RECOGEDOR AUTOMATICO DE PELOTAS.
1. Recogedor automático de pelotas, que estando previsto para su utilización en canchas de tenis,
pádel y similares, con el fin de recoger de forma automática las pelotas distribuidas caprichosamente durante los entrenamientos y práctica de dichos deportes, se caracteriza porque comprende un robot (1) mediante el que se lleva a cabo la recogida directa de las pelotas, y una columna con una cesta de almacenamiento de bolas, bajo cuya columna y cesta es susceptible de situarse convenientemente el robot para la descarga de las pelotas de éste sobre la cesta; con la particularidad de que dicho robot incluye una entrada de pelotas con dos rodillos, unas hélices para el trasiego de las pelotas y un depósito de almacenamiento de las propias pelotas, siendo dicho robot autónomo en su desplazamiento y recogida de las pelotas, mientras que la columna bajo la cual es susceptible de situarse el robot con su depósito lleno de pelotas, cuenta con hélices cuyo giro produce el trasiego de las pelotas desde el robot (1) hasta un tubo de salida de dicha columna, enfrentado a la propia embocadura de la cesta de almacenamiento de pelotas.2. Recogedor automático de pelotas, según reivindicación 1, caracterizado porque el robot, además de las correspondientes ruedas para su desplazamiento a lo largo de la cancha, incluye una batería para alimentación autónoma del mismo, un motor de accionamiento de las hélices, así como una CPU y célula de detección de posición, complementándose con un sensor detector de objetos y una cámara de video.3. Recogedor automático de pelotas, según reivindicaciones anteriores, caracterizado porque la columna bajo la cual se sitúa el robot, cuenta con una boca inferior de entrada de pelotas, y en el interior de la propia columna una serie de hélices para el trasiego de las pelotas desde el robot hasta el tubo de salida, con la particularidad de que esta columna junto con la cesta es susceptible de ir montada sobre un bastidor con ruedas para su desplazamiento y posicionado en cualquier lugar
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201030672.
Solicitante: FERREIRO MARTIN, LUIS ALBERTO.
Nacionalidad solicitante: España.
Provincia: MALAGA.
Inventor/es: FERREIRO MARTIN,LUIS ALBERTO.
Fecha de Solicitud: 28 de Junio de 2010.
Fecha de Publicación: .
Fecha de Concesión: 2 de Febrero de 2011.
Clasificación PCT:
- A63B47/02 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 47/00 Dispositivos para la manipulación o el tratamiento de las pelotas. › para su recogida.
Fragmento de la descripción:
Recogedor automático de pelotas.
Objeto de la invención
La presente invención se refiere a un recogedor automático de pelotas, previsto concretamente para la recogida de pelotas distribuidas aleatoriamente por canchas de tenis, pádel y similares.
El objeto de la invención es conseguir un ahorro de tiempo y de esfuerzo en la operación de recogida de pelotas, permitiendo un aprovechamiento total de las clases y entrenamientos de tenis y pádel.
Antecedentes de la invención
Como es sabido, en la práctica del tenis y del pádel, el monitor va lanzando continuamente pelotas a los alumnos, para que éstos las devuelvan o las golpeen de acuerdo con las pautas y órdenes que les dé el monitor, de manera que el lanzamiento de bolas a los alumnos es continuo, y éstos devuelven o no las bolas, cayendo en distintos lugares, que luego han de ser recogidas, puesto que el monitor las toma desde un cesto, y cuando se agotan lógicamente es necesario recoger las pelotas que están distribuidas por toda la cancha, recogida que conlleva no solamente un esfuerzo, puesto que es necesario agacharse cada vez que se recoge una bola, sino una pérdida de tiempo muy considerable, lo que deriva en que el tiempo real práctico de la clase se ve reducido en el periodo de tiempo que se tarda en recoger las bolas, cada vez que es necesario realizar esa operación.
Descripción de la invención
El recogedor de pelotas que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, en base a una solución sencilla pero de gran eficacia.
