PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR Y RECONSTRUIR UNA ZONA DE IMAGEN PRONOSTICADA.
Procedimiento para determinar una zona de imagen pronosticada (PBB) para una zona de imagen (BB) de una imagen (B0),
en el que a) se determina en una primera etapa un predictor temporal (ZP) para la zona de imagen (BB) en base a una imagen anterior reconstruida (RB) que precede en el tiempo a la imagen (B0), b) se determina en una segunda etapa un predictor local (OP) para la zona de imagen (BB) dentro de una zona de imagen reconstruida (RBB) de la imagen (B0), que minimiza la magnitud del error (FM) entre la zona de imagen a pronosticar (BB) y la zona de imagen pronosticada (PBB) en base a los predictores temporal y local (ZP, OP), c) la zona de imagen pronosticada (PBB) se determina mediante el predictor local (OP) utilizando la zona de imagen reconstruida (RBB) y mediante el predictor temporal (ZP), utilizando una de las imágenes precedentes (RB)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/066683.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: PANDEL, JURGEN, KUTKA, ROBERT, BASE,GERO, AGTHE,Bernhard, OERTEL,Norbert.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Septiembre de 2006.
Clasificación Internacional de Patentes:
- H04N7/26M2N
- H04N7/34
- H04N7/36C
Clasificación PCT:
- H04N7/34
- H04N7/36
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2364079_T3.pdf
Fragmento de la descripción:
La invención se refiere a un procedimiento y un dispositivo para determinar una zona de imagen pronosticada, así como a un procedimiento y un dispositivo para reconstruir una zona de imagen pronosticada.
En la transmisión digital de datos de video con elevada resolución y coeficiente de repetición de imagen se necesitan procedimientos de codificación de video con gran eficiencia de compresión. Entonces se prescribe a menudo al procedimiento de codificación de video una velocidad de transmisión con la que debe alcanzarse una alta calidad de la imagen.
Los procedimientos de codificación de video hoy usuales están estandarizados por ejemplo como MPEG2, MPEG4, ITU H.261, H.263 y H.264 (MPEG – Motion Picture Expert Group, Grupo de Expertos en Películas Animadas, ITU – International Telecommunication Union, Unión Internacional de Telecomunicaciones). Estos procedimientos de codificación de video se basan en un principio híbrido, compuesto por una predicción en el tiempo o temporal del contenido de una imagen (= compensación de movimiento), junto con una transformación, por ejemplo una DCT o bien ICT (DCT – Discrete Cosinus Transformation, transformada discreta coseno; ICT – Integer Coded Transformation, transformada codificada en número entero) y una cuantificación de la señal de error restante tras la compensación de movimiento y la transformación. En este procedimiento de codificación de video se transmiten esencialmente los parámetros del modelo de movimiento (vectores, modo de bloqueo) y los coeficientes resultantes de la señal de error residual.
Mediante una mejora de la eficiencia de la compresión a igualdad de calidad de la imagen, se reduce la velocidad de los datos que se transmiten para transmitir una secuencia de video comprimida. Esto puede por ejemplo lograrse mediante una mejora de la predicción. Además, haciendo más fina la retícula de puntos de imagen pasando de una precisión a nivel de píxel a una precisión a nivel de semipixel, puede mejorarse la estimación del movimiento y con ello la compensación del movimiento. Un aumento adicional de la eficiencia de la compresión puede lograrse reduciendo el tamaño del bloque para el que se realiza la correspondiente predicción en el marco de la estimación de movimiento o bien compensación de movimiento. Además de una inter-predicción, es decir, el aprovechamiento de una correlación entre imágenes que se han tomado en diferentes instantes, puede lograrse mediante una intra-predicción un aumento de la eficiencia de la compresión. En esta intra-predicción se realiza una predicción para una zona de imagen en base a contenidos de imagen ya codificados y reconstruidos de la imagen actual.
Por una solicitud de patente europea EP 1 501 312 A2 se conoce un método de codificación y decodificación de imágenes, así como un dispositivo que prevé para una predicción de un bloque de imágenes, además de una predicción local y temporal, también una predicción ponderada. La predicción ponderada prevé que un valor de un punto de imagen utilizado para la predicción se forme mediante adición ponderada de uno o varios valores de puntos de imagen de un bloque tal que este valor del punto de imagen o este conjunto de valores de puntos de imagen se multiplique por un primer factor de ponderación y la multiplicación del primer factor de ponderación y del valor del punto de imagen se superpongan aditivamente con un segundo factor de ponderación.
