PROCEDIMIENTO Y DISPOSITIVOS PARA MEDIR UNA TORSIÓN DE UNA PARTE DEL CUERPO.
Procedimiento para medir la torsión de un cuerpo (K) con ayuda de sensores de flexión (B1,
B2), estando dispuestos los sensores de flexión sobre una superficie del cuerpo (K), con las siguientes etapas: medición de la flexión que se presenta en cada caso debido a la torsión en los sensores de flexión (B1, B2) mediante una primera señal de flexión (T1) del primer sensor de flexión (B1) y mediante una segunda señal de flexión (T2) del segundo sensor de flexión (B2), provocando la flexión del primer y segundo sensor de flexión (B1, B2) en la misma dirección espacial un aumento de la primera señal de flexión (T1) y una reducción de la segunda señal de flexión (T2); averiguación de una señal de flexión (CT) característica de la torsión, sumando la primera señal de flexión (T1) y la segunda señal de flexión (T2)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/009196.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: GOLDBECK,Dirk,David , HAPPEL,Tobias , L'HENORET,Benjamin.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Octubre de 2007.
Clasificación Internacional de Patentes:
- A61B5/11 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
Clasificación PCT:
- A61B5/11 A61B 5/00 […] › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
- G01L1/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 1/00 Medida de fuerzas o tensiones, en general (medida de la fuerza producida por un choque G01L 5/00). › midiendo las variaciones de las propiedades ópticas del material cuando está sometido a una sujeción, p. ej. por el análisis de la incitación por fotoelasticidad.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
La presente invención se ocupa de un procedimiento, dispositivos y una aplicación del correspondiente dispositivo para medir una torsión de un cuerpo con ayuda de sensores de flexión.
Por una patente estadounidense [1] se sabe que puede utilizarse un sensor de flexión de fibra óptica para medir una flexión de un dedo. Además se indican en otra patente estadounidense [2], además de diversos sensores de flexión de fibra óptica, también un sensor de fibra óptica según las figuras 18-22, 5 con el que puede medirse una torsión. El sensor correspondiente está configurado para medir la torsión, tal que puede medirse una variación de la transmisión cuando hay una torsión. No obstante el sensor indicado en [2] tiene el inconveniente de que cuando se produce una flexión, es decir, un doblado, se indica una torsión. Además, cuando hay simultáneamente flexión y torsión, se mide incorrectamente la torsión. Con ayuda de las figuras 1A-C se describirá más en detalle este inconveniente. 10
En la figura 1A puede observarse una vista oblicua de un lazo de un sensor de flexión de fibra óptica, en el que la luz LI que penetra se acopla a la fibra y tras pasar por el lazo, la luz saliente LO sale de la fibra. La luz saliente LO es procesada por ejemplo mediante un fotodiodo o sensor sensible a la luz. La relación entre la luz que sale y la que entra LO/LI indica una atenuación a través de todo el lazo de fibras. En la fibra se encuentran dos zonas E1, E2 con las correspondientes muescas, modificándose en 15 función del radio del doblado en la zona de la correspondiente muesca la correspondiente transmisión de la luz que penetra. Una de las zonas está situada sobre la cara superior y la otra zona sobre la cara inferior de la fibra. En la sección A'---A puede observarse la posición de las zonas E1, E2. Cuando se acopla L = 100 % de luz en un punto (1), entonces se atenúa por ejemplo un 80% de la misma a través de la zona E1, es decir, en el punto (2) la potencia de la luz es un 80% de LI. A través de la zona E2 se 20 atenúa también un 80% de la potencia de la luz que entra en esta zona, con lo que en el punto (3) rige para la luz saliente:
LO = 80% * 80% * LI = 0,64 * LI
La figura 1A corresponde a la situación de las figuras 18 – 22 del documento [2]. En la figura 1A se encuentra el sensor de torsión en su posición básica. 25
Cuando se produce torsión, se tuercen las zonas E1, E2 respecto a los lugares en los que se acopla o desacopla la luz. Esto puede observarse en la sección B'---B. Aquí crece o decrece en ambas zonas E1, E2 la atenuación o bien la transmisión de la luz en la misma medida, en función del sentido de la torsión. Si se acopla en el punto (4) LI = 100% de luz, entonces en el punto (5) es aún un 90% y en el punto (6) 90% * 90%, con lo que resulta para la luz saliente: 30
LO = 90% * 90% * LI = 0,81 * LI
Si la torsión es en un sentido contrario al de este ejemplo, esto significa que la atenuación crece en las zonas E1, E2 respecto a en la posición básica, con lo que resulta para la luz saliente LO:
LO = 60% * 60% * LI = 0,36 * LI
Puesto que la fibra es elástica, puede suponerse que los radios de flexión que resultan en una 35 torsión son casi idénticos en las zonas E1, E2, con lo que también la atenuación o transmisión de la luz es casi idéntica.