Mas concretamente, el recogedor automático de pelotas de la invención comprende dos partes, una de ellas constitutiva de un robot autónomo que con un depósito formando parte del mismo, está convenientemente programado para que recorra la cancha y vaya recogiendo todas las bolas que encuentre, mientras que la segunda parte la constituye una columna y la propia cesta de las pelotas, en donde el robot una vez lleno su depósito se dirige concretamente a esa zona de la columna y cesta, situándose convenientemente bajo esa columna y cesta, posicionándose adecuadamente mediante una célula de posición, para que mediante el accionamiento de unos medios apropiados, las bolas sean transvasadas desde el depósito del robot hasta la cesta de almacenamiento de las mismas, estando los medios de trasvasado constituidos por hélices que en su giro arrastran la bola en sentido ascendente desde el depósito del robot hasta la salida de la columna en la que están situadas esas hélices, cayendo directamente a la cesta de almacenamiento de las pelotas o bolas, de manera que el accionamiento del robot se lleva a cabo antes de que se agoten las pelotas del cesto, en orden a que vuelva a tiempo antes de que se agoten todas.
El robot, incluirá una batería para funcionamiento autónomo de aquel, batería que puede ser recargable mediante red, o a través de paneles fotovoltaicos incorporando en su parte inferior una boca de entrada con una pareja de rodillos dentados para el arrastre de las bolas hacia el interior, donde existen unas hélices que cuando el depósito que forma parte del robot está lleno, esas hélices, previa situación del robot bajo la columna y cesta de almacenamiento de pelotas o bolas, realizan el giro y correspondiente trasiego de las pelotas hasta la comentada cesta de almacenamiento.
Bajo esta cesta o bien bajo la propia columna con las hélices de trasiego de las pelotas, se ha previsto una célula de detección de posición del robot, incluyendo éste para su funcionamiento una CPU con software de reconocimiento de objetos, un panel del circuito, un sensor detector de objetos, una cámara de video y el correspondiente motor de accionamiento para giro de los rodillos dentados y por supuesto de las hélices de trasiego de las pelotas.
La capacidad del robot y de la cesta estarán dimensionados de manera que siempre queden pelotas en el cesto.
Mediante el dispositivo recogepelotas automático de la invención, se consigue un ahorro de tiempo y esfuerzo, proporcionando un mejor aprovechamiento de las clases y entrenamientos de tenis y pádel, ya que el dispositivo o recogedor va recogiendo las pelotas y rellenando la cesta, de manera que las clases tendrán la duración que determine el instructor o monitor, sin tener que detenerse por haber agotado la cantidad de pelotas que caben en la cesta.
Igualmente el recogedor automático de pelotas es práctico, puesto que no se gasta tiempo en recoger las pelotas, pudiéndose acortar la duración de las clases, pero manteniendo el tiempo de práctica de las mismas, por lo que supone el poder ofrecer a lo largo del día mayor número de horas de clase, sin que el alumno pierda tiempo de prácticas, lo que redunda en un ahorro para el alumno y un ingreso mayor para el club o monitores que utilicen el recogedor automático descrito.
Descripción de los dibujos
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
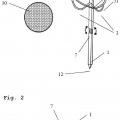
La figura 1.- Muestra una representación esquemática según alzado lateral del conjunto de recogedor automático de pelotas realizado de acuerdo con el objeto de la invención, en su posición de estar realizando el trasiego de las pelotas desde el depósito del robot hasta la cesta de almacenamiento de dichas pelotas.
La figura 2.- Muestra una vista en alzado lateral e independizado el robot que forma parte del recogedor automático de pelotas objeto de la invención.
La figura 3.- Muestra una vista en planta del robot representado en la figura anterior.