Es tarea de la presente invención lograr una posibilidad con la que sea posible una mejora de la predicción.
Esta tarea se resuelve mediante las respectivas reivindicaciones independientes. Ventajosos perfeccionamientos de la invención se reflejan en las reivindicaciones dependientes.
En el procedimiento para determinar una zona de imagen pronosticada para una zona de imagen de una imagen, se determina un predictor temporal para la zona de imagen en base a una imagen anterior reconstruida referida a la imagen precedente en el tiempo, y se determina un predictor local para la zona de imagen dentro de una zona reconstruida de la imagen, minimizándose la magnitud del error entre la zona de imagen y la zona de imagen pronosticada en base a los predictores temporal y local, determinándose la zona de imagen pronosticada mediante el predictor local utilizando la zona de imagen reconstruida y mediante el predictor temporal utilizando una de las imágenes precedentes.
Mediante el procedimiento correspondiente a la invención se reduce un error de predicción (= magnitud del error) en base a la zona de imagen reconstruida mediante los predictores local y temporal y a la zona de imagen a predecir. Así puede incrementarse la eficiencia de la compresión, con lo que es posible un volumen de memoria reducido o bien un tramo de transmisión de banda estrecha para memorizar o transmitir una zona de imagen comprimida o bien datos de imagen con el procedimiento correspondiente a la invención.
Cuando se genera la zona de imagen pronosticada combinando una primera zona de imagen formada por el predictor temporal y una segunda zona de imagen descrita por el predictor local en base a una regla de combinación, puede lograrse otra reducción adicional del error de predicción adaptando la regla de combinación a la zona de imagen a predecir.
Si se describe preferiblemente mediante la regla de combinación una combinación ponderada mediante factores de ponderación de puntos de imagen que se correspondan de la primera y la segunda zona de imagen, entonces puede realizarse la regla de combinación de manera sencilla y eficiente.
**(Ver fórmula)**
Además, pueden describirse individualmente los factores de ponderación para cada punto de imagen de la primera y/o de la segunda zona de imagen. De esta manera se logra una mejora adicional de la predicción de la zona de imagen a predecir o bien una reducción del error de predicción.
Alternativamente a ello, puede realizarse preferiblemente en base a la regla de combinación un giro o corte de al menos la primera o la segunda zona de imagen. Así puede seguirse afinando una adaptación de la primera y/o segunda zona de imagen, con lo que es posible aumentar la precisión de la predicción.
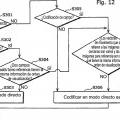
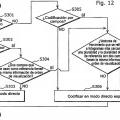
En una ampliación ventajosa del procedimiento, se elige a partir de un conjunto de distintas reglas de combinación aquellas reglas de combinación que minimizan la magnitud del error. Esto tiene la ventaja de que con un pequeño coste adicional en señalización puede transmitirse la regla de combinación elegida desde un emisor, por ejemplo con un dispositivo para realizar el procedimiento para determinar una zona de imagen pronosticada, a un receptor con un dispositivo para realizar el procedimiento para reconstruir una zona de imagen pronosticada.
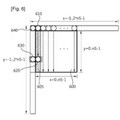
Si se referencia mediante el predictor local una zona de imagen dentro de la zona ya reconstruida de la imagen, entonces puede mejorarse más aún la exactitud de la predicción del procedimiento.
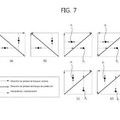
Preferiblemente se elige para determinar el predictor local a partir de un grupo de modos de intra-predicción que pueden predeterminarse aquel modo de intra-predicción que minimice la magnitud del error. De esta manera es posible una forma de proceder sencilla para determinar el predictor local. Además, reutilizando modos de intrapredicción ya conocidos por los estándares, como por ejemplo H.264, puede lograrse una implementación económica.
La invención se refiere también a un procedimiento para reconstruir una zona de imagen pronosticada, determinándose la zona de imagen pronosticada mediante un predictor local y un predictor temporal, formados según una de las reivindicaciones precedentes, en los que la zona de imagen pronosticada se genera mediante combinación de una primera zona de imagen formada por el predictor temporal y una segunda zona de imagen descrita por el predictor local.
De esta manera se proporciona un procedimiento con el que pueden utilizarse para la reconstrucción los predictores local y temporal averiguados para determinar una zona de imagen pronosticada para una zona de imagen de una imagen. Así puede utilizarse el procedimiento para reconstruir una zona de imagen pronosticada en el marco de un procedimiento de codificación de video en un receptor.
