PROCEDIMIENTO PARA LA SUSTITUCIÓN DE COMPONENTES ESTRUCTURALES PARA UN SISTEMA DE AUTOMATICACIÓN.
Procedimiento para la sustitución de componentes estructurales para un sistema de automatización,
en el que - se crea un tipo de un componente estructural por medio de una herramienta de proyección en un entorno de proyección y se identifica de forma unívoca, - se proyecta el componente estructural en un plan de funciones, se fijan los parámetros y se conecta con otros módulos, - se activa la instancia proyectada del componente estructural en el entorno de ejecución, con lo que se ejecuta la función en el sistema de automatización, caracterizado porque durante el funcionamiento en curso del sistema de automatización, independientemente del desarrollo de la función del componente estructural - se abre el tipo del componente estructural por medio de la herramienta de proyección en el entorno de proyección y se modifica, permaneciendo la identificación, - se sustituye la instancia del componente estructural en el plan de funciones por el componente estructural modificado, anotando de manera correspondiente las modificaciones de la estructura, - en paralelo y sin repercusiones sobre el funcionamiento en curso del sistema de automatización, se transmite el componente estructural sustituido al sistema de automatización, - en el sistema de automatización se conmuta sin interrupción a la modificación realizada, de manera que se activa el componente estructural modificado y sustituido
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/051800.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: DREBINGER,ANDREAS.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Febrero de 2008.
Clasificación Internacional de Patentes:
- G05B19/05P
Clasificación PCT:
- G05B19/05 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Controladores lógicos programables, p. ej. que simulen las interconexiones lógicas de señales según diagramas en escalera o gráficos de funciones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
La invención se refiere a un procedimiento para la sustitución de componentes estructurales para un sistema de automatización.
La automatización de instalaciones grandes, como por ejemplo centrales eléctricas, requiere 5 sistemas técnicos de mando y sistemas de automatización flexibles y que se puedan aplicar de múltiples maneras, para manipular los cometidos de control y de regulación cada vez más complejos.
Las modificaciones o adaptaciones a condiciones actívales se realizan en sistema técnico de mando por medio de la proyección. En este caso, actualmente se manejan en una medida predominante herramientas de proyección gráfica. Las modificaciones realizadas en el sistema técnico de mando en el 10 entorno de la proyección se llevan a cabo en el entorno de desarrollo del sistema de automatización subordinado jerárquicamente, que está constituido por una pluralidad de controles programables con memoria.
En la norma europea EN 61131-3, también conocida como IEC 61131-3 o IEC 1131-3 se definen cinco lenguajes de programación, con lo que se pueden programar controles programables con memoria. 15 Un ejemplo de una herramienta de proyección gráfica es el lenguaje de programación gráfica Continuous Function Chart (CFC), que encuentra aplicación especialmente en controles programables con memoria en la técnica de automatización. Un componente de la norma mencionada anteriormente es, además, el lenguaje de módulos funcionales Function Block Diagram (FBS). En este caso se trata igualmente de un lenguaje de programación orientado a gráficos. En el programa FBS se representan funciones a través de 20 módulos funcionales con entradas y salidas y sus aplicaciones por medio de líneas. Además, están contenidas también variables y constantes. Tal programa FBF se designa con frecuencia también como plan de funciones.
Dentro de un plan de funciones existen diferentes tipos de módulos funcionales. A continuación se consideran en particular los llamados componentes estructurales, que se caracterizan porque se pueden 25 configurar libremente y se pueden aplicar de una manera específica del usuario. De acuerdo con ello, como componente estructura se designa en el sentido de la norma EN 61131-3 un tipo de módulo que puede ser creado libremente por un usuario a través de la fijación de parámetros y la conexión de tipos básicos (es decir, módulos estándar). De acuerdo con ello, un tipo de componente estructural se puede proyectar varias veces como un tipo de módulo estándar. 30
Una modificación de un componente estructural de este tipo estaba ligada hasta ahora siempre con un gasto muy grande durante la proyección. Como otros módulos del programa debían modificarse componentes estructurales siempre manualmente en todos los lugares entro del plan de funciones. En particular, no existían posibilidades de modificación flexibles ni posibilidades de actualización de componentes estructurales existentes ya proyectados y activados en el sistema de automatización en el 35 funcionamiento en curso. Cualquier modificación en la proyección iba unida siempre con limitaciones considerables del funcionamiento en curso. En general, el proceso en curso debía interrumpirse.
En la solicitud de patente europea EP 0 757 305 A1 se describe un control programable libremente (“programmable logic controller” = PLC) para la realización de un proceso de control en un sistema de automatización a través de la ejecución de un programa de usuario. Dentro de un 40 microprocesador del control se puede colocar una marca, que tiene como consecuencia que dentro de un periodo de tiempo determinado no se puede realizar ninguna modificación en el programa de usuario. Las modificaciones a realizar eventualmente son depositadas en una memoria de trabajo. Si debe realizarse realmente la modificación, lo que se indica a través de una instrucción correspondiente, debe anularse la marca colocada anteriormente. Solamente después de la anulación de la marca se ejecuta de forma 45 automática la modificación del programa depositada en la memoria de trabajo y se prosigue el proceso modificado en el ciclo siguiente.