Finalmente se considera en la figura 1C el caso de que el lazo no está sometido a torsión, sino a una flexión, es decir, doblado. En la figura 1C está doblado el lazo hacia abajo. Esto se refleja también en la correspondiente sección C'---C. Entonces resulta la atenuación en la zona E1 mayor y en la zona E2 40 menor que en la posición básica según la figura 1A. Si la luz que entra en el punto (7) LI = 100% se atenúa a través de la zona E1 en un 45%, es decir, en el punto (8) la potencia de la luz sólo es del 55%, entonces la potencia de la luz en el punto (9) sólo puede ser del 55% o menos, ya que la zona E2 realiza también una atenuación de la luz, es decir, no puede realizar compensación alguna de la luz atenuada a través de la zona E1. En este ejemplo es LO = 0,45 * LI, con lo que se detecta una torsión, ya que LO/LI 45 es inferior a en la posición básica, es decir, 64%.
Con ello se observa que el sensor de torsión propuesto en [2], cuando hay una flexión del sensor, mide también torsión, aún cuando no exista torsión alguna. El mismo inconveniente resulta además cuando se presentan a la vez torsión y flexión, es decir, doblado, detectándose incorrectamente en este caso la torsión, debido a la influencia de la flexión sobre el resultado de la medición. 50
En un documento WO 00/35345 se presenta un método y un dispositivo para vigilar vicios de postura de la columna vertebral.
Con ello se formula la tarea a resolver como indicación de un procedimiento y un dispositivo que detectan fiablemente una torsión con ayuda de sensores de flexión incluso cuando exista flexión.
Esta tarea se resuelve mediante las reivindicaciones independientes. Perfeccionamientos de la invención pueden tomarse de las reivindicaciones dependientes.
La invención se refiere a un procedimiento para medir la torsión de un cuerpo con ayuda de 5 sensores de flexión, estando alojados los sensores de flexión sobre una superficie del cuerpo, con las siguientes etapas:
Medición de la flexión correspondiente que se presenta debido a la torsión de los sensores de flexión mediante una primera señal de flexión del primer sensor de flexión y una segunda señal de flexión del segundo sensor de flexión; 10
Determinación de una señal de flexión característica de la torsión sustrayendo la primera señal de flexión de la segunda señal de flexión.
En función del sentido de la torsión, es diferente el doblado de los sensores de flexión alojados por ejemplo en el lado izquierdo y en el lado derecho de un eje de torsión del cuerpo. Los dos sensores de flexión aportarán por lo tanto señales de flexión, es decir, valores de transmisión de distinta magnitud 15 en sensores de flexión de fibra óptica. Mediante la combinación de la primera señal de flexión con la segunda señal de flexión mediante sustracción, se logra que solamente se mida el movimiento de torsión, ya que una parte de un movimiento de flexión se elimina mediante la sustracción de ambas señales de flexión. Por ejemplo puede utilizarse como sensor de flexión un sensor de flexión de fibra óptica, pudiendo alojarse el primer sensor de flexión a la izquierda y el segundo sensor de flexión a la derecha de la 20 columna vertebral sobre la espalda. Los sensores de flexión aportan, según el sentido de la flexión, distintas señales de flexión. Así por ejemplo debido a un doblado del sensor de flexión de fibra óptica en una dirección, aumentará la atenuación de la luz característica de la flexión, y por el contrario un doblado en el otro sentido provoca un descenso de la atenuación de la luz.
Preferiblemente el doblado que se presenta de la primera y segunda señal de flexión en el mismo 25 sentido espacial provoca, tanto en la primera como también en la segunda señal de flexión, un aumento o reducción. De esta manera se logra que pueda medirse la torsión mediante la señal de flexión característica de manera fiable.
En un perfeccionamiento ventajoso se miden antes de realizar la torsión una primera señal básica de flexión del primer sensor de flexión y una segunda señal básica de flexión del segundo sensor 30 de flexión, se crea una señal básica característica de flexión mediante sustracción de la primera y de la segunda señal básica de flexión y tras realizar la torsión se sustrae la señal básica característica de flexión de la señal característica de flexión averiguada.
