PROCEDIMIENTO DE DETECCIÓN DE UN FENÓMENO PERTURBADOR DE LA VISIBILIDAD PARA UN VEHÍCULO.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08167694.
Solicitante: VALEO VISION.
Nacionalidad solicitante: Francia.
Dirección: PROPRIETE INDUSTRIELLE 34, RUE SAINT ANDRE 93012 BOBIGNY CEDEX FRANCIA.
Inventor/es: LELEVE, JOEL, Rebut,Julien , Hue,David.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Octubre de 2008.
Clasificación Internacional de Patentes:
- B60Q1/14C1B
- G01N21/53C
- G06K9/00V6
Clasificación PCT:
- G01N21/53 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › en una corriente de fluido, p. ej. en el humo.
- G06T7/60 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Sector de la invención
La presente invención se refiere a un procedimiento de detección de un fenómeno perturbador de visibilidad para un vehículo automóvil, y a un dispositivo de detección que permite llevar a cabo dicho procedimiento. [0002] Halla una aplicación particular en el ámbito de los vehículos automóviles.
Estado de la técnica
En el caso de una aplicación a un vehículo automóvil, un procedimiento de detección de un fenómeno perturbador de visibilidad, tal como niebla, conocido del estado de la técnica, utiliza una imagen de vídeo para detectar de noche una niebla de densidad elevada. A tal efecto, utiliza el halo luminoso con forma de elipse que se genera por la reflexión de los proyectores en la niebla. La detección de la niebla se hace en función de los parámetros de esta elipse. [0004] Un problema de este estado de la técnica es que no permite detectar una niebla de densidad media o reducida, porque este tipo de niebla no genera un halo suficientemente visible para formar una elipse cuando es iluminada por los proyectores, no pudiendo por lo tanto dicho halo ser utilizado para la detección de la niebla. [0005] En WO03/069275 A1 se ha propuesto un procedimiento de determinación de la presencia de niebla, en el cual se captura al menos una primera imagen de la escena desde el vehículo, se suministra la ordenada del horizonte para dicha primera imagen, se aplica una máscara a dicha primera imagen para obtener una zona de dicha primera imagen, se graba la iluminancia en cada punto de dicha primera imagen, se efectúa una media de esta iluminancia a lo largo de la abscisa de dicha zona para obtener una curva de la iluminancia vertical en función de cada ordenada de dicha zona, y que presenta al menos un punto de inflexión, se determina la ordenada de al menos un punto de inflexión de la curva de iluminancia vertical, se compara dicha ordenada del punto de inflexión con dicha ordenada del horizonte, y se indica la presencia de niebla cuando dicha ordenada del punto de inflexión está situada por debajo de dicha ordenada del horizonte.
Objeto de la invención
La presente invención tiene como objetivo la detección de un fenómeno perturbador de visibilidad tal como niebla, de noche, y ello sea cual sea la densidad de la niebla. [0007] Según un primer objeto de la invención, este objeto se alcanza mediante un procedimiento de detección de un fenómeno perturbador de visibilidad en el entorno de un vehículo automóvil que comprende las etapas consistentes en:
- emitir en el entorno del vehículo un haz luminoso mediante al menos uno de los proyectores del vehículo; -determinar al menos un punto de interés en una imagen adquirida del entorno del vehículo; -determinar una región de interés en dicha imagen; -determinar una curva de niveles de gris a partir de dicha región de interés; y -determinar un área en dicha curva de niveles de gris en función del punto de interés determinado.
Tal como se verá en detalle a continuación, el área determinada en la curva de niveles de gris se modificará en función de las variaciones de la atmósfera que envuelve el alrededor de un vehículo automóvil y delante del vehículo y por lo tanto en función de la presencia de niebla que modificará esta atmósfera. De este modo, esta área permitirá detectar niebla cualquiera que sea su densidad y además determinar la densidad de la niebla gracias a diferentes valores del área. No es por lo tanto necesario utilizar diferentes métodos en función de la densidad de la niebla. Además, un tal procedimiento es de simple realización. [0009] Según modos de realización no limitativos, el procedimiento presenta además las características siguientes:
- el procedimiento comprende una etapa suplementaria de determinar la presencia de un fenómeno perturbador en función de al menos un valor umbral de dicha área. Esto permite no solamente detectar la presencia del fenómeno perturbador sino también determinar su densidad.
- el procedimiento comprende una etapa suplementaria de determinar una distancia de visibilidad en función del área determinada. Esto permite deducir una velocidad máxima de conducción para garantizar una distancia de seguridad óptima. -el punto de interés se sitúa en la línea de horizonte en la imagen. La línea de horizonte es de determinación simple por tratamiento de imágenes. -el vehículo comprende un ángulo del volante, y dicha región de interés se determina en dicha imagen en función de dicho ángulo con el volante. Esto permite tener en cuenta la dirección de la carretera por la cual se desplaza el vehículo y tener así una región de interés homogénea incluso cuando la carretera es sinuosa.