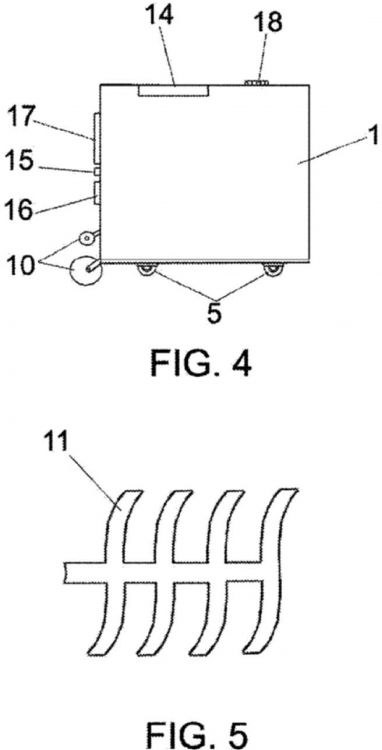
La figura 4.- Muestra una vista en alzado lateral y por la parte externa del mismo robot de las figuras anteriores, donde se dejan ver determinados componentes de mismo.
La figura 5.- Muestra, finalmente, una vista en detalle de la forma de la hélice para el trasiego de las pelotas desde el depósito del robot hasta la cesta de almacenamiento de las mismas.
Realización preferente de la invención
Como se puede ver en las figuras referidas, el recogedor automático de pelotas objeto de la invención comprende dos partes independientes pero asociables funcionalmente entre si, una correspondiente a un robot (1) y otra correspondiente a una columna (2) a la que está vinculada una cesta (3) de almacenamiento de pelotas (4), con la particularidad de que dicho robot (1) con el correspondiente software, será el encargado de recorrer la cancha donde se han distribuido en el desarrollo del juego las pelotas, para recogida de las mismas, para lo cual se ha previsto que dicho robot (1) cuente con ruedas (5) para el deslizamiento por la superficie de la cancha de recogida de pelotas, incluyendo una batería (6) que puede ser recargable mediante paneles fotovoltaicos o bien a través de red directamente, y que constituye un medio para que el robot (1) sea autónomo en su funcionamiento, comprendiendo éste un depósito (7) de almacenamiento de las bolas (4), y una zona anterior (8) con una entrada (9) en la que se han previsto una pareja de rodillos (10) que son dentados y de giro inverso, asociados a los correspondientes medios de accionamiento, no representados en las figuras, para la recogida de las pelotas (4) distribuidas caprichosamente sobre el suelo, incorporando en la zona (8) unas hélices (11) de elevación de las bolas (4) desde el depósito (7) hasta la zona de salida superior (12) de dicho robot (1) asistidas por el correspondiente motor, incluyendo un segundo motor (13) de desplazamiento del dispositivo, una CPU (14) para mediante el correspondiente software llevar a cabo un reconocimiento de objetos, interviniendo en este reconocimiento un sensor frontal (15) y una cámara de video (16), complementando frontalmente con un panel (17) del propio circuito.
Por otro lado, dicho robot (1) incluye en su parte superior una célula (18) de detección de posición del mismo, que es complementaria de otra (18') prevista bajo la cesta (3) de almacenamiento de las bolas o pelotas (4).
De esta manera, el funcionamiento del recogedor automático de pelotas es como sigue:
Una vez agotadas todas las pelotas de la cesta (3), se pone en funcionamiento el robot (1), recorriendo la cancha por la que están...
Reivindicaciones:
1. Recogedor automático de pelotas, que estando previsto para su utilización en canchas de tenis, pádel y similares, con el fin de recoger de forma automática las pelotas distribuidas caprichosamente durante los entrenamientos y práctica de dichos deportes, se caracteriza porque comprende un robot (1) mediante el que se lleva a cabo la recogida directa de las pelotas, y una columna con una cesta de almacenamiento de bolas, bajo cuya columna y cesta es susceptible de situarse convenientemente el robot para la descarga de las pelotas de éste sobre la cesta; con la particularidad de que dicho robot incluye una entrada de pelotas con dos rodillos, unas hélices para el trasiego de las pelotas y un depósito de almacenamiento de las propias pelotas, siendo dicho robot autónomo en su desplazamiento y recogida de las pelotas, mientras que la columna bajo la cual es susceptible de situarse el robot con su depósito lleno de pelotas, cuenta con hélices cuyo giro produce el trasiego de las pelotas desde el robot (1) hasta un tubo de salida de dicha columna, enfrentado a la propia embocadura de la cesta de almacenamiento de pelotas.