Con este perfeccionamiento se logra que en estado de reposo, es decir, antes de la torsión del cuerpo, la señal característica de flexión sea cero y con ello se eviten imprecisiones de medida de la 35 torsión debido a la falta de calibrado de la señal característica de flexión en estado de reposo.
Además, es también parte de la invención un procedimiento alternativo para medir una torsión de un cuerpo con ayuda de sensores de flexión, estando dispuestos los sensores de flexión sobre una superficie del cuerpo, con las siguientes etapas:
Medición de la correspondiente flexión que resulta debido a la torsión en los sensores de flexión mediante...
Reivindicaciones:
1. Procedimiento para medir la torsión de un cuerpo (K) con ayuda de sensores de flexión (B1, B2), estando dispuestos los sensores de flexión sobre una superficie del cuerpo (K),
con las siguientes etapas:
medición de la flexión que se presenta en cada caso debido a la torsión en los sensores de flexión (B1, 5 B2) mediante una primera señal de flexión (T1) del primer sensor de flexión (B1) y mediante una segunda señal de flexión (T2) del segundo sensor de flexión (B2), provocando la flexión del primer y segundo sensor de flexión (B1, B2) en la misma dirección espacial un aumento de la primera señal de flexión (T1) y una reducción de la segunda señal de flexión (T2);
averiguación de una señal de flexión (CT) característica de la torsión, sumando la primera señal de 10 flexión (T1) y la segunda señal de flexión (T2).
2. Procedimiento según la reivindicación 1,
caracterizado porque antes de realizarse la torsión se miden una primera señal básica de flexión (BT1) del primer sensor de flexión (B1) y una segunda señal básica de flexión (BT2) del segundo sensor de flexión (B1), 15
se crea una señal básica característica de flexión (BCT) sumando la primera y la segunda señal básica de flexión (BT1, BT2),
tras realizarse la torsión, se sustrae la señal básica característica de flexión (BCT) de la señal característica de flexión (CT) calculada.
3. Procedimiento según una de las reivindicaciones precedentes, 20
caracterizado porque se utilizan sensores de flexión (B1, B2) que están alojados sobre la superficie del cuerpo (K) casi en paralelo al eje (A) de la torsión.
4. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque se utilizan sensores de flexión (B1, B2) que presentan la correspondiente zona sensible (Z1, Z2) con la correspondiente extensión espacial en la dirección del eje (A). 25
5. Procedimiento según una de las reivindicaciones precedentes,
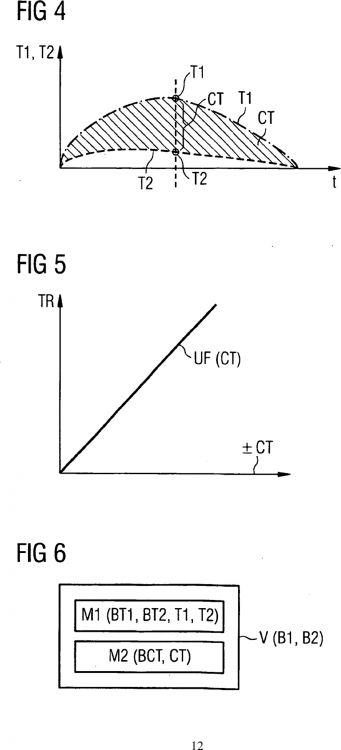
caracterizado porque se crea un ángulo de torsión (TR) perteneciente a la torsión mediante la señal característica de flexión (CT) sobre la base de una función de conversión (UF).
6. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque se mide el correspondiente par de primeras y segundas señales de flexión (T1, 30 T2) a lo largo del tiempo (t),
se averigua la evolución en el tiempo de la torsión generando la correspondiente señal característica de flexión (CT) de los correspondientes pares de la primera y segunda señal de flexión (T1, T2).
7. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque el cuerpo (K) está configurado como espalda de un paciente y el eje (A) como 35 columna vertebral del paciente.
8. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque se utilizan sensores de flexión configurados como sensores de flexión de fibra óptica.
9. Procedimiento según una de las reivindicaciones precedentes, 40
caracterizado porque antes de averiguar la señal característica de flexión, se realiza una ponderación de las correspondiente señales de flexión.
