DISPOSITIVO DE MEDICIÓN DEL DESPLAZAMIENTO DE UN VEHÍCULO AUTOGUIADO.
Dispositivo de medición del desplazamiento de un vehículo autoguiado (VEH) que comprende a bordo:
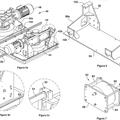
- por lo menos un acelerómetro (101) provisto de un eje de medición según una dirección longitudinal (VEx) de un principal desplazamiento del vehículo, que se supone rectilíneo, - un primer tacómetro (103b) dispuesto en un eje en la parte de delante del vehículo según la dirección longitudinal, - un segundo tacómetro (103a) está dispuesto en un segundo eje en la parte de atrás del vehículo según la dirección longitudinal, -las señales de medición que proceden del acelerómetro, del primer y del segundo tacómetro son suministradas a una unidad de cálculo, caracterizado en que, en caso de detección de pérdida de adherencia: - un sistema de medición del posicionamiento (DB) proporciona los datos de un perfil de trayectoria del vehículo, como por lo menos de una pendiente (Pte) y una curvatura (1/R), a cada posición (DX) del vehículo en desplazamiento, - el acelerómetro provisto de un eje de medición suministra una medición de una aceleración global (Gacc) del vehículo según la dirección longitudinal (VEx), - una computadora (CALC) trata los datos de perfil de trayectoria (Pte, 1/R) y de aceleración global medida (Gacc) con el fin de determinar una aceleración corregida (Gx) según una dirección longitudinal (Ox) de desplazamiento efectivo del vehículo para la cual se toman en consideración los efectos de pendiente y de curvatura
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/002030.
Dirección: 9 Boulevard Finot 93200 Saint-Denis FRANCIA.
Inventor/es: MAIRE,Alain.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Diciembre de 2007.
Clasificación PCT:
B61L25/02TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › B61L 25/00 Registro o indicación de la posición o de la identidad de vehículos o de trenes o de la posición de aparatos de la vía. › Indicación o registro de la posición o de la identidad de vehículos o de trenes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Dispositivo de medición del desplazamiento de un vehículo autoguiado La presente invención se refiere a un dispositivo de medición del desplazamiento de un vehículo autoguiado según el preámbulo de la reivindicación 1. Varios métodos o dispositivos de medición del desplazamiento, la velocidad o la aceleración de un vehículo son hoy en día conocidos, en particular para los vehículos destinados al transporte público, como una unidad vagón de un tren, de un metro, un trolebús, un tranvía, un autobús o como cualquier otro vehículo arrastrado por tracción por lo menos por un carril de guiado. En particular en el caso de un vehículo autoguiado por un sistema de tráfico (señales ferroviarias, autopilotado a bordo y/o a distancia del vehículo, etc.), las precauciones para garantizar un autoguiado seguro (contra una avería) y asegurado (para los pasajeros o las mercancías) es indispensable cualquiera que sean las propiedades de recorrido del vehículo. En este sentido, es primordial conocer bien en tiempo real la posición, la velocidad (y la aceleración) del vehículo, en particular para las situaciones donde el vehículo tiende a incurrir en pérdidas de adherencia inevitables como durante un patinaje (en el momento de una aceleración/tracción del vehículo) o de un bloqueo de las ruedas (durante un frenado del vehículo) de un eje/rueda. Cuando el vehículo guiado dispone de un eje libre de todo esfuerzo de tracción o frenado, el movimiento del vehículo es dado directamente por la rotación del eje (o de una de las ruedas asociadas a este eje). No obstante, esta solución reduce la potencia de tracción o de frenado, en consecuencia las posibilidades del vehículo, es por eso que la mayoría de los sistemas no ofrecen ejes libres. En ausencia de eje libre y para evitar las consecuencias vinculadas al patinaje/bloqueo de las ruedas en la pérdida de adherencia de una de sus ruedas, existen varios dispositivos y utilizan: - o medios de medición totalmente independientes de las ruedas, que permiten una medición de velocidad por vía óptica o por medio de un radar con efecto Doppler. Estos dispositivos de carácter costoso utilizan sin embargo la mayoría de las veces un tacómetro suplementario para el funcionamiento a velocidad baja y a la parada del vehículo, este último permite extraer la velocidad angular de una rueda o el número de revoluciones de la rueda por unidad de tiempo; - o centrales de inercia que combinan acelerómetros, girómetros y sistemas de localización terrestre como un GPS. Éstos siguen siendo no obstante muy costosos debido a su tecnología de alto nivel, la mayoría de las veces para aplicaciones a los sistemas aeronáuticos; - o, como en EP 0 716 001 B1, un solo