2. Recogedor automático de pelotas, según reivindicación 1, caracterizado porque el robot, además de las correspondientes ruedas para su desplazamiento a lo largo de la cancha, incluye una batería para alimentación autónoma del mismo, un motor de accionamiento de las hélices, así como una CPU y célula de detección de posición, complementándose con un sensor detector de objetos y una cámara de video.
3. Recogedor automático de pelotas, según reivindicaciones anteriores, caracterizado porque la columna bajo la cual se sitúa el robot, cuenta con una boca inferior de entrada de pelotas, y en el interior de la propia columna una serie de hélices para el trasiego de las pelotas desde el robot hasta el tubo de salida, con la particularidad de que esta columna junto con la cesta es susceptible de ir montada sobre un bastidor con ruedas para su desplazamiento y posicionado en cualquier lugar.
Patentes similares o relacionadas:
Dispositivo recolector de pelotas de tenis, del 27 de Enero de 2020, de CARRETERO NECHES, Luis: Dispositivo para la recolección pasiva de pelotas de tenis, ubicado en las esquinas de una pista de tenis, que comprende: uno o más depósitos […]
Aparato de entrenamiento de juego con balón, del 6 de Noviembre de 2019, de Cho, Byoung Koo: Un sistema de entrenamiento relacionado con un juego con balón que comprende: un terreno de juego definido por una línea media, dos líneas de fondo opuestas y dos líneas […]
Dispositivo de recogida y procedimiento asociado, del 10 de Abril de 2019, de CIFARELLI S.P.A.: Un dispositivo de recogida de objetos de una superficie del suelo que comprende: - un rodillo capaz de rodar sobre dicha superficie del suelo y que comprende […]
Soporte de almacenamiento de balones y pelotas, del 19 de Noviembre de 2018, de ALCARAZ MANCHON, Maria Dolores: 1. Soporte de almacenamiento de balones y pelotas , caracterizado porque comprende una estructura hueca con un eje longitudinal vertical que presenta […]
RECOGEDOR DE PELOTAS, del 29 de Septiembre de 2017, de PALMA RUIZ, Miguel Angel: 1. Recogedor de pelotas, caracterizado por el hecho de que comprende un cuerpo de disposición preponderantemente longitudinal y con un eje de simetría […]
EQUIPAMIENTO MULTIFUNCIÓN PARA ENTRENAMIENTO DE FÚTBOL, del 1 de Septiembre de 2017, de UNIVERSIDAD DE EXTREMADURA: Equipamiento multifunción para entrenamiento de fútbol, que comprende un cuerpo hueco de naturaleza rígida, con forma de prisma rectangular que presenta una cara delantera […]
 SOPORTE PARA BALONES, del 11 de Agosto de 2015, de Asociación Deportiva Arousa Fútbol 7: 1. Soporte para balones para almacenado y exposición de al menos un balón a pie de campo , pista o cancha de deporte caracterizado por comprender:
- […]
SOPORTE PARA BALONES, del 11 de Agosto de 2015, de Asociación Deportiva Arousa Fútbol 7: 1. Soporte para balones para almacenado y exposición de al menos un balón a pie de campo , pista o cancha de deporte caracterizado por comprender:
- […]
Tubo recogepelotas con elementos de agarre y sujeción para pelotas de tenis y paddle, del 27 de Octubre de 2014, de MATEO SAPERA, Antonio: 1. Tubo recogepelotas con elementos de agarre y sujeción para pelotas de tenis y pádel consiste en un tubo cuyo material es de Policloruro de Vinilo (PVC) que se caracteriza […]