El cometido de la invención es indicar un procedimiento para la sustitución de componentes estructurales para un sistema de automatización, en el que el funcionamiento en curso del sistema de automatización no se interrumpe a través de la introducción de modificaciones proyectadas. 50
Este cometido se soluciona a través de las características de la reivindicación independiente 1 de la patente. Las configuraciones ventajosas se reproducen en cada caso en las reivindicaciones dependientes de la patente.
De acuerdo con la invención, durante el funcionamiento en curso del sistema de automatización, independientemente del desarrollo de la función del componente estructural, se modifica un tipo de un 55 componente estructural en primer lugar por medio de una herramienta de proyección en el entorno de proyección, manteniéndose siempre una identificación del tipo. A continuación, se sustituye la instancia del componente estructural en el plan de funciones por el componente estructural modificado y se anotan de manera correspondiente las modificaciones estructurales. En una etapa siguiente, se transmite paralelamente o sin repercusión sobre el funcionamiento en curso del sistema de automatización el 5 componente estructural sustituido al sistema de automatización. En el sistema de automatización se conmuta entonces sin interrupción a una configuración, que tiene en cuenta el componente estructural sustituido, de manera que se activa el componente estructural modificado y sustituido.
A través de la invención se consigue de manera ventajosa una solución técnica flexible y que se puede aplicar de múltiples maneras para la modificación sin impacto de funciones de automatización 10 dentro de un sistema técnico de mando o de un sistema de automatización.
Se pueden crear componentes estructurales específicos del usuario y que se pueden configurar libremente y que se pueden sustituir de manera discrecional durante el funcionamiento en curso. Ahora se puede realizar una actualización de componentes existentes, ya proyectados y activados en el sistema de automatización sin interrupción o repercusiones sobre el proceso. Además, el usuario tiene especialmente 15 la posibilidad de limitar la actualización del tipo del componente estructural en primer lugar a determinadas instancias. Las verificaciones de la consistencia interna garantizan una introducción libre de repercusiones de modificaciones de la proyección.
Otra ventaja de la invención está en que no se pueden plantear requerimientos adicionales al sistema de automatización básico y, por lo tanto, no se pueden crear componentes estructurales neutrales 20 al sistema objetivo. De esta manera, en un sistema técnico de mando se puede ejecutar uno y el mismo componente estructural, por ejemplo tanto en un sistema de automatización SIMATIC S7 de la Fa. Siemens como también en un contenedor de automatización basado en Java.
A continuación se explica en detalle la invención con la ayuda de un ejemplo de realización representado en los dibujos. En este caso: 25
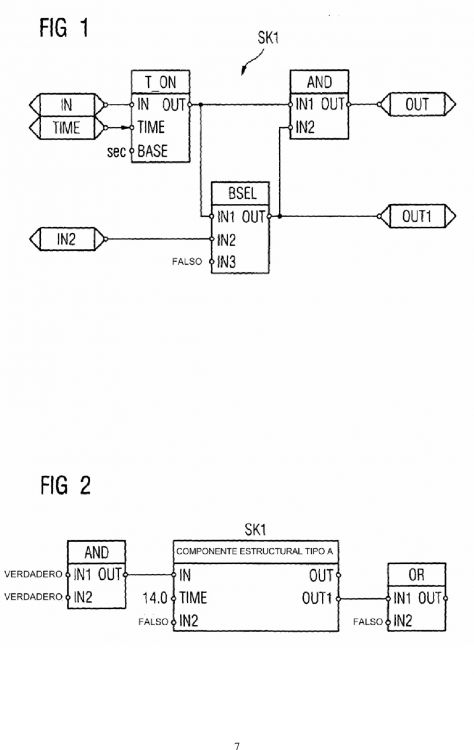
La figura 1 muestra un esquema de conexiones de un primer componente estructural SK1.
La figura 2 muestra un fragmento de un plan funcional con una instancia del tipo de componente estructural definido en la figura 1.
La figura 3 muestra un esquema de conexiones del componente estructura SK1 modificado.
La figura 4 muestra un fragmento de un plan de funciones con una instancia del tipo de 30 componente estructuras definido en la figura 3.
La figura 5 muestra un esquema de conexiones del plan de funciones subordinado del componente estructural SK1 modificado.
La figura 1 muestra un esquema de conexiones detallado de un componente estructural SK1. El componente estructural SK1 comprende en este ejemplo de realización tres módulos estándar T_ON, 35 BSEL y AND, que están conectados entre sí para la consecución de una función determinada. Cada módulo posee al menos una entrada y una salida. En este ejemplo de realización las entradas IN y TIME del módulo T_ON están conectadas con los conectores IN y TIME. De una manera correspondiente, la entrada N2 del módulo BSEL está conectada con el conector IN2. Los conectores dispuestos en el lado izquierdo de la figura representan las interfaces de entrada del componente estructural SK1. A través de...