tacómetro dispuesto en un eje y un medio para tener en cuenta un margen de seguridad de los valores medidos en una o varias ruedas con el fin de intentar compensar los efectos de un eventual patinaje/bloqueo de las ruedas, lo que deteriora los resultados de la medición de desplazamiento ya que sigue siendo todavía demasiado aproximado. Resulta también un anti-bloqueo de las ruedas de compensación que puede ser brutal para un vehículo y sus pasajeros o mercancías. En particular, la capacidad de transporte se reduce entonces a que un patinaje tenga lugar o no, ya que la dimensión del sistema debe tener en cuenta un margen suficiente de compensación en todas partes/ permanentemente. El hecho de pilotar o guiar el vehículo con la ayuda de esta sola medición que no conoce una amplitud adecuada del bloqueo de las ruedas, deteriora efectivamente la precisión de seguimiento del programa de velocidad y la precisión del frenado. Se sigue así también una reducción de las posibilidades en términos de capacidad de transporte y de precisión del frenado del sistema; - o, como en US 2005/0137761 A1, un acelerómetro embarcado en el vehículo y un tacómetro en un eje cuyas señales de medición se conectan a una computadora central adaptada, aunque no explícitamente descrita, para tener en cuenta los errores introducidos en presencia de pérdida de adherencia y suministrando la velocidad y la posición del vehículo sobre su recorrido. En particular, el acelerómetro comprende dos ejes de medición con el fin respectivamente de determinar una aceleración siguiendo una dirección de trayectoria del vehículo así como con el fin de determinar y en consecuencia tener en cuenta en el cálculo del desplazamiento una pendiente del vehículo con relación a un plano horizontal. Los valores de las señales de medición del acelerómetro y del tacómetro también se comparan a los valores umbrales de velocidad que, en caso de rebasar un umbral, permiten indicar una presencia de pérdida de adherencia (patinaje/bloqueo de las ruedas) del vehículo. Aunque tomando en consideración los efectos de pendiente sufridos por el vehículo, otros efectos vinculados a la trayectoria del vehículo en dependencia del emplazamiento del acelerómetro en el vehículo (y del posicionamiento de sus dos ejes de medición) son inevitables, porque una unidad de transporte ferroviario tiene la mayoría de las veces una geometría de carácter longilíneo a lo largo del cual un solo acelerómetro y un tacómetro colocado en la parte de delante del vehículo no pueden asegurar un medio de medición revelador de los efectos que actúan sobre el conjunto completo del vehículo, tales como por ejemplo los efectos de curvatura o de aceleración lateral. El documento DE 10 2005 001 403 A1 divulga un dispositivo de medición de la velocidad real de un vehículo ferroviario con los ejes frenados. Todos estos dispositivos permiten así calcular el movimiento de un vehículo guiado, no disponiendo de ejes libres de 2 todo esfuerzo de frenado y de tracción, circulando sobre una vía de perfil cualquiera, sin embargo con una precisión bien inferior a esta de un sistema ideal de eje libre, ya que no se pueden liberar completamente de pérdidas de adherencia (patinaje y bloqueo de las ruedas inducidos por los esfuerzos de tracción/frenado) así como de los errores inducidos por aceleraciones laterales o incluso también verticales. Un objetivo de la presente invención es proponer un dispositivo de medición del desplazamiento de un vehículo autoguiado que presenta una mayor robustez de la medición durante una pérdida de adherencia. El dispositivo se divulga en la reivindicación 1. ES 2 366 283 T3 A partir de un dispositivo para medir el desplazamiento de un vehículo autoguiado que incluye a bordo: - al menos un acelerómetro provisto de un eje de medición dispuesto según una dirección longitudinal de un potencial desplazamiento principal rectilíneo del vehículo, - un primer tacómetro dispuesto en un eje en la parte de delante del vehículo según la dirección longitudinal, - un segundo tacómetro está dispuesto en un segundo eje en la parte de atrás del vehículo según la dirección longitudinal, - señales de medición que proceden del acelerómetro, del primer y del segundo tacómetro se suministran a una unidad de cálculo, es ventajosamente posible determinar la velocidad y la posición del vehículo sobre su trayecto teniendo en cuenta una pérdida de adherencia de al menos uno de los ejes (libres o motores) así como un efecto exacto de pendiente y curvatura sobre la trayectoria del vehículo que no sigue siendo rectilínea, pero evoluciona horizontal y/o verticalmente. Al contrario de los dispositivos descritos en el estado de la técnica y por medio de la unidad de cálculo, este dispositivo puede detectar un principio de pérdida de adherencia de dos modos