitador de acuerdo con la invención presente; La Figura 3 es un diagrama esquemático de un manipulador alternativo adicional adecuado para ser utilizado con realizaciones de un mecanismo limitador de acuerdo con la invención presente; Las Figuras 4A, 4B y 4C muestran vistas en perspectiva de un mecanismo de centrado remoto adecuado para ser utilizado con realizaciones de un mecanismo limitador de acuerdo con la invención presente; y La Figura 5 muestra una realización de un mecanismo limitador de acuerdo con la invención presente.
Como se muestra esquemáticamente en la Figura 1, un mecanismo limitador 100 de acuerdo con una primera realización de la invención presente incluye un manipulador 101, un mecanismo de centrado remoto 102 y una herramienta 103.
El manipulador 101 está unido a una base que proporciona un bastidor local de referencia y una base segura. El manipulador 101 incluye juntas giratorias 104, 105 y 106 conectadas en serie. Asociada a cada unión hay una unión rígida 106, 107 y 108 respectivamente, cuyos movimientos están limitados a los movimientos permitidos por las juntas. Para cada junta, 104, 105, 106 solo se permite la rotación alrededor del eje de rotación central de la junta 110, 112, 113, como se muestra por las flechas 109, 111, 114 respectivamente.
Una realización alternativa, mostrada en la Figura 2, incluye juntas prismáticas 201, 202, 203 en lugar de las juntas de giro de la Figura 1. Cada junta prismática, por ejemplo la 202, permite únicamente movimientos de traslación a lo largo del eje de la junta 204, como se muestra por la flecha 205.
Las juntas pueden ser en su totalidad juntas de giro como en la Figura 1, o en su totalidad juntas prismáticas como en la Figura 2, o una mezcla de juntas de giro, prismáticas o de otros tipos como de bola o de rótula, como se muestra en la Figura 3. Además, las uniones rígidas no tienen porqué ser rectas, sino que pueden tener... [Seguir leyendo]
Reivindicaciones:
1. Un mecanismo limitador de una herramienta que comprende un manipulador (101) y un mecanismo de centrado remoto (102) montado en el mismo, proporcionando el manipulador al menos un grado de libertad para colocar el mecanismo de centrado remoto, y proporcionando el mecanismo de centrado remoto grados de libertad adicionales para posicionar un soporte de herramienta, siendo dicho soporte adecuado para sostener una herramienta (103, 104) que va a ser limitada en operación con respecto a un punto central remoto (410), siendo la orientación del soporte de herramienta ajustable mientras mantiene la posición del punto central remoto fijo con respecto al manipulador; en el que el mecanismo de centrado remoto (102) comprende una primera unión rígida (406) acoplada al manipulador (101) por una primera junta giratoria (401) para girar alrededor de un primer eje (411), y una segunda unión rígida (407) unida a la primera unión rígida mediante una segunda junta giratoria (402) para girar alrededor de un segundo eje (408), estando el soporte de la herramienta montado en o formando parte de la segunda unión (407), con el primer (408) y el segundo (409) ejes cruzándose en el centro remoto (410); estando el mecanismo caracterizado porque la primera junta giratoria (401) está en un primer extremo de la primera unión rígida (406), y porque el soporte de herramienta está en el extremo distal de la segunda unión rígida (407):
2. Un mecanismo limitador de una herramienta como el reivindicado en las reivindicación 1 en el que al menos una unta (401, 402) del mecanismo de centrado remoto es motorizada.
3. Un mecanismo limitador de una herramienta como el reivindicado en la reivindicación 1 ó en la reivindicación 2 en el que al menos una junta (401, 402) del mecanismo de centrado remoto tiene seguimiento de la posición.
4. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones precedentes en el que el soporte de la herramienta proporciona un montaje giratorio para una herramienta (403) cuando está sujetada por el soporte de herramienta.
5. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones precedentes que incluye una herramienta (403) sujeta al soporte de herramienta.
6. Un mecanismo limitador de una herramienta como el reivindicado en la reivindicación 5 en el que la herramienta
(403) tiene un extremo funcional (404) que es sujetado por el mecanismo de centrado remoto (102) en el centro remoto (410).
7. Un mecanismo limitador de una herramienta como el reivindicado en la reivindicación 5 en el que la herramienta
(403) tiene un extremo funcional (404) que se mantiene por el mecanismo de centrado remoto (102) separado del centro remoto (410), estando por tanto el extremo funcional mantenido en una superficie definida cuando la herramienta se coloca mediante el mecanismo de centrado remoto.
8. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones 5 a 7 en el que la herramienta (403) puede ser agarrada manualmente, siendo su orientación ajustable manualmente por el usuario.
9. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones 5 a 8 en el que la herramienta (403) es una fresa.
10. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones 5 a 8 en el que la herramienta es un láser o un dispositivo de irradiación.
11. Un mecanismo limitador de una herramienta como el reivindicado en cualquiera de las reivindicaciones 5 a 8 en el que la herramienta es un instrumento quirúrgico.
12. Un mecanismo limitador de una herramienta como el reivindicado en la reivindicación 5 en el que la herramienta
(403) está rodeada por un manguito giratorio que se puede sujetar manualmente.
Patentes similares o relacionadas:
SISTEMA QUIRÚRGICO ULTRASÓNICO, del 24 de Junio de 2011, de ETHICON ENDO-SURGERY, INC.: - Un sistema quirúrgico ultrasónico que comprende: una unidad ultrasónica que incluye un instrumento conectado operativamente a un generador […]
PLATAFORMA ROBOTIZADA CON MÚLTIPLES APLICACIONES PARA NEUROCIRUGÍA Y PROCEDIMIENTO DE REAJUSTE, del 21 de Junio de 2011, de MEDTECH S.A: Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende: - una consola de planificación que integra […]
 INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]