El dispositivo de averiguación para determinar una zona de imagen pronosticada para una zona de imagen de una imagen incluye un primer módulo para determinar un predictor temporal para la zona de imagen de la imagen en base a una imagen anterior reconstruida... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar una zona de imagen pronosticada (PBB) para una zona de imagen (BB) de una imagen (B0), en el que
a) se determina en una primera etapa un predictor temporal (ZP) para la zona de imagen (BB) en base a una imagen anterior reconstruida (RB) que precede en el tiempo a la imagen (B0),
b) se determina en una segunda etapa un predictor local (OP) para la zona de imagen (BB) dentro de una zona de imagen reconstruida (RBB) de la imagen (B0), que minimiza la magnitud del error (FM) entre la zona de imagen a pronosticar (BB) y la zona de imagen pronosticada (PBB) en base a los predictores temporal y local (ZP, OP),
c) la zona de imagen pronosticada (PBB) se determina mediante el predictor local (OP) utilizando la zona de imagen reconstruida (RBB) y mediante el predictor temporal (ZP), utilizando una de las imágenes precedentes (RB).
2. Procedimiento según la reivindicación 1,
caracterizado porque la zona de imagen pronosticada (PBB) se forma mediante combinación de una primera zona de imagen (BBT) formada por el predictor temporal (ZP) y una segunda zona de imagen (BBO) descrita por el predictor local (OP), en base a una regla de combinación (VKR).
3. Procedimiento según la reivindicación 2,
caracterizado porque mediante la regla de combinación (VKR) se describe una combinación ponderada mediante puntos de imagen (BP) de la primera y la segunda zona de imagen (BBT, BBO) mediante factores de ponderación (α, β).
4. Procedimiento según la reivindicación 3,
caracterizado porque los factores de ponderación (α, β) se describen individualmente para cada punto de imagen (BP) de la primera y/o de la segunda zona de imagen (BBT, BBO).
5. Procedimiento según una de las reivindicaciones 2 a 4,
caracterizado porque en base a la regla de combinación (VKR) se realiza un giro o corte de al menos la primera o la segunda zona de imagen (BBT, BBO).
6. Procedimiento según una de las reivindicaciones 2 a 5,
caracterizado porque de entre un conjunto de distintas reglas de combinación, se elige aquella regla de combinación (VKR) que minimiza la magnitud del error (FM).
7. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque mediante el predictor local (OP) se referencia una zona de imagen dentro de la zona de imagen (RBB) ya reconstruida de la imagen (BO).
8. Procedimiento según una de las reivindicaciones precedentes,
caracterizado porque para determinar el predictor local (OP) de entre un grupo de modos de intra-predicción que pueden predeterminarse, se elige aquel modo de intra-predicción (IPM) que minimiza la magnitud del error (FM).
9. Procedimiento para reconstruir una zona de imagen pronosticada (PBB),
en el de la zona de imagen pronosticada (PBB) se determina mediante un predictor local y un predictor temporal (OP, ZP), formados en base a un procedimiento para determinar una zona de imagen pronosticada según una de las reivindicaciones precedentes, en el que la zona de imagen pronosticada (PBB) se genera mediante combinación de una primera zona de imagen (BBT) formada por el predictor temporal (ZP) y una segunda zona de imagen (BBO) descrita por el predictor local (OP).
10. Dispositivo de averiguación (VE) para determinar una zona de imagen pronosticada (PBB) para una zona de imagen (BB) de una imagen (B0), con
- un primer módulo (M1) para determinar un predictor temporal (ZP) para la zona de imagen (BB) de la imagen (B0) en base a una imagen anterior reconstruida (RB) precedente en el tiempo a la imagen (B0) en una primera etapa,
**(Ver fórmula)**
- un segundo módulo (M2) para determinar un predictor local (OP) en una segunda etapa para la zona de imagen (BB) en base a una zona de imagen reconstruida (RBB) de la imagen (BO), que minimiza la magnitud del error (FM) entre la zona de imagen a predecir (BB) y la zona de imagen pronosticada (PBB) en base a los predictores temporal y local (ZP, OP), determinándose la zona de imagen pronosticada (PBB) mediante el predictor local (OP) utilizando la zona de imagen reconstruida (RBB) y mediante el predictor temporal (ZP) utilizando una de las imágenes precedentes (RB).