Según un segundo objeto de la invención, se refiere a un dispositivo de detección de un fenómeno perturbador de visibilidad en el entorno de un vehículo automóvil que comprende:
- al menos un proyector para: -emitir un haz luminoso en el entorno del vehículo;
- una unidad de control para: -determinar al menos un punto de interés en una imagen adquirida del entorno del vehículo; -determinar una región de interés en dicha imagen; -determinar una curva de niveles de gris a partir de dicha región de interés; y -determinar un área en dicha curva de niveles de gris en función del punto de interés determinado.
Según un tercer objeto de la invención, se refiere a un producto de programa de ordenador que comprende una o varias secuencias de instrucciones ejecutables por una unidad de tratamiento de información, permitiendo la ejecución de dichas secuencias de instrucciones una realización del procedimiento según cualquiera de las características anteriores.
Breve descripción de las figuras
Otras características y ventajas de la presente invención se entenderán mejor con ayuda de la descripción y de los dibujos no limitativos en los cuales:
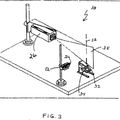
- la figura 1 representa un diagrama de un modo de realización no limitativo del procedimiento de detección según la invención; -la figura 2 es una representación esquemática de una imagen del entorno de un vehículo adquirida por el procedimiento de la figura 1 en ausencia de niebla; -la figura 3 es una representación esquemática de una imagen del entorno de un vehículo adquirida por el procedimiento de la figura 1 en presencia de niebla; -la figura 4 representa la imagen de la figura 2 y una curva de niveles de gris asociada; -la figura 5 representa la imagen de la figura 3 y una curva de niveles de gris asociada; -la figura 6 representa la imagen de la figura 2 sobre la cual se superpone una curva de niveles de gris asociada y un área en esta curva de niveles de gris; -la figura 7 representa la imagen de la figura 3 sobre la cual se superpone una curva de niveles de gris asociada y un área en esta curva de niveles de gris; -la figura 8 ilustra una variación en función del tiempo del área en una curva de niveles de gris calculada por el procedimiento de la figura 1; y -la figura 9 ilustra un modo de realización no limitativo de un dispositivo de realización del procedimiento de la figura 1.
Descripción detallada de modos de realización no limitativos de la invención
El procedimiento de detección de un fenómeno perturbador de visibilidad según la invención se describe en un modo de realización no limitativo en la figura 1. [0014] En esta aplicación, la detección se hace a partir de un dispositivo de detección llevado a bordo de un vehículo V, comprendiendo el vehículo en especial:
- unos proyectores, y -una cámara de vídeo descrita más adelante.
En lo que sigue de la descripción, se toma como ejemplo no limitativo como fenómeno perturbador de visibilidad F una niebla. [0016] Obviamente, el procedimiento puede aplicarse a otros fenómenos perturbadores de visibilidad, es decir cualquier fenómeno F que cree una perturbación atmosférica de manera que genere una pérdida de visibilidad para un usuario del vehículo V, tal como lluvia intensa o también proyecciones de agua (llamadas Gischt en alemán o Spray en inglés) generadas por vehículos que adelantan al vehículo V considerado.
El procedimiento de detección comprende las etapas siguientes, tales como se ilustran en la Figura 1:
- determinar al menos un punto de interés H en una imagen I adquirida del entorno del vehículo V (etapa CALC_H(I)); -determinar una región de interés ROI en dicha imagen I (etapa CALC_ROI(I)); -determinar una curva de niveles de gris CL a partir de dicha región de interés ROI (etapa CALC_CL...
Reivindicaciones:
1. Procedimiento de detección de un fenómeno perturbador de visibilidad (F) en el entorno (E) de un vehículo automóvil (V) que comprende las etapas consistentes en:
- determinar al menos un punto de interés (H) en una imagen (I) adquirida del entorno
(E) del vehículo (V); -determinar una región de interés (ROI) en dicha imagen (I); -determinar una curva de niveles de gris (CL) a partir de dicha región de interés (ROI) caracterizado por el hecho de que el procedimiento comprende las etapas siguientes -emitir en el entorno (E) del vehículo (V) un haz luminoso (FX) mediante al menos uno de los proyectores (PJ) del vehículo (V) y -determinar un área (A) en dicha curva de niveles de gris (CL) en función del punto de interés (H) determinado.
2. Procedimiento de detección según la reivindicación 1, según el cual comprende una etapa suplementaria de:
- determinar la presencia de un fenómeno perturbador (F) en función de al menos un valor umbral (VAs) de dicha área (A).
3. Procedimiento de detección según la reivindicación 1 ó la 2, según el cual comprende una etapa suplementaria de:
- determinar una distancia de visibilidad (DVM) en función del área determinada (A).
4. Procedimiento de detección según cualquiera de las reivindicaciones anteriores, según el cual el punto de interés (H) se sitúa en la línea de horizonte en la imagen (I).