10. Dispositivo (V) para medir la torsión de un cuerpo (K),
con los siguientes medios:
primer sensor de flexión (B1) y segundo sensor de flexión (B2), dispuestos sobre una superficie del 45 cuerpo (K), provocando la flexión del primer y del segundo sensor de flexión (B1, B2) en una misma
dirección espacial un aumento de una primera señal de flexión (T1) y una reducción de una segunda señal de flexión (T2);
medios de medida (M1) para medir la correspondiente flexión que se presenta en los sensores de flexión (B1, B2) debido a la torsión mediante una primera señal de flexión (T1) del primer sensor de flexión (B1) y mediante una segunda señal de flexión (T2) del segundo sensor de flexión (B2); 5
medios de evaluación (M2) para averiguar una señal de flexión (CT) característica de la torsión sumando la primera señal de flexión (T1) y la segunda señal de flexión (T2).
11. Dispositivo (V) según la reivindicación 10,
caracterizado porque el medio de medida (M1) mide, antes de realizar la torsión, una primera señal básica de flexión (BT1) del primer sensor de flexión (B1) y una segunda señal básica de flexión (BT2) 10 del segundo sensor de flexión (B1);
el medio de evaluación (M2) sirve para crear una señal básica característica de flexión (BCT) sumando la primera y la segunda señal básica de flexión (BT1, BT2) y para sustraer la señal básica característica de flexión (BCT) de la señal característica de flexión averiguada (CT).
12. Dispositivo (V) según una de las reivindicaciones 10 a 11, 15
caracterizado porque los sensores de flexión (B1, B2) están alojados en la superficie del cuerpo (K) casi en paralelo al eje (A) de la torsión.
13. Dispositivo (V) según una de las reivindicaciones 10 a 12,
caracterizado porque los sensores de flexión (B1, B2) presentan la correspondiente zona sensible (Z1, Z2), estando dispuestas las zonas sensibles (Z1, Z2) con la correspondiente extensión espacial local 20 en la dirección del eje (A).
14. Dispositivo (V) según una de las reivindicaciones 10 a 13,
caracterizado porque el medio de evaluación (M2) crea un ángulo de torsión (TR) perteneciente a la torsión mediante la señal característica de flexión (CT) en base a una función de conversión (UF).
15. Dispositivo (V) según una de las reivindicaciones 10 a 14, 25
caracterizado porque el medio de medida (M1) mide el correspondiente par de primeras y segundas señales de flexión (T1, T2) a lo largo del tiempo (t),
el medio de evaluación (M2) averigua la evolución en el tiempo de la torsión generando la correspondiente señal característica de flexión (CT) de los correspondientes pares de la primera y segunda señal de flexión (T1, T2). 30
16. Dispositivo (V) según una de las reivindicaciones 10 a 15,
caracterizado porque el cuerpo (K) está configurado como espalda de un paciente y el eje (A) como columna vertebral del paciente.
17. Dispositivo (V) según una de las reivindicaciones 10 a 16,
caracterizado porque se utilizan sensores de flexión configurados como sensores de flexión de fibra 35 óptica.
18. Utilización del dispositivo (V) según una de las reivindicaciones 10 a 17,
caracterizada porque se utiliza el dispositivo para medir la torsión de una parte del cuerpo humano, en particular de la espalda con la columna vertebral como eje de la torsión.
40
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Control electrofisiológico de contracciones uterinas, del 10 de Junio de 2020, de Nemo Healthcare B.V: Un dispositivo de procesamiento de señales para procesar señales electrofisiológicas relacionadas con contracciones uterinas de una mujer […]
Estímulo terapéutico mejorado para un sistema de entrañado de succión no nutritiva, del 10 de Junio de 2020, de Innara Health, Inc: Un sistema de procesamiento codificado con una aplicación para estimular un CPG y un nervio trigémino en un cerebro humano, influyendo […]
Aparato y método para la evaluación automática del transcurso de una sesión de entrenamiento, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la valoración automática de un transcurso de un ejercicio de entrenamiento, que comprende: proporcionar una pluralidad de informaciones […]
 Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Sistema y método para determinar el sueño y las fases de sueño de una persona, del 22 de Abril de 2020, de V-Watch SA: Un sistema para determinar la transición de fase de sueño de una persona, el sistema que comprende: medios de detección de la frecuencia cardíaca […]
Sistema para restaurar la función muscular de la columna lumbar, del 25 de Marzo de 2020, de Mainstay Medical Limited: Un sistema para recuperar la función muscular de la columna lumbar, el sistema que comprende: uno o más electrodos configurados […]