complementarios posibles: - o por medio de un modo de detección fundado sobre una variación de la señal de medición de uno de los dos tacómetros embarcados y colocados en lugares distintos de la trayectoria del vehículo, por ejemplo de una y otra parte del vehículo según su dirección longitudinal de desplazamiento, - o por medio de un modo de detección basado en una medición diferencial relativa de las señales de medición que provienen de los dos tacómetros. También, con el fin de detectar un intervalo de tiempo cuando dicha pérdida de adherencia tiene lugar hasta el fin de éste, el segundo modo de detección diferencial puede preconizarse al primero. Hay que tener en cuenta aquí también que el desdoblamiento del tacómetro mejora considerablemente un autoguiado del vehículo en el sentido de garantizar (redundancia garantizada en caso de una avería de uno de los tacómetros) y en el sentido de la seguridad (medición y detección de pérdida de adherencia mejor repartida sobre el vehículo para la comodidad y la seguridad de los pasajeros y/o para la estabilidad de las mercancías en caso de compensación activa del patinaje/bloqueo de las ruedas por un sistema de conducta automático (autoguiado) del vehículo y no más por otro dispositivo independiente... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de medición del desplazamiento de un vehículo autoguiado (VEH) que comprende a bordo: - por lo menos un acelerómetro (101) provisto de un eje de medición según una dirección longitudinal (VEx) de un principal desplazamiento del vehículo, que se supone rectilíneo, - un primer tacómetro (103b) dispuesto en un eje en la parte de delante del vehículo según la dirección longitudinal, - un segundo tacómetro (103a) está dispuesto en un segundo eje en la parte de atrás del vehículo según la dirección longitudinal, -las señales de medición que proceden del acelerómetro, del primer y del segundo tacómetro son suministradas a una unidad de cálculo, caracterizado en que, en caso de detección de pérdida de adherencia: - un sistema de medición del posicionamiento (DB) proporciona los datos de un perfil de trayectoria del vehículo, como por lo menos de una pendiente (Pte) y una curvatura (1/R), a cada posición (DX) del vehículo en desplazamiento, - el acelerómetro provisto de un eje de medición suministra una medición de una aceleración global (Gacc) del vehículo según la dirección longitudinal (VEx), - una computadora (CALC) trata los datos de perfil de trayectoria (Pte, 1/R) y de aceleración global medida (Gacc) con el fin de determinar una aceleración corregida (Gx) según una dirección longitudinal (Ox) de desplazamiento efectivo del vehículo para la cual se toman en consideración los efectos de pendiente y de curvatura. 2. Dispositivo según la reivindicación 1, que incluye: - un detector de pérdida de adherencia (CALC1) de al menos uno de los dos ejes, - el detector de pérdida de adherencia que está acoplado a las señales de salidas (STa, STb) de cada uno de los tacómetros, - cada señal de salida proporciona una medida de velocidad angular instantánea del eje asociado. 3. Dispositivo según la reivindicación 2, por el cual el detector de pérdida de adherencia (CALC1) comprende un indicador (Adh) de dos modos acumulables de detección de pérdida de adherencia según los cuales es detectada una variación de velocidad angular instantánea de por lo menos una de las señales de salida y/o es detectada una desviación entre las velocidades angulares de cada señal de salida. 4. Dispositivo según la reivindicación 3, por el cual la computadora (CALC) incluye: - una computadora primaria (CALC2) provista de entradas de señal para los datos de perfil de trayectoria (Pte, 1/R) y para la aceleración medida (Gacc) y una salida de señal para la aceleración corregida (Gx), - un calculador secundario (CALC3) provisto de una entrada de señal para el indicador (Adh) de detección de pérdida de adherencia resultante del detector de pérdida de adherencia (CALC1), - la computadora secundaria (CALC3) que esta provista de salidas para suministrar una velocidad estimada (Vx) y una posición estimada (Dx) del vehículo, - la computadora secundaria (CALC3) que esta provisto de entradas para las señales (STa), tacómetros para estimar la velocidad (Vx) y la posición (Dx) del vehículo, - la computadora secundaria (CALC3) esta provista de una entrada de señal para la aceleración corregida (Gx) salida del computador primario (CALC2) con el fin de reestimar la velocidad (Vx) y la posición (Dx) del vehículo al menos durante una pérdida de adherencia para la cual un valor anteriormente estimado de la velocidad (Vx) se transmite de la computadora secundaria (CALC3) a la computadora primaria (CALC2) para efectuar una reestimación de la aceleración corregida (Gx). 