Reivindicaciones:
1. Procedimiento para la sustitución de componentes estructurales para un sistema de automatización, en el que
- se crea un tipo de un componente estructural por medio de una herramienta de proyección en un entorno de proyección y se identifica de forma unívoca, 5
- se proyecta el componente estructural en un plan de funciones, se fijan los parámetros y se conecta con otros módulos,
- se activa la instancia proyectada del componente estructural en el entorno de ejecución, con lo que se ejecuta la función en el sistema de automatización,
caracterizado porque durante el funcionamiento en curso del sistema de automatización, 10 independientemente del desarrollo de la función del componente estructural
- se abre el tipo del componente estructural por medio de la herramienta de proyección en el entorno de proyección y se modifica, permaneciendo la identificación,
- se sustituye la instancia del componente estructural en el plan de funciones por el componente estructural modificado, anotando de manera correspondiente las modificaciones de la estructura, 15
- en paralelo y sin repercusiones sobre el funcionamiento en curso del sistema de automatización, se transmite el componente estructural sustituido al sistema de automatización,
- en el sistema de automatización se conmuta sin interrupción a la modificación realizada, de manera que se activa el componente estructural modificado y sustituido.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque la modificación del 20 tipo del componente estructural se realiza a través de la adición o retirada de módulos contenidos, de circuitos, de parámetros o de interfaces externas.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, caracterizado porque dentro del sistema de automatización están colocadas al menos dos configuraciones de la proyección, porque en el funcionamiento en curso se ejecuta siempre una de estas configuraciones en el sistema de 25 automatización, porque el componente estructural sustituido se transmite durante la primera configuración en curso a la segunda configuración, y porque a continuación se conmuta sin interrupción a la segunda configuración, de manera que se activa el componente estructural modificado y sustituido.
4. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque en el sistema de automatización se puede conmutar sin interrupción, en caso necesario, a la configuración anterior.
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque antes de la introducción de modificaciones proyectadas, se realizan verificaciones de consistencia en el 30 sistema de automatización.
Siguen tres páginas de dibujos.
Patentes similares o relacionadas:
 DISPOSITIVO Y MÉTODO PARA LA SIMULACIÓN DE UN PROCESO PARA LA MECANIZACIÓN DE UNA PIEZA DE TRABAJO EN UNA MÁQUINA HERRAMIENTA, del 2 de Marzo de 2011, de DMG ELECTRONICS GMBH: Dispositivo para la simulación de un proceso para la mecanización de una pieza de trabajo en una máquina herramienta, que comprende - un primer […]
DISPOSITIVO Y MÉTODO PARA LA SIMULACIÓN DE UN PROCESO PARA LA MECANIZACIÓN DE UNA PIEZA DE TRABAJO EN UNA MÁQUINA HERRAMIENTA, del 2 de Marzo de 2011, de DMG ELECTRONICS GMBH: Dispositivo para la simulación de un proceso para la mecanización de una pieza de trabajo en una máquina herramienta, que comprende - un primer […]
 SISTEMA DE CONTROL Y COMUNICACION QUE INCLUYE POR LO MENOS UNA UNIDAD DE AUTOMATIZACION, del 27 de Agosto de 2010, de SIEMENS AKTIENGESELLSCHAFT: Sistema de control y comunicación que incluye por lo menos una unidad de automatización que está adaptada para ejecutar un programa de operación, y una […]
SISTEMA DE CONTROL Y COMUNICACION QUE INCLUYE POR LO MENOS UNA UNIDAD DE AUTOMATIZACION, del 27 de Agosto de 2010, de SIEMENS AKTIENGESELLSCHAFT: Sistema de control y comunicación que incluye por lo menos una unidad de automatización que está adaptada para ejecutar un programa de operación, y una […]
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Sistema de extensión de la red PLC, del 22 de Abril de 2020, de LSIS Co., Ltd: Un sistema de extensión de red de PLC, Controlador Lógico Programable, que incluye una base básica y una pluralidad de bases de extensión (200-1, 200-2,..., […]
Controlador lógico programable, del 22 de Abril de 2020, de LSIS Co., Ltd: Un controlador lógico programable, PLC, que tiene una pluralidad de módulos de comunicación, el PLC que comprende: un módulo de control que se […]
Sistema PLC con servidor web y memoria particionada, del 22 de Enero de 2020, de LSIS Co., Ltd: Un sistema de controlador lógico programable (PLC) conectado a una tarjeta de memoria , que comprende: un sistema de archivos configurado para dividir […]
Método para depurar un programa PLC, del 25 de Diciembre de 2019, de LSIS Co., Ltd: Un método para usar un microprocesador de propósito general para depurar un controlador lógico programable, PLC, el método comprende: recibir en una unidad de procesamiento […]
Método de compilación óptima de un comando de PLC, del 27 de Noviembre de 2019, de LSIS Co., Ltd: Un método para compilar un comando de PLC, controlador lógico programable, el método que comprende: elegir un esquema de procesamiento de compilación de una pluralidad […]