11. Dispositivo de reconstrucción (VD) para reconstruir una zona de imagen pronosticada (PBB), determinándose la zona de imagen pronosticada (PBB) mediante un predictor local y un predictor temporal (OP, ZP), habiéndose formado el predictor local (OP) y el predictor temporal (ZP) en base a un dispositivo de averiguación (VE) para
10 determinar una zona de imagen pronosticada (PBB) según la reivindicación 10, con
- un primer módulo de reconstrucción (M'1) para formar una primera zona de imagen (BBT) en base al predictor temporal (ZP) y una imagen anterior (RB) precedente en el tiempo a la imagen (BO);
- un segundo módulo de reconstrucción (M'2) para formar la segunda zona de imagen (BBO) en base a una zona de imagen ya reconstruida (RBB) en la imagen (BO);
15 -un tercer módulo de reconstrucción (M'3) para reconstruir la zona de imagen pronosticada (PBB) combinando la primera y la segunda zona de imagen (BBT, BBO).
Patentes similares o relacionadas:
Cálculo del vector de movimiento en modo directo evitando divisiones por cero, del 14 de Diciembre de 2016, de Godo Kaisha IP Bridge 1: Un sistema de codificación y decodificación de imágenes en movimiento que incluye un aparato de codificación en modo directo temporal para realizar codificación de campo […]
Procedimiento de intra predicción determinante de unidad de codificación de imagen y unidad de decodificación de imagen, del 18 de Mayo de 2016, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de decodificación de una imagen, comprendiendo el procedimiento: dividir un cuadro actual en una pluralidad de unidades de codificación máxima, […]
Procedimiento y dispositivo de codificación de imágenes que implementa una predicción mejorada, procedimiento y dispositivo de decodificación, señal y programas informáticos correspondientes, del 8 de Febrero de 2016, de Orange: Procedimiento de codificación de datos de imágenes, estando una imagen dividida en bloques, implementando dicho procedimiento las etapas de: - predicción […]
Codificación adaptativa de modalidad de predicción de bloques de vídeo, del 17 de Diciembre de 2014, de QUALCOMM INCORPORATED: Un procedimiento de codificación de datos de vídeo, comprendiendo el procedimiento: seleccionar, entre un conjunto de modalidades de intra-predicción […]
 Procedimiento de codificación de imágenes en movimiento y procedimiento de decodificación de imágenes en movimiento, del 6 de Agosto de 2014, de Panasonic Intellectual Property Corporation of America: Un procedimiento de codificación en modo directo temporal para realizar codificación de campo de un bloque actual de una imagen usando un vector […]
Procedimiento de codificación de imágenes en movimiento y procedimiento de decodificación de imágenes en movimiento, del 6 de Agosto de 2014, de Panasonic Intellectual Property Corporation of America: Un procedimiento de codificación en modo directo temporal para realizar codificación de campo de un bloque actual de una imagen usando un vector […]
 Procedimiento de codificación de fotogramas de movimiento y procedimiento de decodificación de fotogramas de movimiento, del 2 de Julio de 2014, de Panasonic Intellectual Property Corporation of America: Un procedimiento de decodificación en modo directo temporal para llevar a cabo una decodificación por campos de un bloque actual de un fotograma usando un vector […]
Procedimiento de codificación de fotogramas de movimiento y procedimiento de decodificación de fotogramas de movimiento, del 2 de Julio de 2014, de Panasonic Intellectual Property Corporation of America: Un procedimiento de decodificación en modo directo temporal para llevar a cabo una decodificación por campos de un bloque actual de un fotograma usando un vector […]
 Método de predicción intra, y codificador y descodificador que lo usan, del 12 de Mayo de 2014, de LG ELECTRONICS INC.: La presente invención se refiere a un método de predicción intra y a un codificador y descodificador que lo usan. El método de predicción intra según una realización […]
Método de predicción intra, y codificador y descodificador que lo usan, del 12 de Mayo de 2014, de LG ELECTRONICS INC.: La presente invención se refiere a un método de predicción intra y a un codificador y descodificador que lo usan. El método de predicción intra según una realización […]
 Procedimiento y aparato para intra-predicción en pantalla, del 25 de Marzo de 2014, de KT Corporation: La presente invención se refiere a un procedimiento y aparato para la intra-predicción. El procedimiento de intra-predicción para un descodificador, según la presente invención, […]
Procedimiento y aparato para intra-predicción en pantalla, del 25 de Marzo de 2014, de KT Corporation: La presente invención se refiere a un procedimiento y aparato para la intra-predicción. El procedimiento de intra-predicción para un descodificador, según la presente invención, […]