5. Dispositivo según la reivindicación 3, por la cual: ES 2 366 283 T3 7 - la aceleración corregida (Gx) es la suma de la aceleración global medida (Gacc), de la aceleración bajo efecto de la pendiente (Gpte) y de la aceleración bajo efecto de la curvatura (Glat), - la aceleración bajo efecto de la pendiente (Gpte) es proporcional a la gravedad, - la aceleración bajo un efecto de curvatura (Glat) es el producto entre: a) un seno de un ángulo instantáneo (A) cuyo vértice está en el centro de la curvatura (1/R) y cuyos lados pasan por el centro del vehículo y por el acelerómetro b) y la velocidad (Vx) elevada al cuadrado y dividida por la suma de un radio (R) de la curvatura (1/R) y de una distancia lateral (Ly) del acelerómetro con relación al centro del vehículo, - el ángulo instantáneo (A) se aproxima por una distancia longitudinal (Lx) del acelerómetro con relación al centro del vehículo dividida por la suma del radio de curvatura (R) y de la distancia lateral (Ly) del acelerómetro con relación al centro del vehículo. - donde la distancia longitudinal (Lx) es positiva o negativa según que el acelerómetro esté dispuesto en la parte de delante o de atrás del vehículo según su dirección de desplazamiento y la distancia lateral (Ly) es positiva o negativa según que el acelerómetro este dispuesto en el exterior o en el interior de una curva relativa a la curvatura (1/R). 6. Dispositivo según una de las reivindicaciones anteriores 3 a 5, por el cual, antes de una detección de pérdida de adherencia la computadora secundaria (CALC3) proporciona la velocidad (Vx) y la posición (Dx) del vehículo por medio de parámetros dinámicos vinculados a la rotación de al menos uno de los ejes. 7. Dispositivo según la reivindicación 6, ES 2 366 283 T3 por el cual, en el momento de una pérdida de adherencia la computadora secundaria (CALC3) suministra la velocidad (Vx) a la computadora primaria (GALC2), esta última suministra en retorno la aceleración (Gx) a la computadora secundaria (CALC3). 8. Dispositivo según una de las reivindicaciones precedentes 3 a 7, por el cual, el acelerómetro contiene varios ejes de medición distintos (con el fin de precisar la determinación de la aceleración corregida (Glong) y\o de compensar una pérdida de información que procede del sistema de medición de posicionamiento que proporciona los datos odométricos). 8 ES 2 366 283 T3 9 ES 2 366 283 T3
Patentes similares o relacionadas:
Sistema y procedimiento para el acoplamiento / desacoplamiento de vehículos guiados en movimiento durante el funcionamiento, del 1 de Julio de 2020, de Siemens Rail Automation S.A.U: Procedimiento para el acoplamiento / desacoplamiento de una unidad de vehículo guiado A2 a/de una unidad de vehículo guiado A1, mientras que dichas unidades de vehículos guiados […]
Procedimiento y disposición para la localización de un vehículo ferroviario en circulación en un sistema de control de tren y de protección de tren CBTC (control de trenes basado en comunicaciones), del 27 de Mayo de 2020, de Siemens Mobility GmbH: Procedimiento para la localización de un vehículo ferroviario que circula en un sistema de control y protección de trenes CBTC (Control de […]
Procedimiento para operar un dispositivo de localización, así como dispositivo de localización, del 13 de Mayo de 2020, de Siemens Mobility GmbH: Procedimiento para operar un dispositivo de localización que, para localizar un vehículo guiado por carriles sobre una sección de línea , […]
Procedimiento y sistema de comunicación para el intercambio de información entre vehículos guiados, del 5 de Febrero de 2020, de Siemens Rail Automation S.A.U: Sistema RFID configurado para estar instalado a bordo de un primer vehículo guiado (A) con el fin de permitir a este último intercambiar información automáticamente con […]
Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Sistema y método para localizar y registrar automáticamente una baliza, del 8 de Enero de 2020, de Siemens Rail Automation S.A.U: Sistema autónomo , para detectar, localizar y registrar automáticamente al menos una baliza instalada en un punto a lo largo de una vía […]
Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Sistema de localización de trenes a lo largo de las vías de una red ferroviaria, del 18 de Diciembre de 2019, de CLEARSY: Sistema de localización de trenes a lo largo de las vías de una red ferroviaria para una arquitectura de control automático de trenes, […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]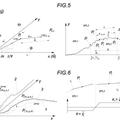 Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]
Procedimiento y dispositivo para medir y calcular una vía de ferrocarril, del 25 de Diciembre de 2019, de HP3 Real GmbH: Procedimiento para medir y calcular el asiento de una vía férrea mediante un carro medidor de la vía (A), que puede rodar sobre la vía, con por lo menos […]