5. Procedimiento de detección según cualquiera de las reivindicaciones anteriores, según el cual el vehículo (V) comprende un ángulo con el volante (α), y dicha región de interés (ROI) se determina en dicha imagen (I) en función de dicho ángulo con el volante (α).
6. Dispositivo (DISP) de detección de un fenómeno perturbador de visibilidad (F) en el entorno (E) de un vehículo automóvil (V) que comprende:
- una unidad de control (UC) para: 5 -determinar al menos un punto de interés (H) en una imagen (I) adquirida del entorno
(E) del vehículo (V); -determinar una región de interés (ROI) en dicha imagen (I); -determinar una curva de niveles de gris (CL) a partir de dicha región de interés (ROI), caracterizado por el hecho de que el dispositivo comprende -al menos un proyector (PJ) para: -emitir un haz luminoso (FX) en el entorno (E) del vehículo (V), y en el que la unidad de control está adaptada para o determinar un área (A) en dicha curva de niveles de gris (CL) en función del punto de interés (H) determinado.
7. Producto de programa (PG) de ordenador que comprende una o varias secuencias de instrucciones ejecutables por una unidad de tratamiento de información, permitiendo la ejecución de dichas secuencias de instrucciones una realización del procedimiento según cualquiera de las reivindicaciones anteriores 1 a 5.
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE LA DISTANCIA DE VISIBILIDAD, del 1 de Diciembre de 2011, de LABORATOIRE CENTRAL DES PONTS ET CHAUSSEES INSTITUT NATIONAL DE RECHERCHE SUR LES TRANSPORTS ET LEUR SECURITE (INRETS): Dispositivo de determinación de la distancia de visibilidad en un paisaje, que comprende: - una cámara para captar una imagen de dicho paisaje para el que debe determinarse […]
 PROCEDIMIENTO DE ADQUISICION DE DATOS DE PULVERIZACION, del 17 de Diciembre de 2009, de IMAGE THERM ENGINEERING: Un procedimiento de adquisición de datos de pulverización que comprende:
iluminar con un dispositivo de iluminación el penacho de pulverización […]
PROCEDIMIENTO DE ADQUISICION DE DATOS DE PULVERIZACION, del 17 de Diciembre de 2009, de IMAGE THERM ENGINEERING: Un procedimiento de adquisición de datos de pulverización que comprende:
iluminar con un dispositivo de iluminación el penacho de pulverización […]
 PROCEDIMIENTO DE ADAPTACIÓN AUTOMÁTICA AL TRÁFICO VIARIO DE UN HAZ LUMINOSO DE UN DISPOSITIVO PROYECTOR, del 21 de Junio de 2011, de VALEO VISION: Procedimiento de adaptación automática de un haz luminoso global producido por un par de dispositivos proyectores de un primer vehículo automóvil […]
PROCEDIMIENTO DE ADAPTACIÓN AUTOMÁTICA AL TRÁFICO VIARIO DE UN HAZ LUMINOSO DE UN DISPOSITIVO PROYECTOR, del 21 de Junio de 2011, de VALEO VISION: Procedimiento de adaptación automática de un haz luminoso global producido por un par de dispositivos proyectores de un primer vehículo automóvil […]
EQUIPO DE AUSCULTACIÓN AUTOMÁTICA DE SEÑALES DE TRÁFICO Y PANELES, del 1 de Febrero de 2012, de EUROCONSULT NUEVAS TECNOLOGIAS, S.A. UNIVERSIDAD DE ALCALA SAFECONTROL S.A: El equipo objeto de invención tiene la finalidad de realizar la auscultación automática de señales y paneles de tráfico, realizando para ello la […]
Módulo transductor y método para usar el módulo transductor, del 6 de Mayo de 2020, de BECKMAN COULTER, INC.: Un módulo transductor para analizar una muestra de sangre completa, que comprende: una cubeta de lectura relativamente fija configurada […]
Aparato de filtro de detección de turbidez, sistemas y métodos para lo mismo, del 22 de Abril de 2020, de FLSMIDTH A/S: Un filtro prensa que comprende: una pluralidad de conjuntos de placa de filtro apilables ; en el que múltiples conjuntos de placa de filtro dentro de la pluralidad […]
Aplicación de herramientas para análisis de reductores de viscosidad para optimizar rendimiento, del 8 de Abril de 2020, de BL Technologies, Inc: Un procedimiento para reducir y optimizar la tasa de ensuciamiento en una unidad de proceso que comprende los pasos de: estimar […]
 Alineación de haces, del 29 de Enero de 2020, de FFE Limited: Un procedimiento para alinear de manera automática un haz proyectado en un reflector en un detector de haz de tipo reflectante, el procedimiento comprende:
proporcionar […]
Alineación de haces, del 29 de Enero de 2020, de FFE Limited: Un procedimiento para alinear de manera automática un haz proyectado en un reflector en un detector de haz de tipo reflectante, el procedimiento comprende:
proporcionar […]